







Mamba模型的提出者为Albert Gu、Tri Dao,前者现在是CMU助理教授,多年来一直推动SSM发展,曾在DeepMind 工作,后者则为Flash Attention一作。
Mamba模型作为Transformer极具革命性的平替,开拓了AI界研究大模型的思路,讲清三个问题:
从SSM、HiPPO、S4起步,逐步推导到Mamba
Transformer的死穴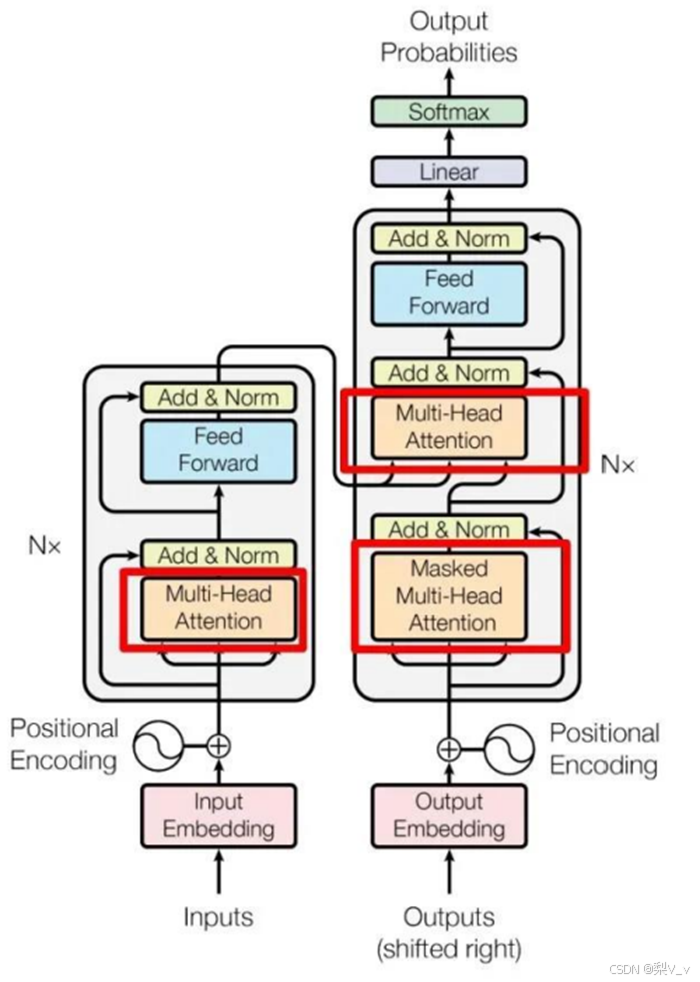
Transformer 结构的核心是自注意力机制层,不管Encoder,还是Decoder,序列数据都先经过位置编码后喂给这个模块。
这里有个天然的缺陷,就是自注意力机制的计算范围仅限于窗口内,而无法直接处理窗口外的元素。这种机制无法建模超出有限窗口的任何内容,看不到更长序列的世界。
Transformer模型的二次复杂度问题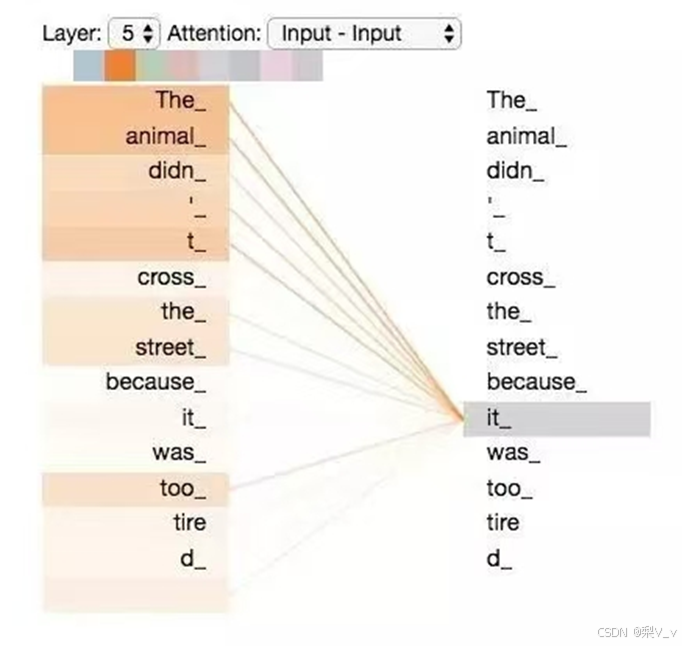
于是有人说了,那增加窗口长度不就行了,理论上可行。但,这样会导致计算复杂度随着窗口长度的增加呈平方增长O(n2),因为每个位置的计算都需要与窗口内的所有其他位置进行比较,如右图所示。
推理的缺陷
在生成序列中的下一个tokens时,我们必须重新计算整个序列的注意力,即使某些tokens已经被生成。

为长度为L的序列生成tokens大约需要L²计算,如果序列长度增加,计算成本可能会很高。

Transformer忽视了数据内在结构的细腻关联关系,而是采取了一种一视同仁的暴力关联模式,好处是直接简单,但显然参数效率低下,冗余度高,训练起来不易。
让长序列数据建模回归传统,某种程度上说,这是整个SSM类模型思考问题的初衷和视角。而Mamba是其中的佼佼者。
状态空间模型 (SSM)
状态空间模型(SSM),与Transformer和RNN一样,用于处理信息序列,例如文本和信号。在本节中,我们将探讨SSM的基本概念以及它们如何与文本数据相互作用。
什么是状态空间?
状态空间是一组能够完整捕捉系统行为的最少变量集合。它是一种数学建模方法,通过定义系统的所有可能状态来表述问题。
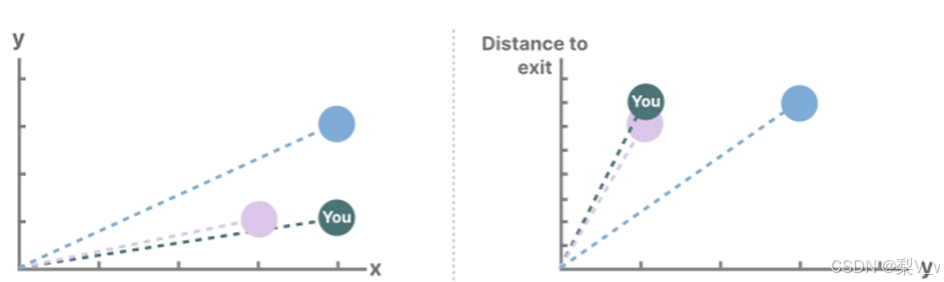
想象我们正在走过一个迷宫。这里的“状态空间”就像是迷宫中所有可能位置的集合,即一张地图。地图上的每个点都代表迷宫中的一个特定位置,并包含了该位置的详细信息,比如离出口有多远
虽然状态空间模型利用方程和矩阵来记录这种行为,但它们本质上是一种记录当前位置、可能的前进方向以及如何实现这些移动的方法。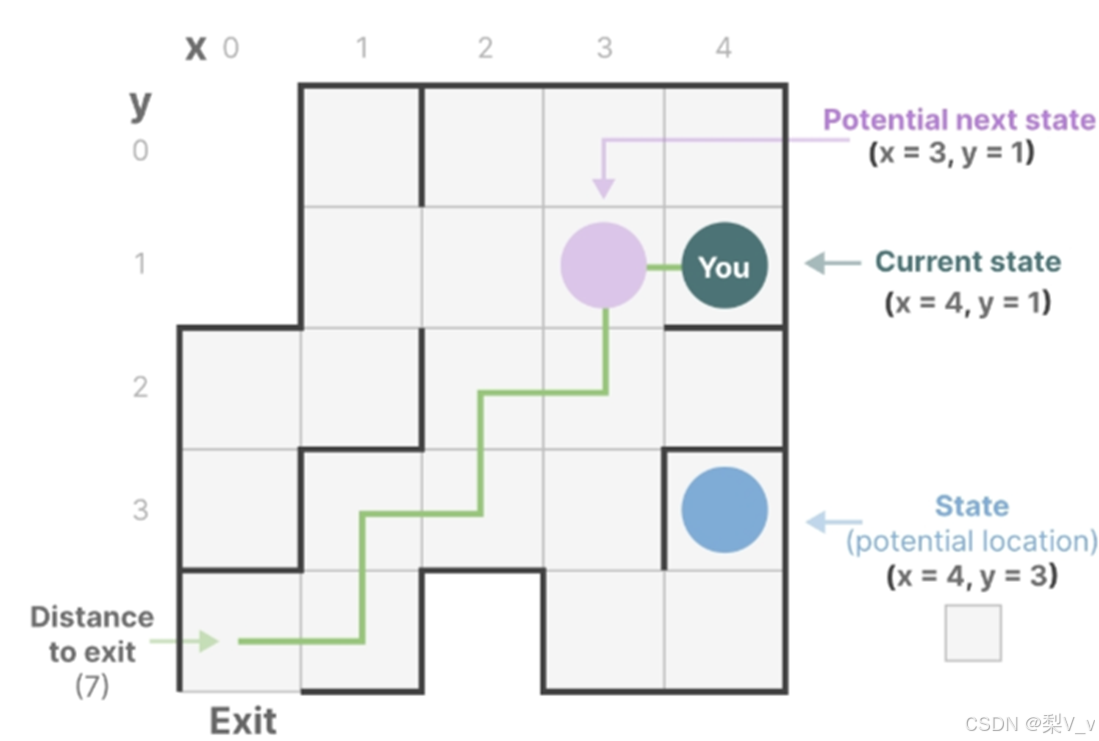
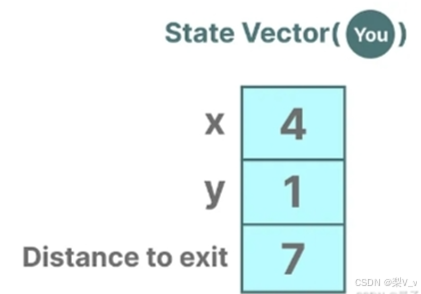
描述状态的变量(在我们的迷宫例子中,这些变量可能是X和Y坐标以及与出口的相对距离)被称作“状态向量”。
这个概念听起来是不是有些耳熟?那是因为在语言模型中,我们经常使用嵌入或向量来描述输入序列的“状态”。
在神经网络的语境中,“状态”通常指的是网络的隐藏状态。在大型语言模型的背景下,隐藏状态是生成新tokens的一个关键要素。
什么是状态空间模型?
