






Kinect V2 简介
文章为个人学习笔记 整理了一些网络资源和视频知识。
提示:自己也是小白,文章不免会出现不少的错误。
前言
自学笔记
一、Kinect V2是什么?

Kinect是微软在2009年公布的XBOX360体感周边外设。
它是一种3D体感摄影机,同时它导入了即时动态捕捉、影像辨识、麦克风输入、语音辨识、社群互动等功能。玩家可以通过这项技术在游戏中开车、与其他玩家互动、通过互联网与其他Xbox玩家分享图片和信息等。
简而言之就是一个高级的摄像头。
二、硬件信息
1.摄像头结构
因为刚刚开始学 东西也不是很便宜还没敢拆了 细看
等项目结题就拆来看看

摄像头包括一个RGB彩色摄像头,一个深度摄像头,一个IR红外摄像头
一个四元线性麦克风阵列
一个信号灯
2.连接线
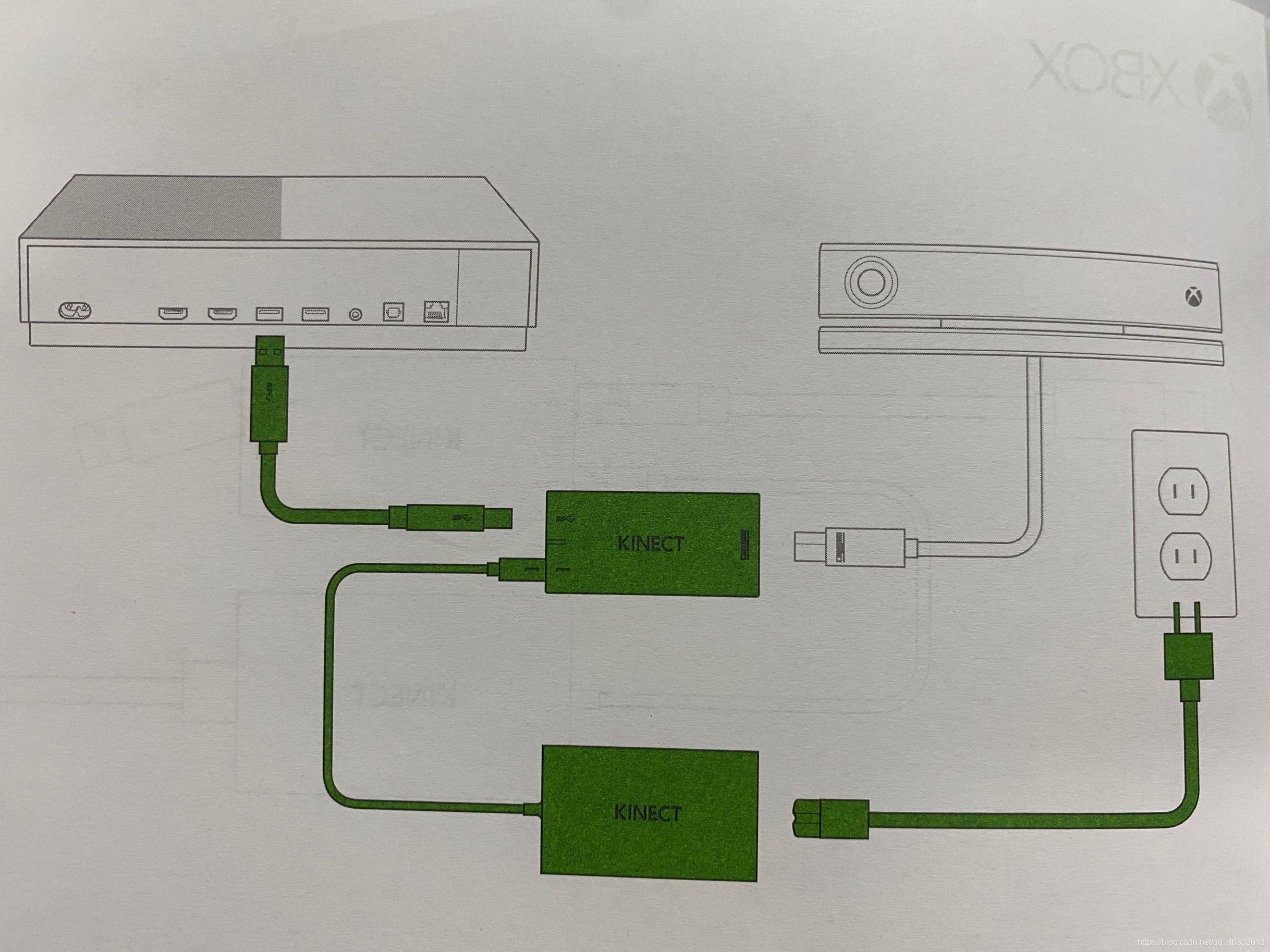
大概的连接图是这样
三、软件准备
1.kinect for window SDK v2.0
链接: SDK下载.
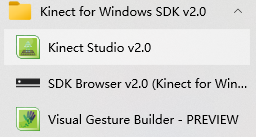
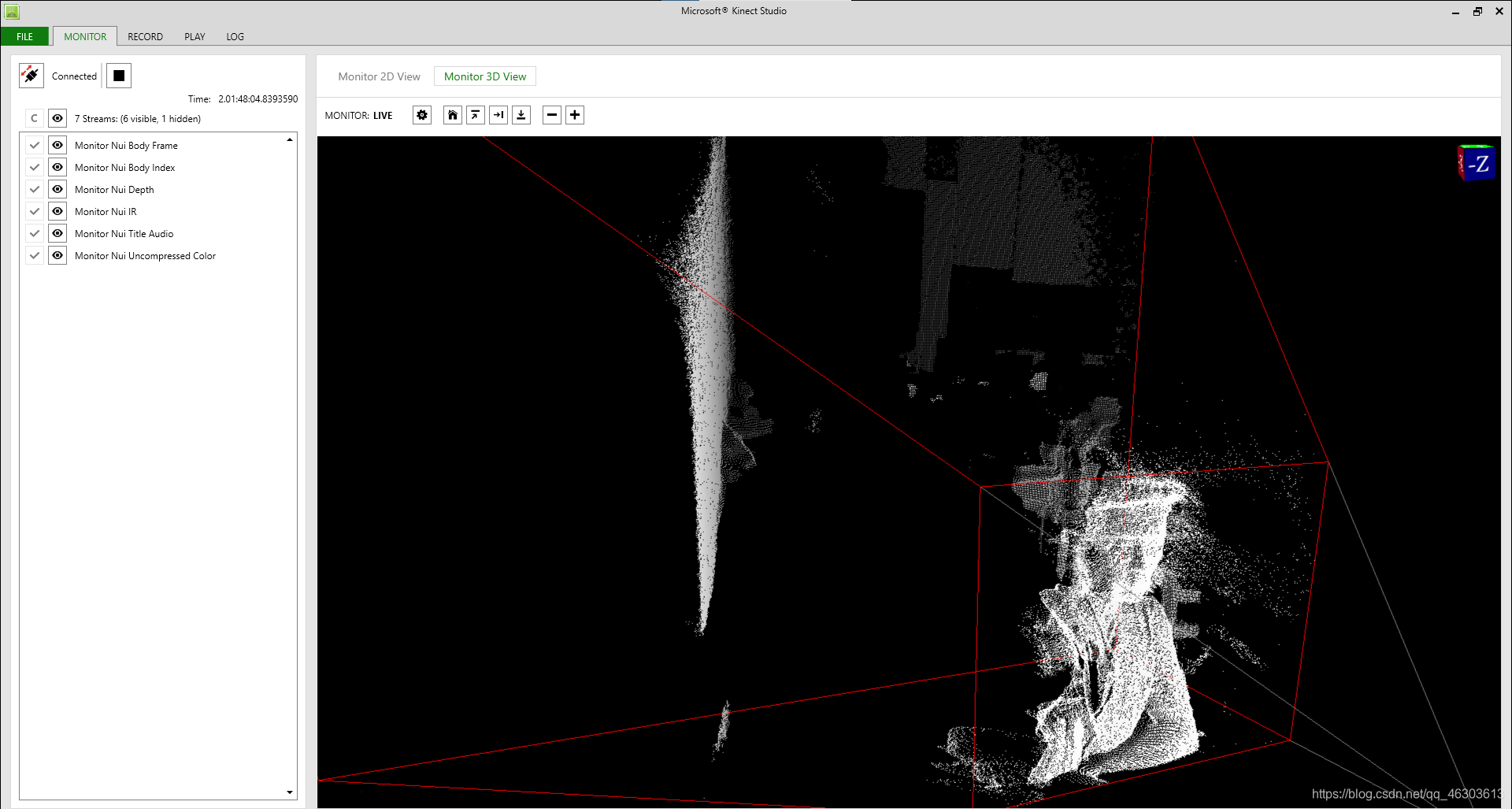
