







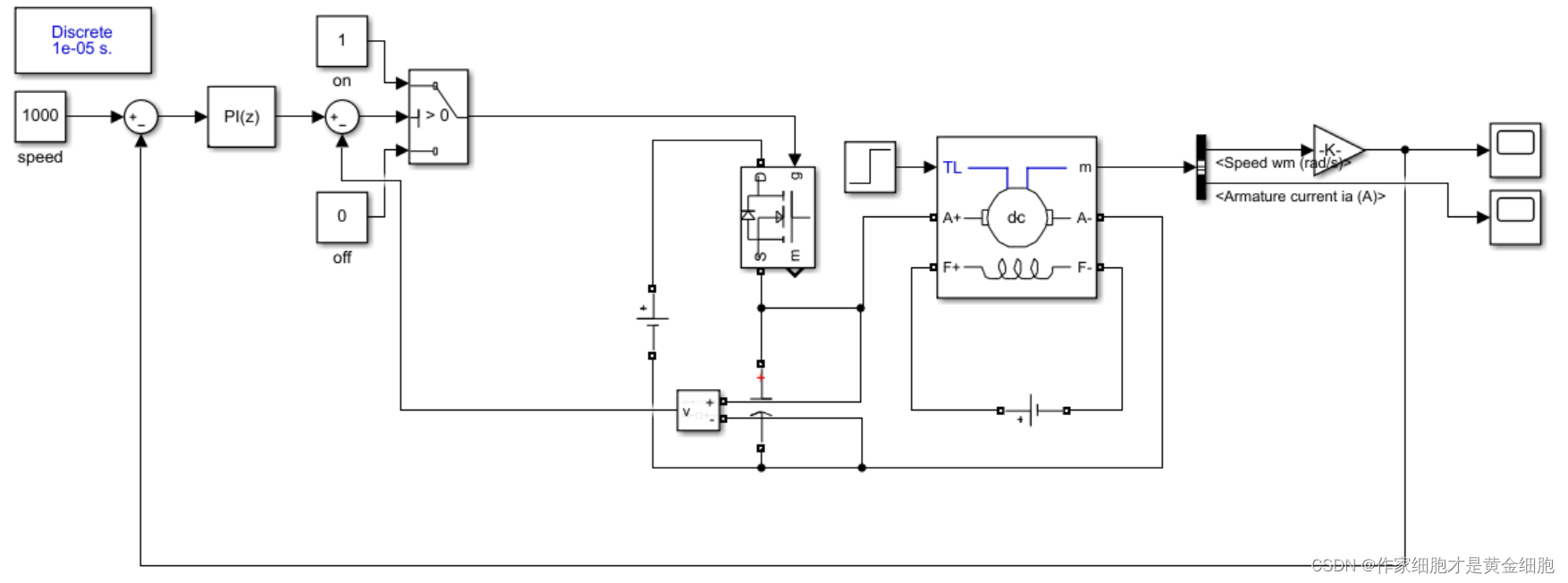
最近在进行直流电机单闭环调速仿真时,复现了一下之前已有的仿真,搭建完在调试过程中出现了两个问题,记录一下。下图为本次搭建的仿真模型。
现象1:PI参数调节过程中,转速没有变化,且处在额定转速之上
分析1:转速处于失控情况,说明闭环没有发挥作用。
解决1:在三相电机的测量端,输出的为机械角速度,单位为(rad/s)。给定参考转速的单位采用(r/min)。简单的直接闭环会导致误差很大,PI完全是失效的。如图2所示,电机实际转速反馈值接成左图或是右图完全是两种情况,很显然左侧是错误接线,将接线改为右侧即可。
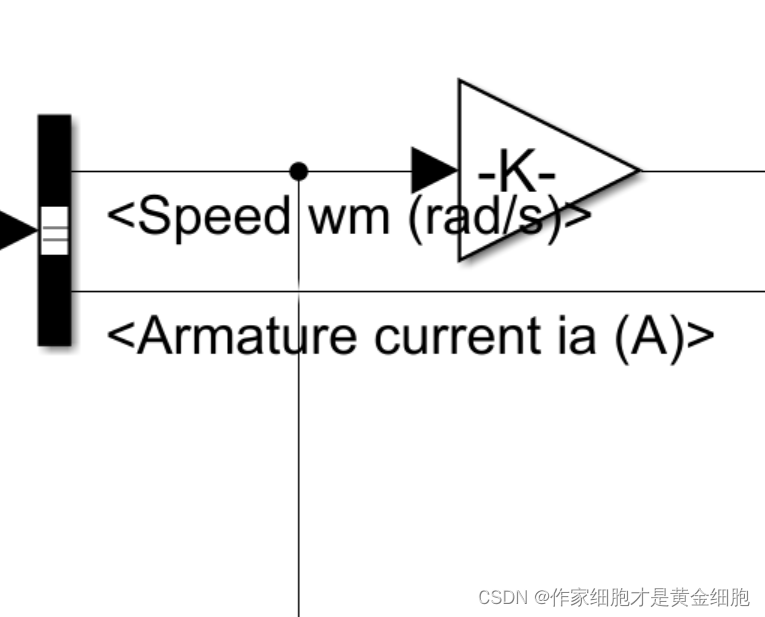
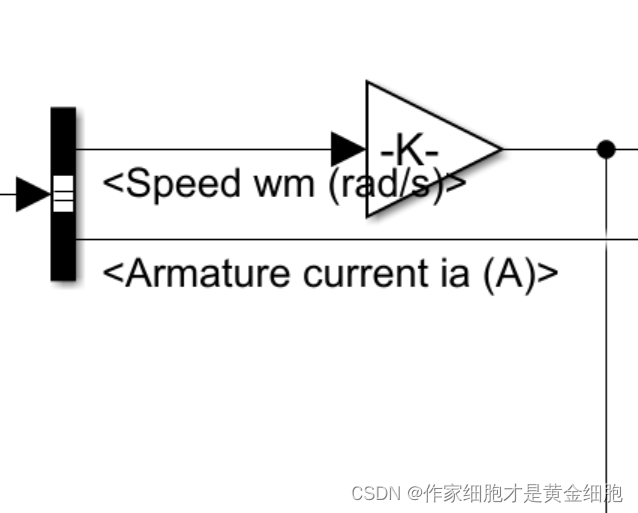
图 2
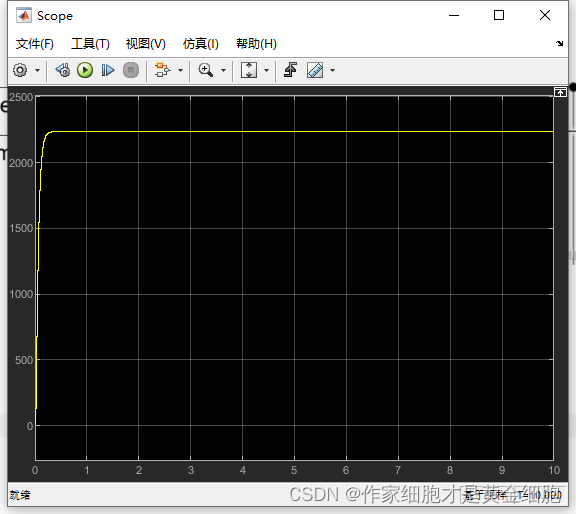
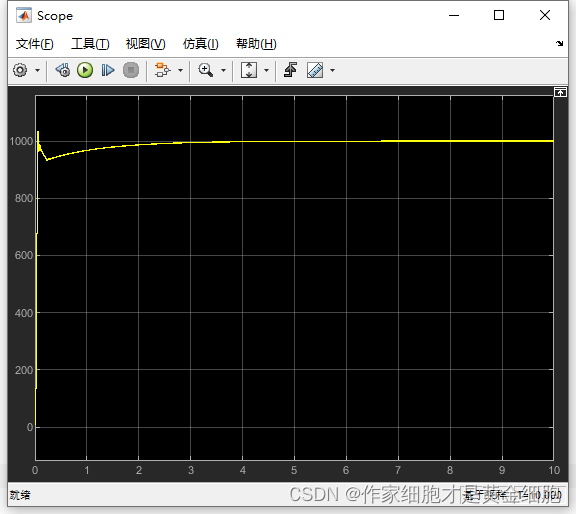
图 3
现象2:转速波形波动现象明显,且PI参数很难调节