状态空间模型(SSM)是用来描述这些状态表示,并根据给定的输入预测下一个可能状态的模型。
SSM是控制理论中常用的模型,在卡尔曼滤波、隐马尔可夫模型都有应用。它是利用了一个中间的状态变量,使得其他变量都与状态变量和输入线性相关,极大的简化问题。
物理例子推导公式
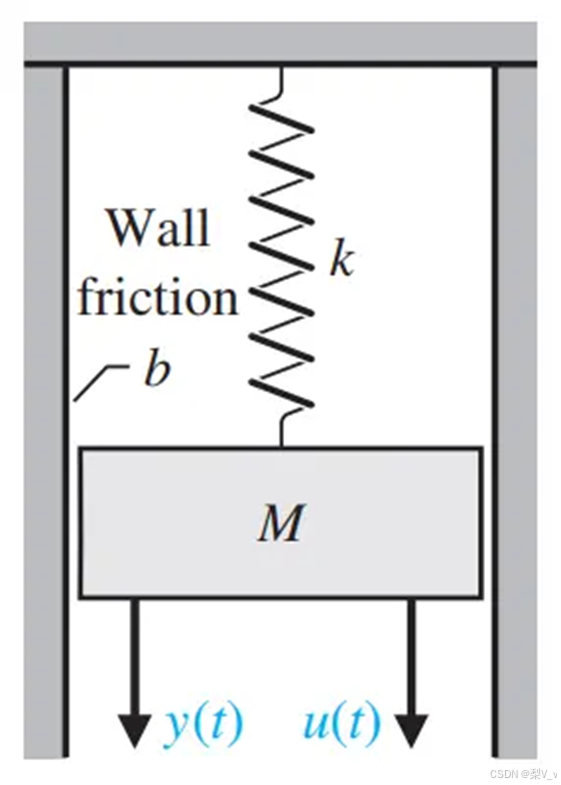
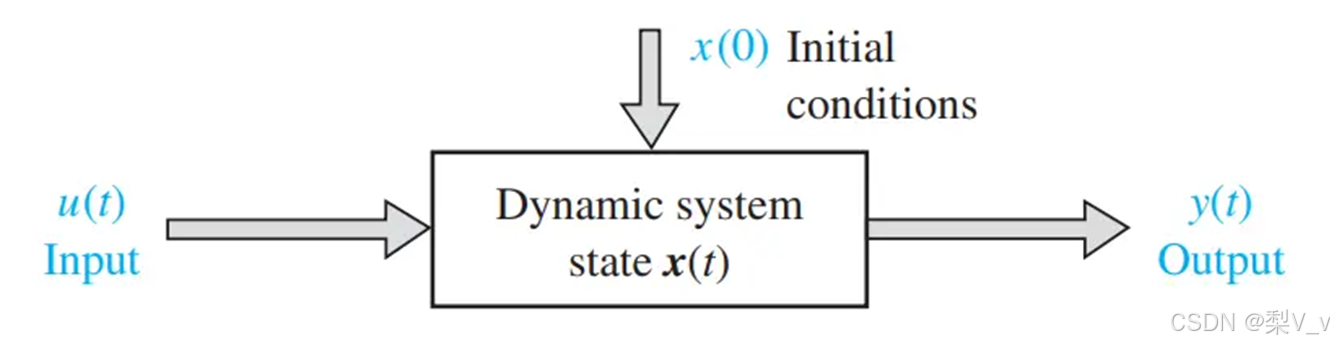
当我们给定一个力u(t) 作为系统的输入,求物体M的位移y(t) 作为系统的输出。
根据受力平衡可以得到表达式

上式是一个典型的二阶微分方程,但是对于任意的时间序列来说没有解析解,如何得到逼近的解是关键。
如果我们构建一个状态向量
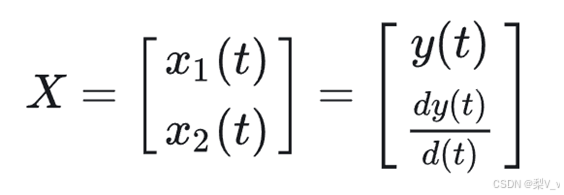
这里直接将输出函数和输出的函数的一阶导数作为状态向量。其实定义是多样的,只要能简化计算过程即可。于是可以得到
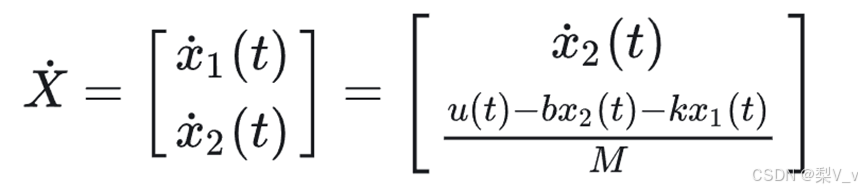
即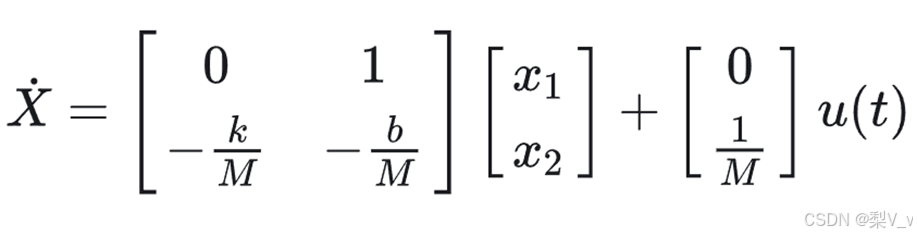
同时,输出y也可以写成关于当前状态的方程:
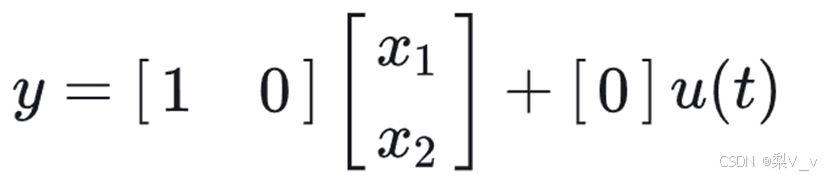
因此,当给定输入u(t) ,并给定一个初始状态x(0) 时,就可以实时的计算输出。
一般来说,可以得到如下两个方程
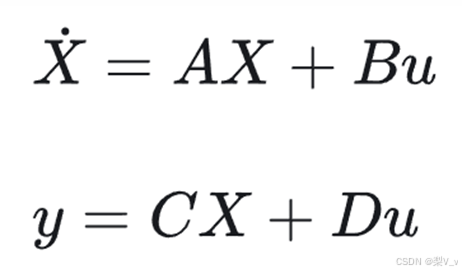
即模型的输出量,以及状态的变换量都可以由当前状态和输入量计算出来。下图也表明了这个过程。
状态空间模型(SSM)
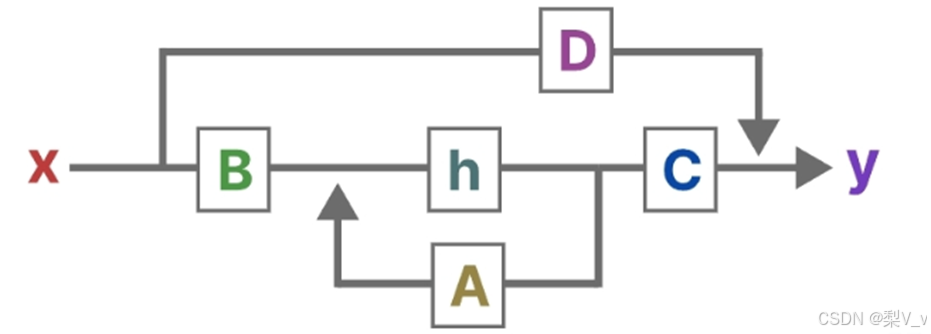