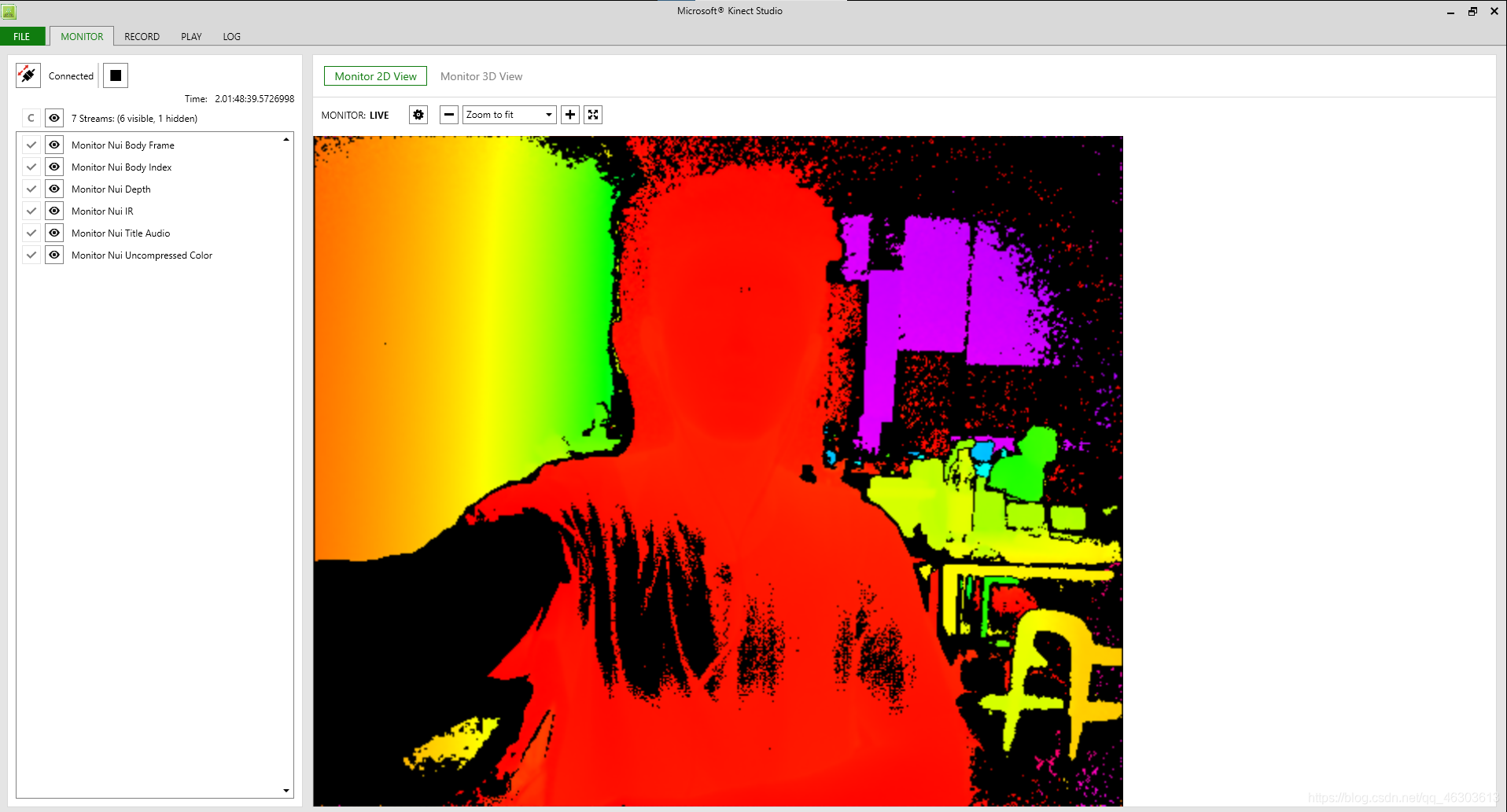
安装完SDK,正确连接好Kinect后会自动安装驱动,没有的话请重启试试。 打开Kinect Studio 点击左上角那个连接 就可以看见基本的东西了
2.VS code
链接: VS下载.

我安装的2019版本的,应该问题不大吧
持续更新中。。。。

















 7228
7228

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