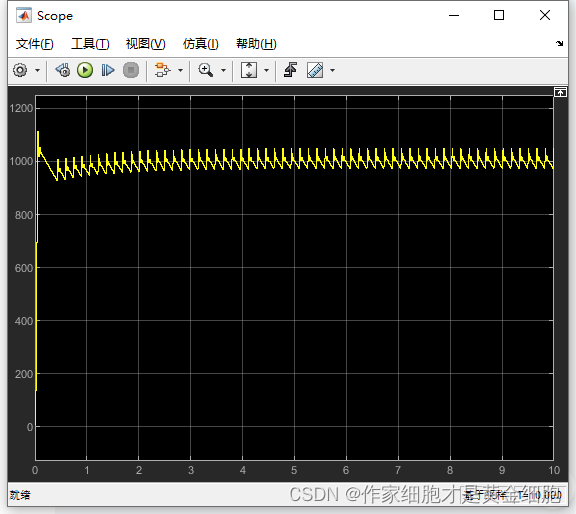
图 3
分析2:PI调节器模块没问题,那么肯定是PI输出的结果导致后续调节效果不好。
解决2:通过对比发现,在复现仿真的过程中,习惯性拖出的开关管为IGBT,将其修改为MOSFET即可以获得很好的PI调节效果。分析一下原因,为什么IGBT不如MOSFET控制效果好呢?
我们先看一下Simulink中默认的两个模块参数值,如图4:
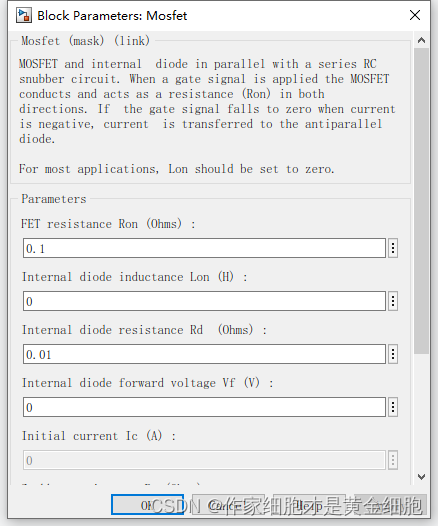

图 4
可以看出,仿真系统默认给出的MOSFET通态电阻为IGBT的100倍,也就是说,MOSFET通态压降很大。翻一下圣经(其实是《电力电子技术》这本书,我师兄这样讲的。。),书中有这样一句话:IGBT的导通电阻比相同电压定额的MOSFET小。我这样理解:这也就是为什么在大电流时,我们通常选择IGBT,因为相比之下,IGBT的通态压降小,损耗少。















 1473
1473

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