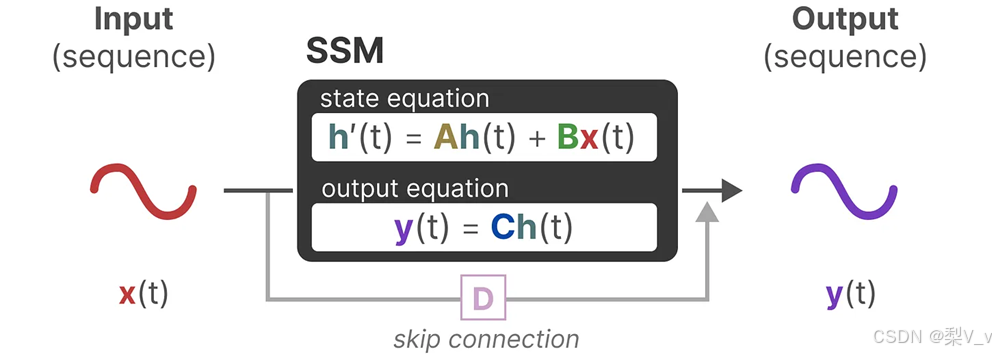
状态空间模型(SSM)假定动态系统(比如在三维空间中移动的物体)的状态可以通过两个数学方程来预测,这两个方程描述了系统在时间t时的状态如何随时间演变。
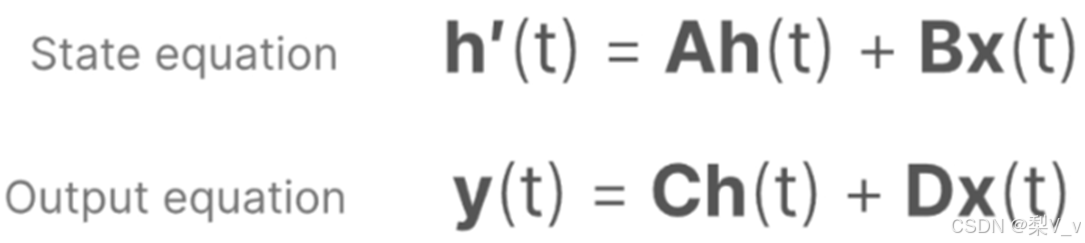
这两个方程构成了状态空间模型的核心。
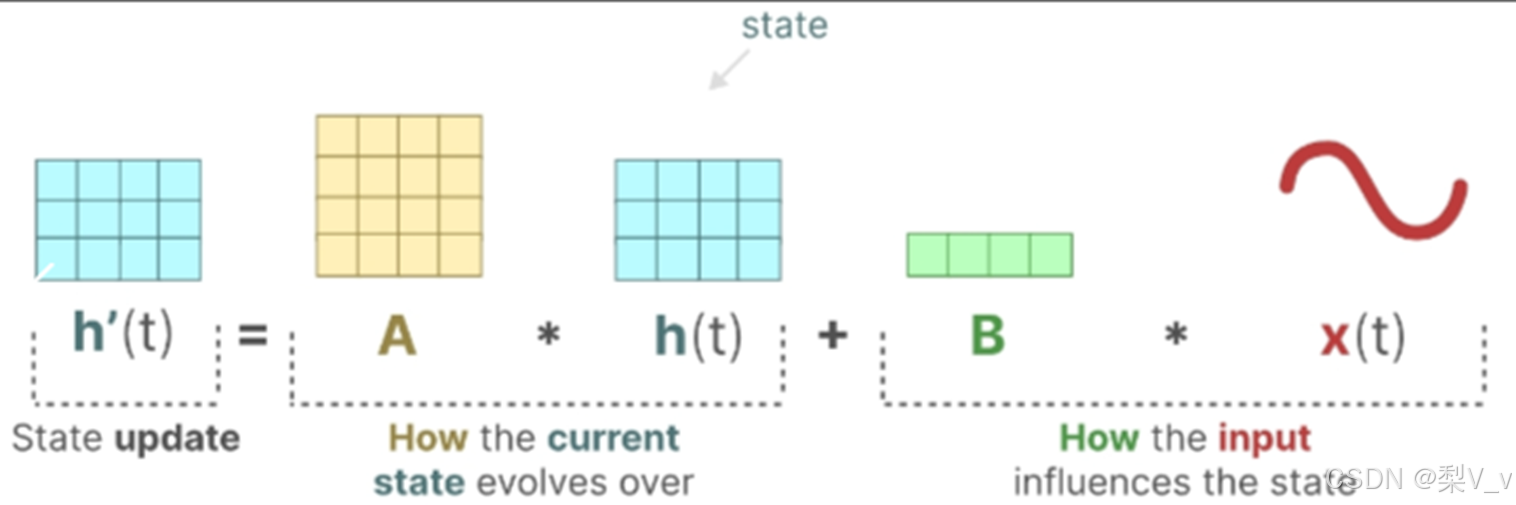
状态方程展示了输入如何通过矩阵B影响状态,以及状态如何通过矩阵A随时间变化。
正如我们之前看到的,h(t)指的是任何给定时间t的潜在状态表示,而x(t)指的是某个输入。
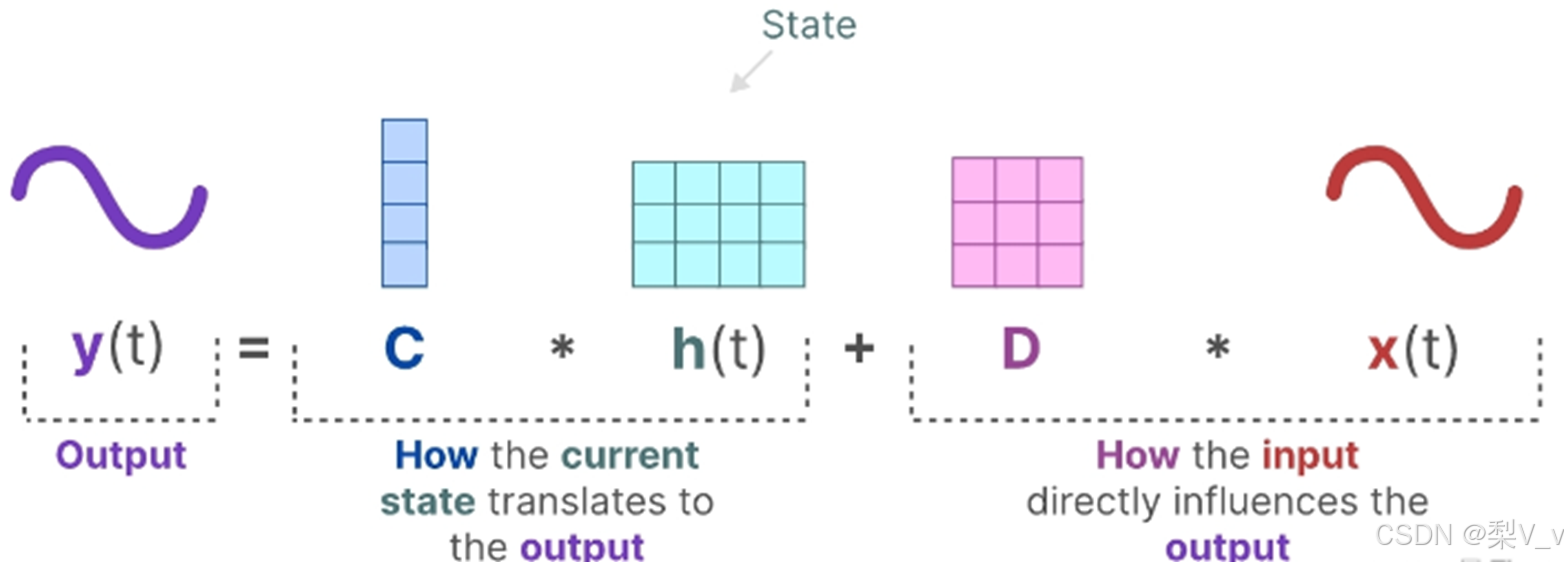
输出方程描述了状态如何转换为输出(通过矩阵 C)以及输入如何影响输出(通过矩阵 D )。
注意:矩阵A、B 、C和D通常也称为参数,因为它们是可学习的。
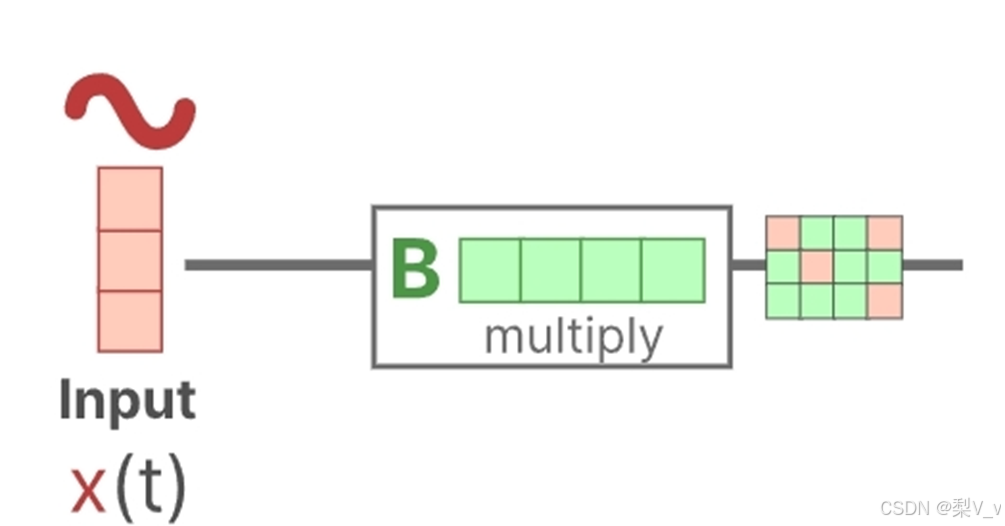
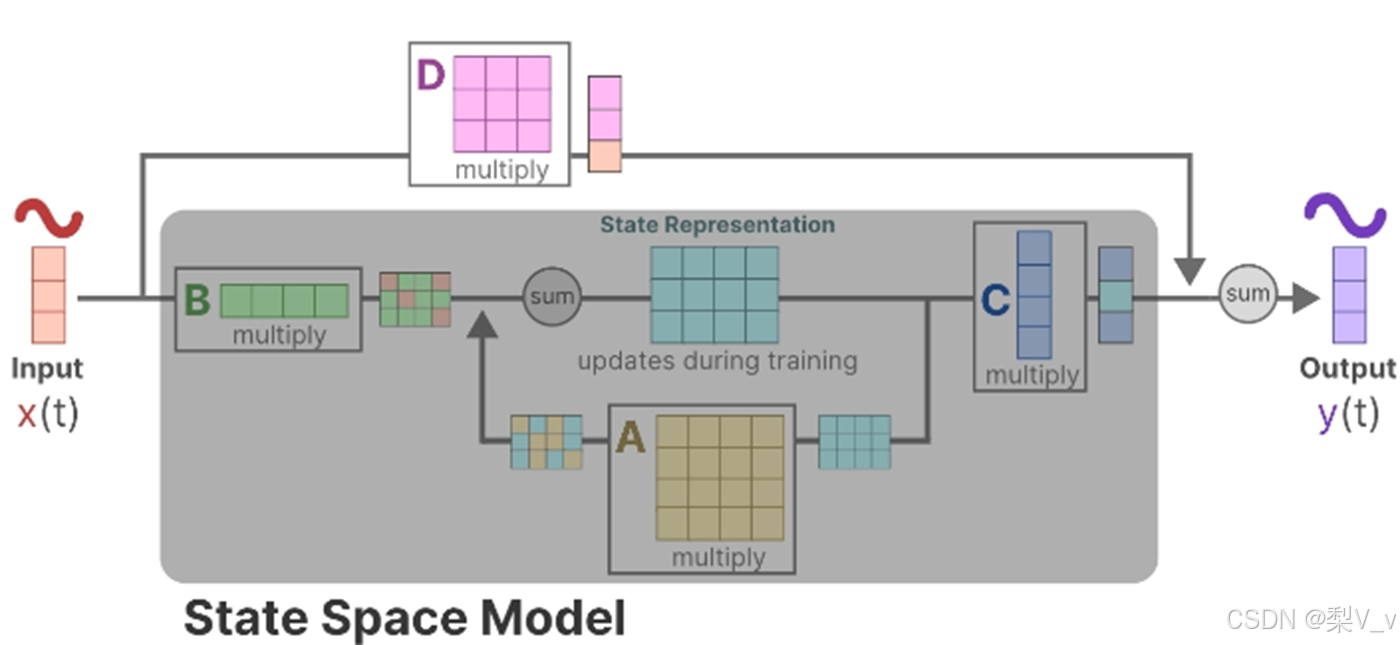
设想我们有一个输入信号x(t),这个信号首先与矩阵B相乘,而矩阵B刻画了输入对系统的影响程度。
更新后的状态(类似于神经网络的隐藏状态)是一个潜在空间,它包含了环境的核心“知识”。我们将这个状态与矩阵A相乘,矩阵A揭示了所有内部状态是如何相互连接的,因为它们代表了系统的基本动态。
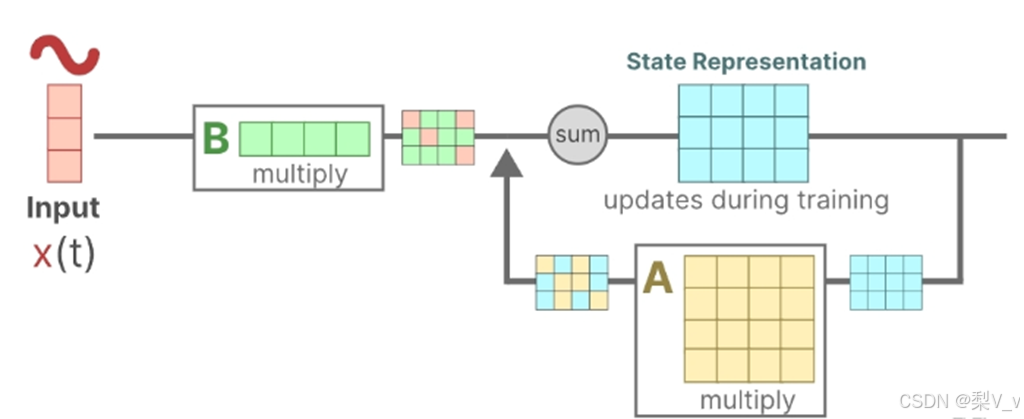
矩阵A在创建状态表示之前被应用,并在状态表示更新之后进行更新。
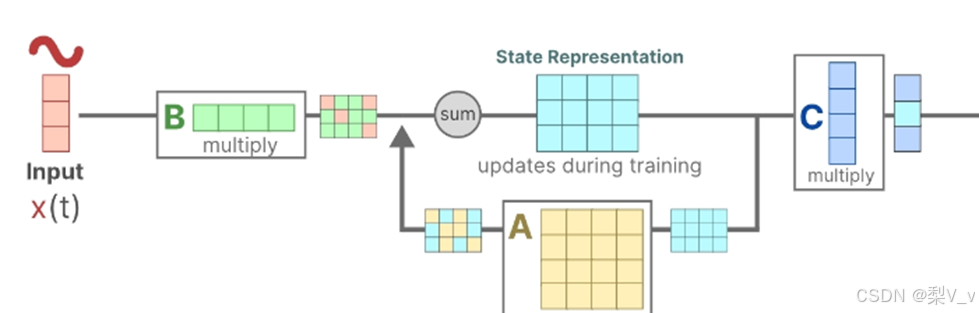
利用矩阵C来定义状态如何转换为输出。
最后,我们可以利用矩阵 D提供从输入到输出的直接信号。这通常也称为跳跃连接。
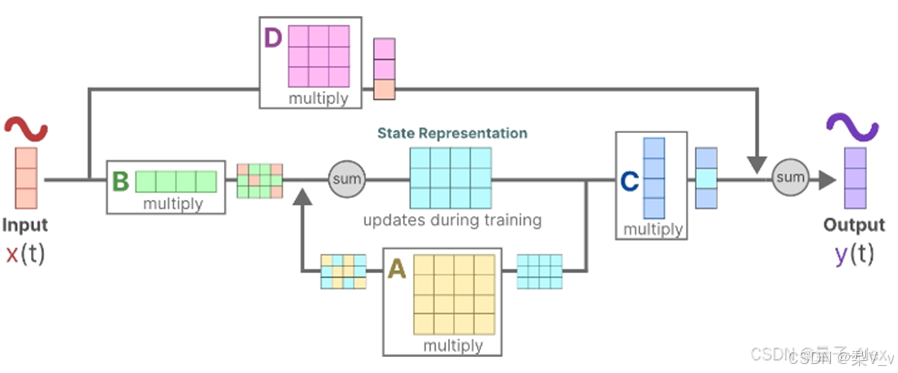
由于矩阵 D类似于跳跃连接,因此在没有跳跃连接的情况下,SSM 通常被视为如下。
时不变特性
之所以叫时不变(与时间无关),就是 ABCD参数是固定的,这当然是一种假设,而且是个强假设。D在许多实际系统中,它可以是零。很多人学 SSM渐渐就忘了这个强假设。Transformer本身是没有这样的假设的,也就是说可以用于时变系统和非线性系统。
牺牲通用性,换来特定场景下的更高性能,这就是所有SSM模型的最底层逻辑。
连续系统转化为离散系统
采用了零阶保持(Zero-Order Hold)技术。其工作原理如下:每当接收到一个离散信号时,我们就保持该信号值不变,直到下一个离散信号的到来。
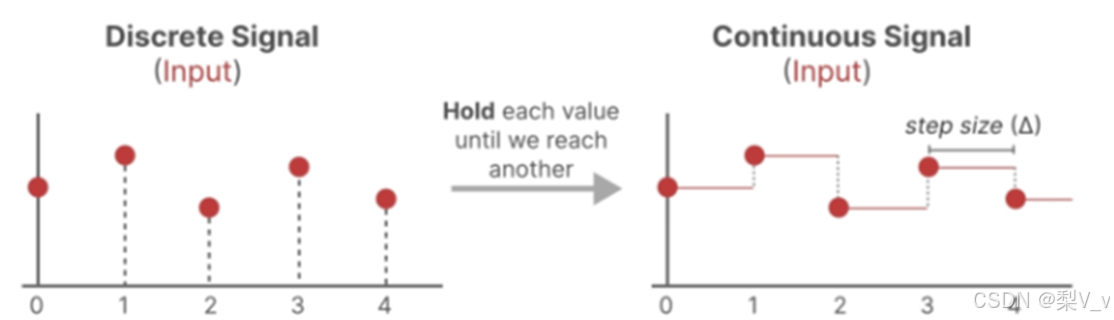
我们保持信号值的时间由一个新的可学习参数表示,这个参数称为步长Δ 。它代表了输入信号的分辨率。(效果上看,左图代替右图。)
离散化
离散化主要是为了方便计算机处理。
从数学角度来看,我们可以按照以下方式应用零阶保持技术:

有几种有效的离散化方法,如欧拉方法、零阶保持器(Zero-order Hold, ZOH)方法或双线性方法。欧拉方法是最弱的,但在后两种方法之间的选择是微妙的。事实上,S4论文采用的是双线性方法,但Mamba使用的是ZOH。
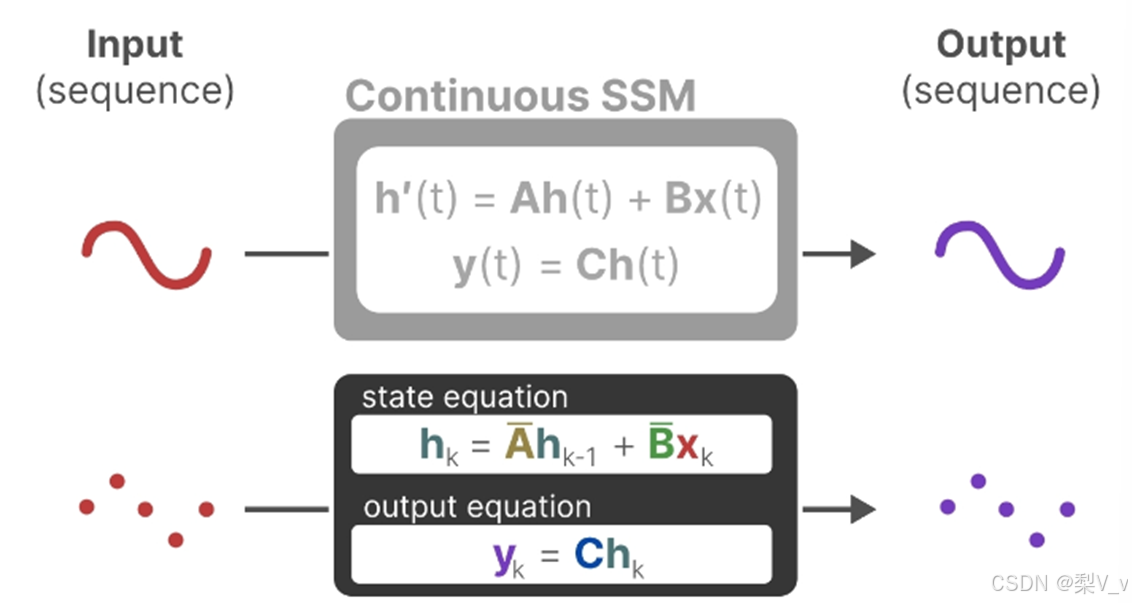
我们从一个连续的SSM(函数到函数,x(t)→y(t))到一个离散SSM(序列到序列,xₖ→yₖ)。
这里,矩阵A和B现在表示模型的离散参数。
我们使用k而不是t来表示离散时间步长,并在我们提到连续 SSM 与离散 SSM 时使其更加清晰。
矩阵A的重要性
矩阵A可以说是状态空间模型(SSM)公式中最为关键的组成部分之一。正如我们之前在循环表示中所讨论的,矩阵A负责捕捉先前状态的信息,并利用这些信息来构建新的状态。
如何创建一个能够保持大容量记忆(即上下文大小)的矩阵A呢?
HiPPO
HiPPO(Hungering Hungry Hippo),这是一个高阶多项式投影运算器。HiPPO的目标是将迄今为止观察到的所有输入信号压缩成一个系数向量。
HiPPO利用矩阵A构建一个状态表示,这个表示能够有效地捕捉最近token的信息,并同时让旧token的影响逐渐减弱。其公式可以表示为: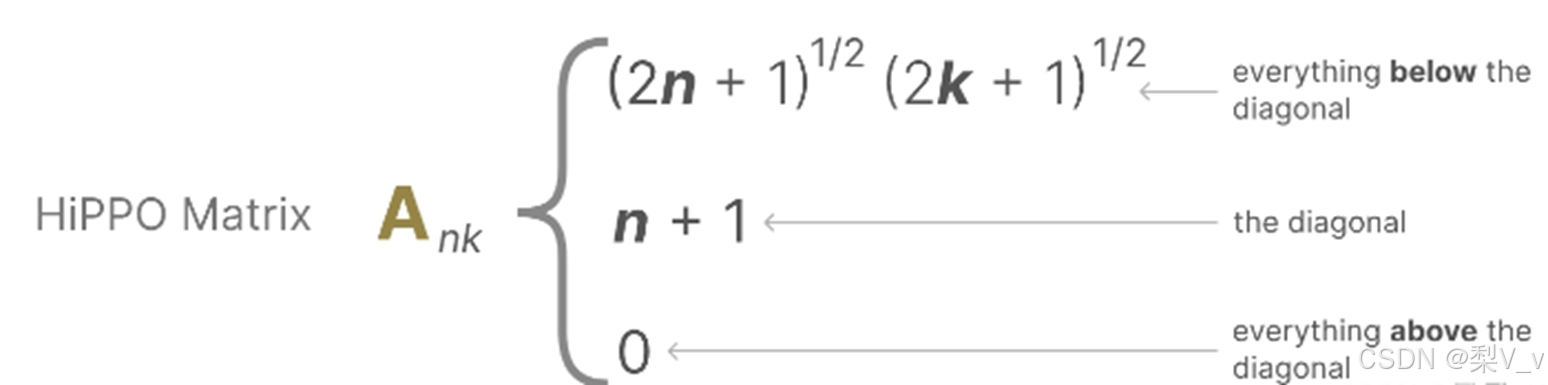
实践证明,使用HiPPO构建矩阵A的方法明显优于随机初始化。因此,它能够更精确地重建最新的信号(即最近的tokens),而不仅仅是初始状态。
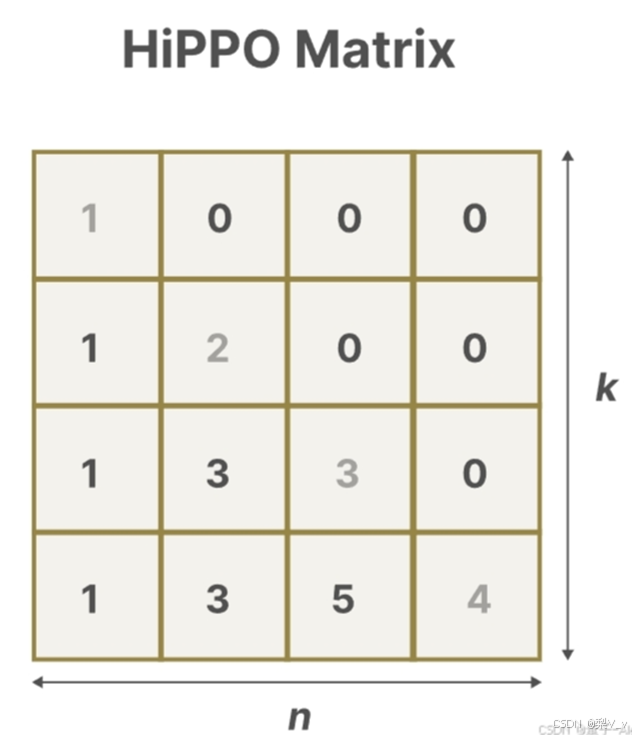
HiPPO矩阵的核心在于其能够生成一个隐藏状态,用以存储历史信息。
(在数学上,这是通过追踪勒让德多项式的系数来实现的,这使得它能够近似所有历史数据。)
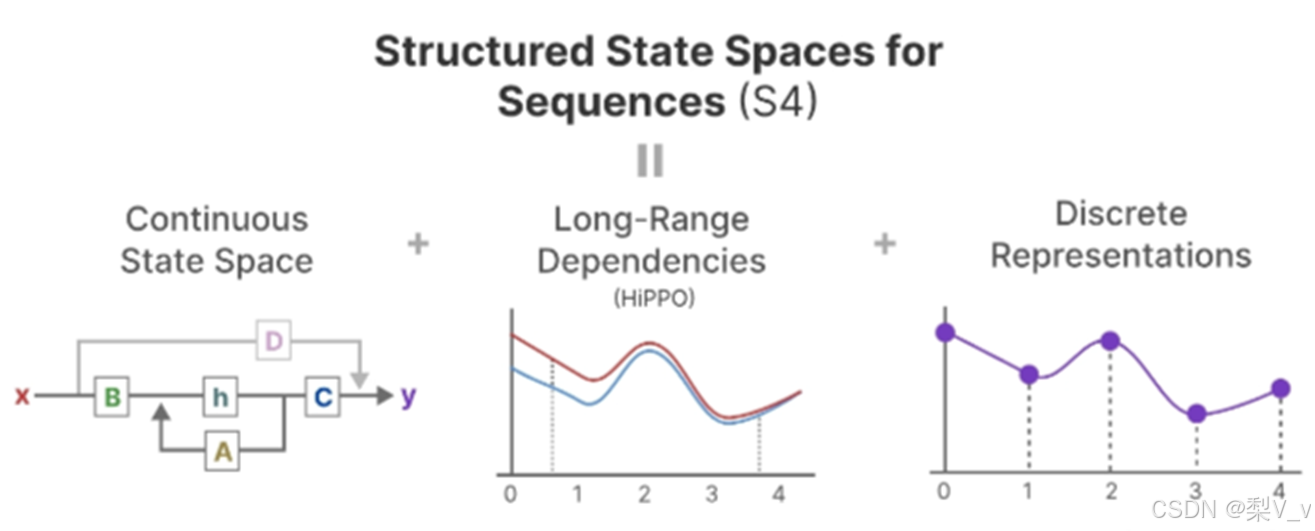
S4
HiPPO随后被应用到循环和卷积表示中,以处理远程依赖关系。这导致了序列的结构化状态空间Structured State Space for Sequences(S4)的产生,这是一种能够有效处理长序列的SSM。
S4由三部分组成:
Mamba的三大创新
Mamba = 有选择处理信息 + 硬件感知算法 + 更简单的SSM架构
1.简单的选择机制
通过“参数化SSM的输入”,让模型对信息有选择性处理,以便关注或忽略特定的输入
这样一来,模型能够过滤掉与问题无关的信息,并且可以长期记住与问题相关的信息
好比,Mamba每次参考前面所有内容的一个概括,越往后写对前面内容概括得越狠,丢掉细节、保留大意
各个模型的核心特点
| 模型 | 对信息的压缩程度 | 训练的效率 | 推理的效率 |
| Transformer(注意力机制) | Transformer对每个历史记录都不压缩 | 训练消耗算力大 | 推理消耗算力大 |
| RNN | 随着时间的推移,RNN 往往会忘记某一部分信息 | RNN没法并行训练 | 推理时只看一个时间步 故推理高效(相当于推理快但训练慢) |
| CNN | 训练效率高,可并行「因为能够绕过状态计算,并实现仅包含(B, L, D)的卷积核」 | ||
| SSM | SSM压缩每一个历史记录 | 矩阵不因输入不同而不同,无法针对输入做针对性推理 | |
| Mamba | 选择性的关注必须关注的、过滤掉可以忽略的 | Mamba每次参考前面所有内容的一个概括,兼备训练、推理的效率 | |
有选择地保留信息
SSM的循环表示创建了一个非常高效的小状态,因为它压缩了整个历史记录。然而,与不压缩历史记录(通过注意力矩阵)的Transformer模型相比,它的功能要弱得多。
Mamba的目标是实现两全其美:创建一个像Transformer一样强大的小状态。
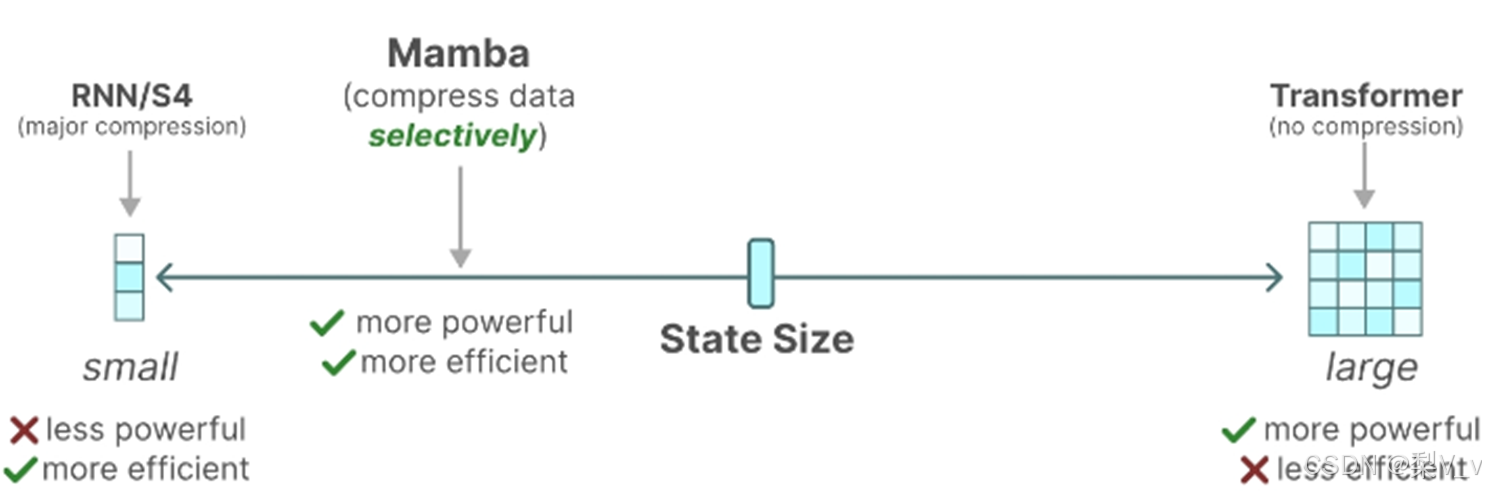
Mamba通过有选择地将数据压缩到状态中来实现这一目标。当输入一个句子时,通常会包含一些没有多大意义的信息,例如停用词。
为了有选择地压缩信息,我们需要参数依赖于输入。为此,我们首先探讨训练期间SSM中输入和输出的维度。
S4中三个矩阵:A∈RN×N,B∈RN×1,C∈R1×N矩阵都可以由𝑁个数字表示。
但为了对批量大小为B,长度为L,具有D个通道的输入序列𝑥进行操作。总之,类似总计有B个序列,每个序列的长度为L,且每个序列中每个token的维度为D。
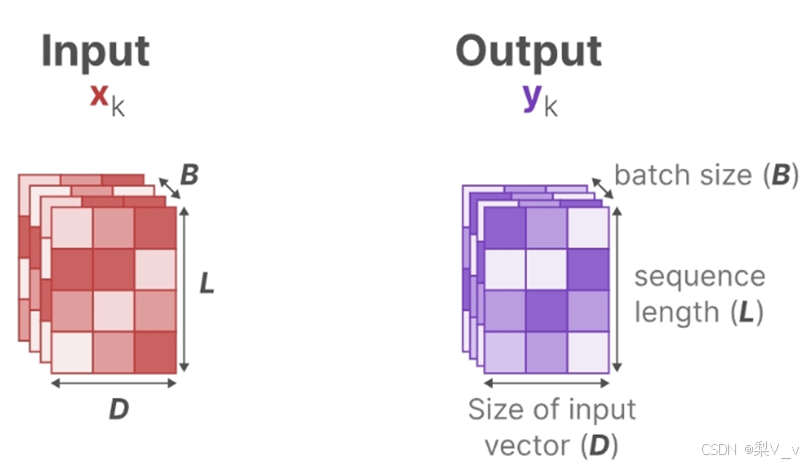
在结构化状态空间模型 (S4) 中,矩阵A、B和C独立于输入,因为它们的维度N和D是静态的并且不会改变。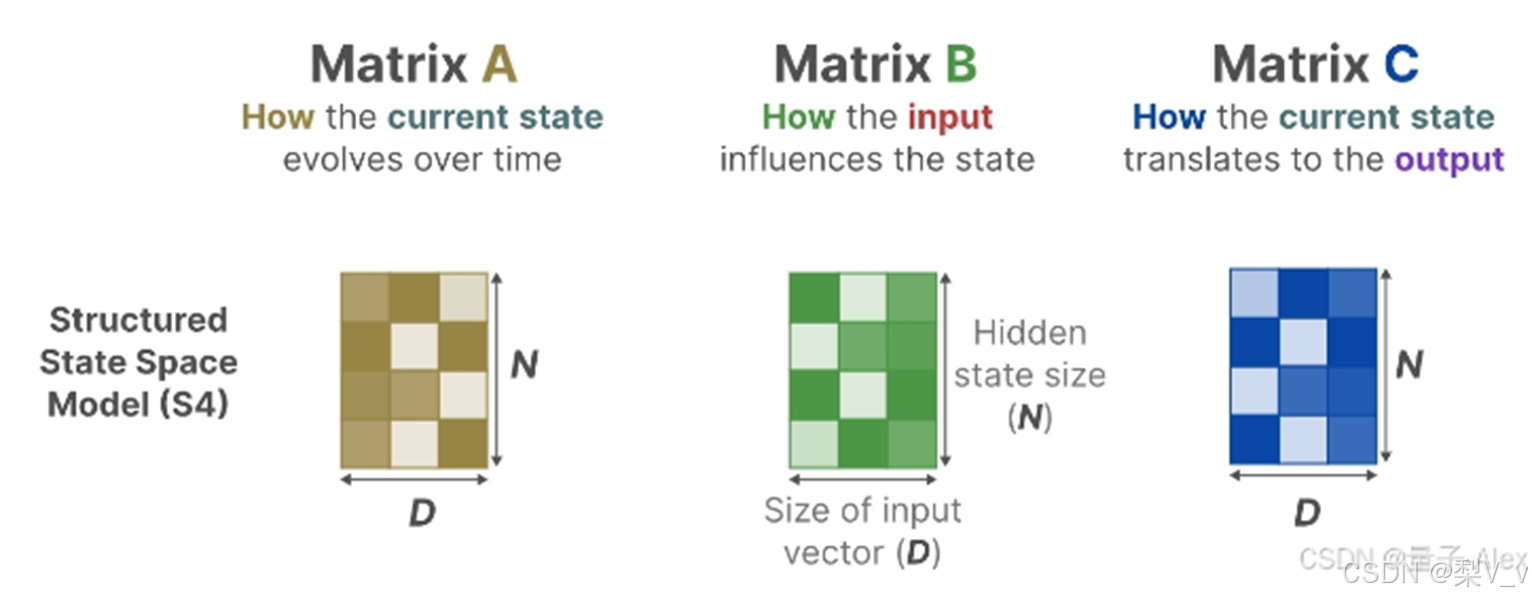
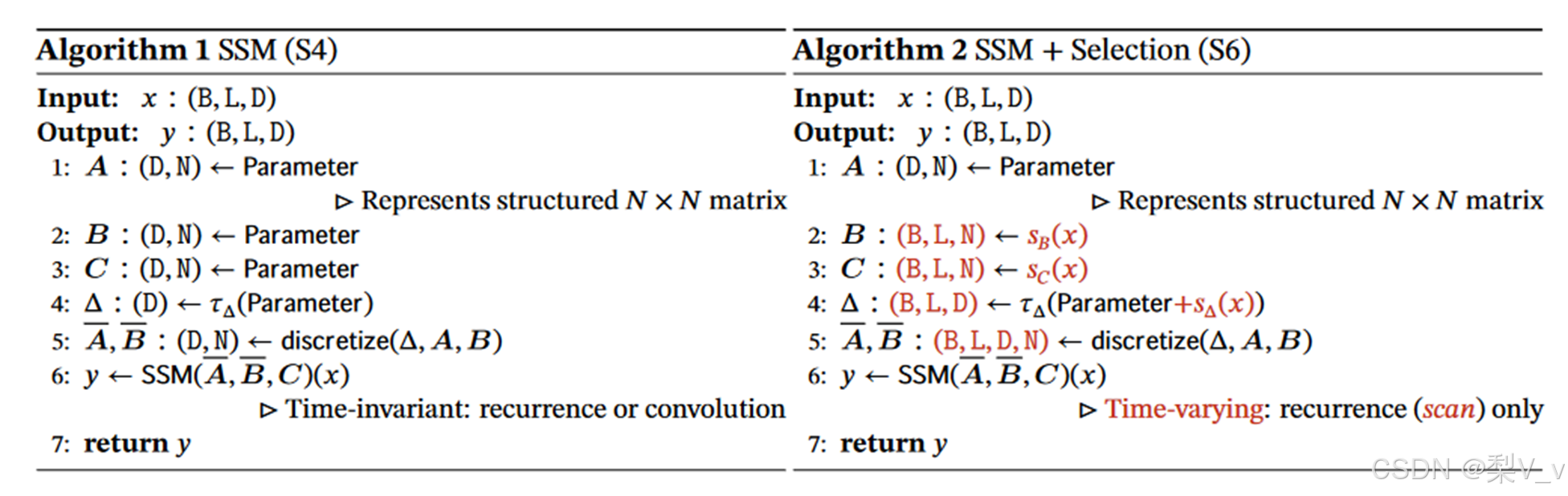
将几个参数 ∆,B,C 设置为输入函数,并在整个过程中改变张量形状。这些参数现在都有一个长度维度 L ,意味着模型已经从时间不变变为时间可变。
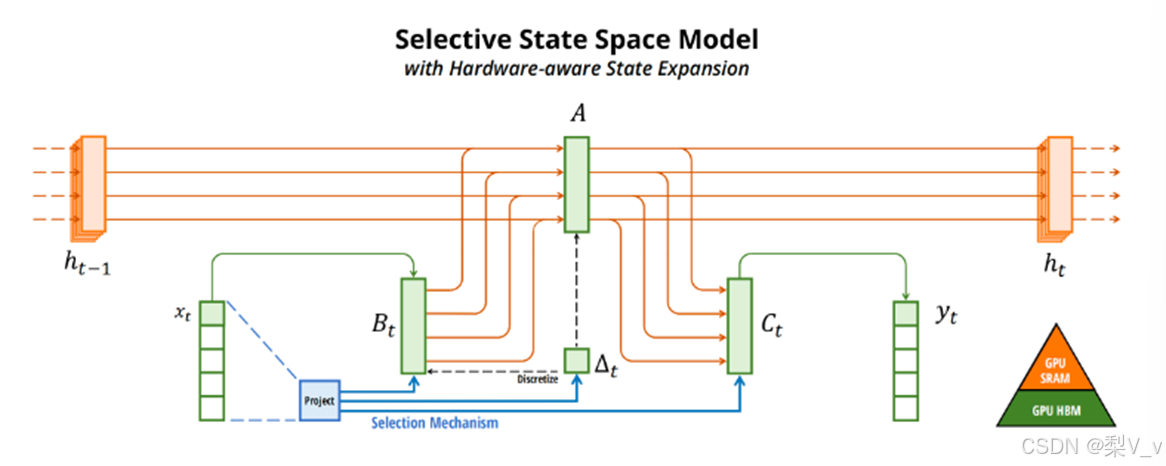
Mamba:从S4到S6的算法变化流程
从S4到S6的过程中 影响输入的𝐵矩阵、影响状态的𝐶矩阵的大小从原来的(D,N)变成了(B,L,N)
这三个参数分别对应batch size、sequence length、hidden state size
且Δ的大小由原来的D变成了(B,L,D),意味着对于一个 batch 里的每个 token (总共有 BxL 个)都有一个独特的Δ
Mamba通过合并输入的序列长度和批量大小,使得矩阵B和C以及步长Δ都取决于输入。
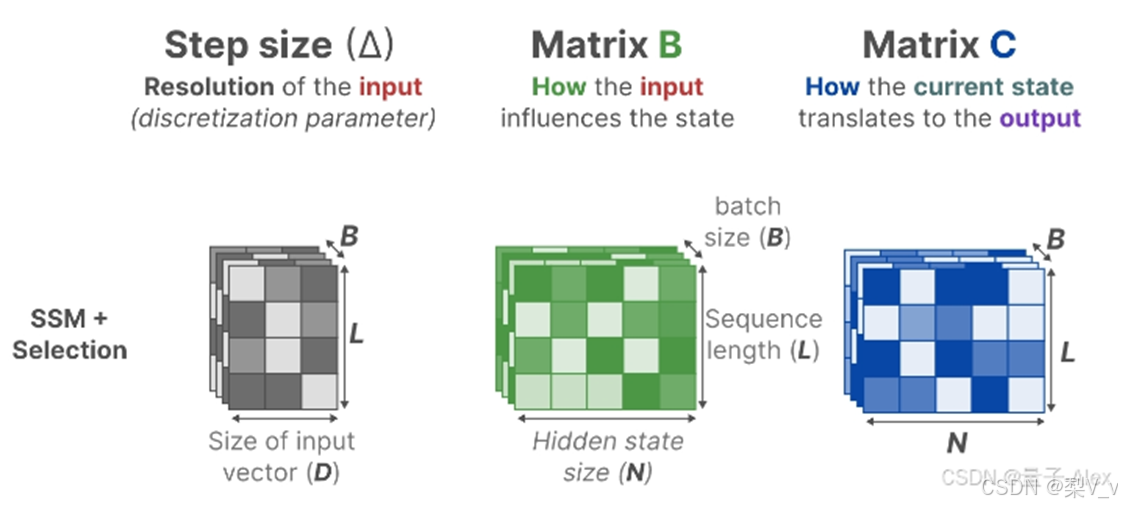
这意味着对于每个输入标记,我们现在有不同的B和C矩阵,可以解决内容感知问题!
虽然𝐴没有变成data dependent,但是通过SSM的离散化操作之后,(𝑨,𝑩) (¯A,¯B) 会经过outer product变成(B, L, N, D)的data dependent张量,算是以一种parameter efficient的方式来达到data dependent的目的
简言之,A离散化之后 𝑨¯A=exp(ΔA) , Δ 的“输入数据依赖性”能够让整体的 𝑨¯A 与输入相关
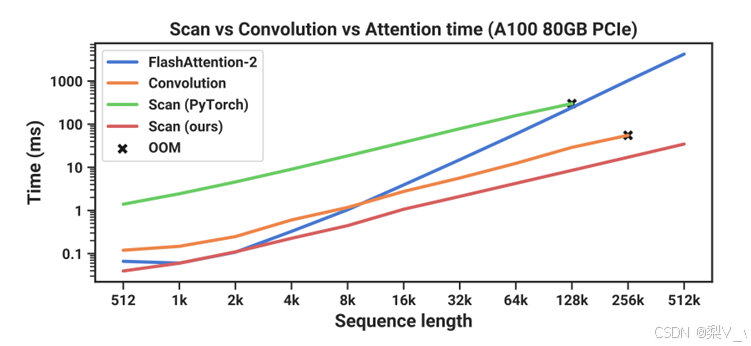
2.硬件感知的设计
并行扫描(parallel scan)且借鉴Flash Attention
如之前所述,由于A B C这些矩阵现在是动态的了,因此无法使用卷积表示来计算它们(CNN需要固定的内核),因此,我们只能使用循环表示,如此也就而失去了卷积提供的并行训练能力
扫描操作
Mamba通过并行扫描(parallel scan)算法使得最终并行化成为可能,其假设我们执行操作的顺序与关联属性无关
因此,我们可以分段计算序列并迭代地组合它们,即动态矩阵B和C以及并行扫描算法一起创建选择性扫描算法(selective scan algorithm)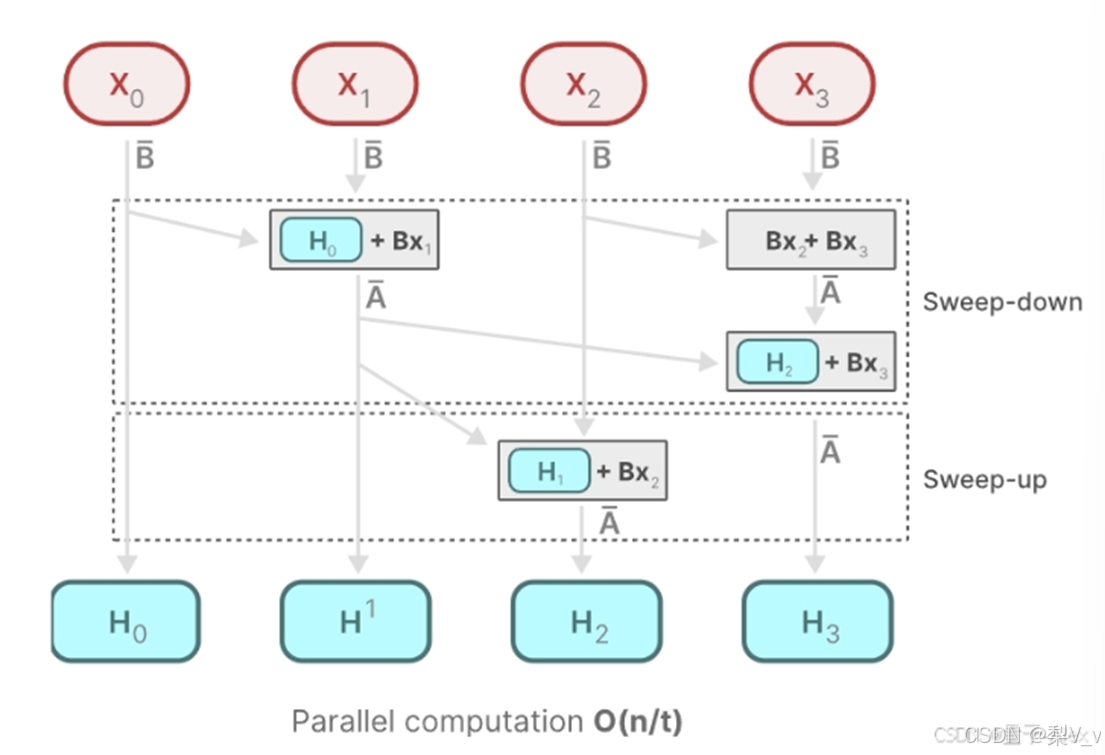
在并行计算中,时间复杂度 O(n/t) 中的 t ,通常代表用于执行任务的处理器或计算单元的数量
核融合
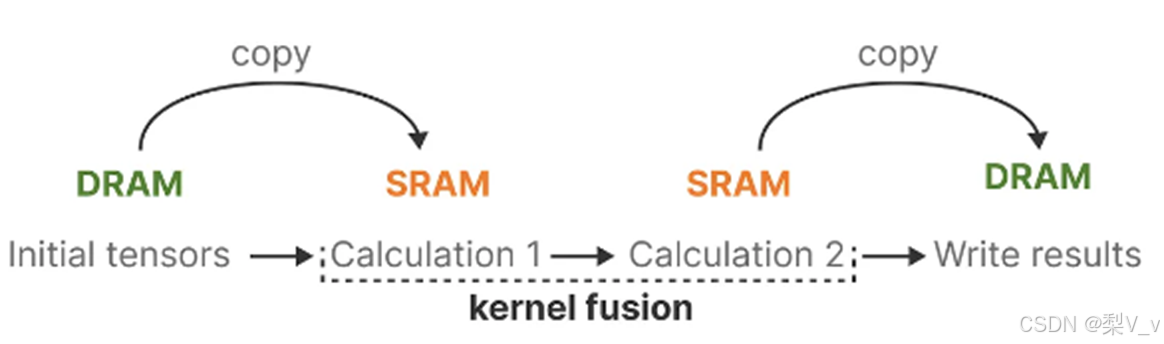
最新 GPU 的一个缺点是其小型但高效的 SRAM 与大型但效率稍低的 DRAM 之间的传输 (IO) 速度有限。在 SRAM 和 DRAM 之间频繁复制信息成为瓶颈。

Flash Attention技术
利用内存的不同层级结构处理SSM的状态,减少高带宽但慢速的HBM内存反复读写这个瓶颈
具体而言,就是限制需要从 DRAM 到 SRAM 的次数(通过内核融合kernel fusion来实现),避免一有个结果便从SRAM写入到DRAM,而是待SRAM中有一批结果再集中写入DRAM中,从而降低来回读写的次数
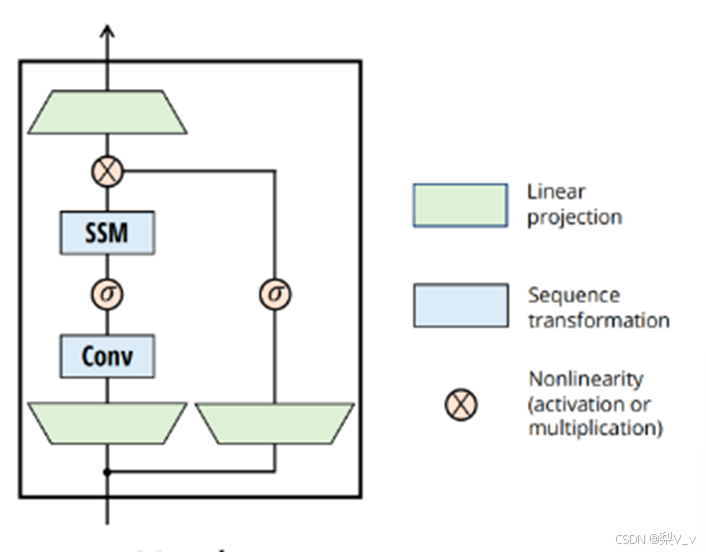
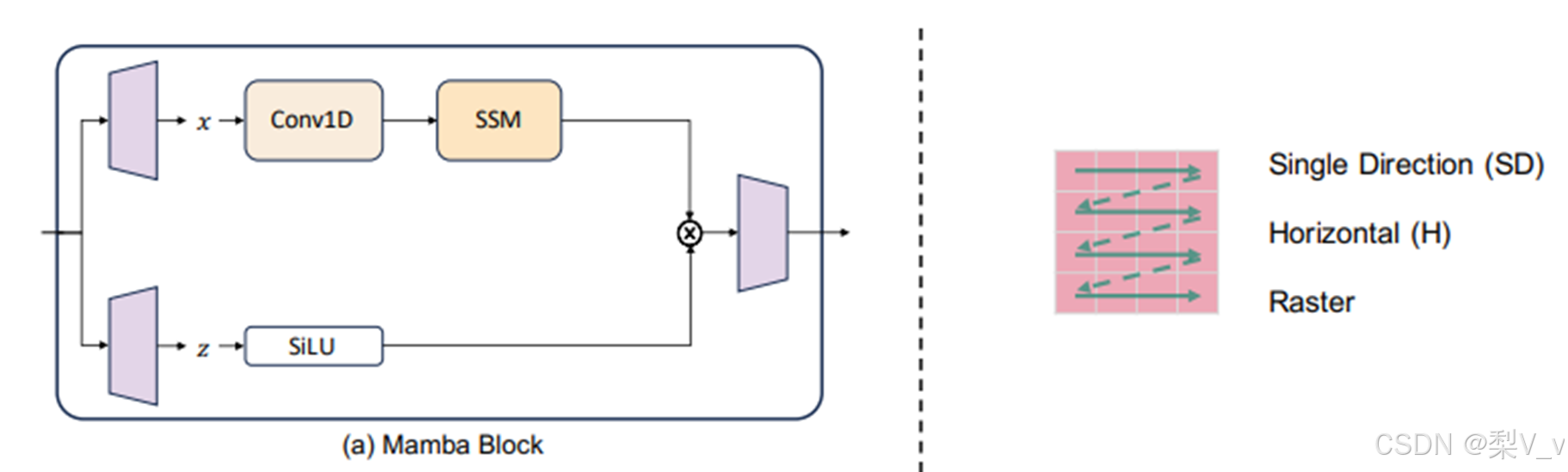
3.The Mamba Block
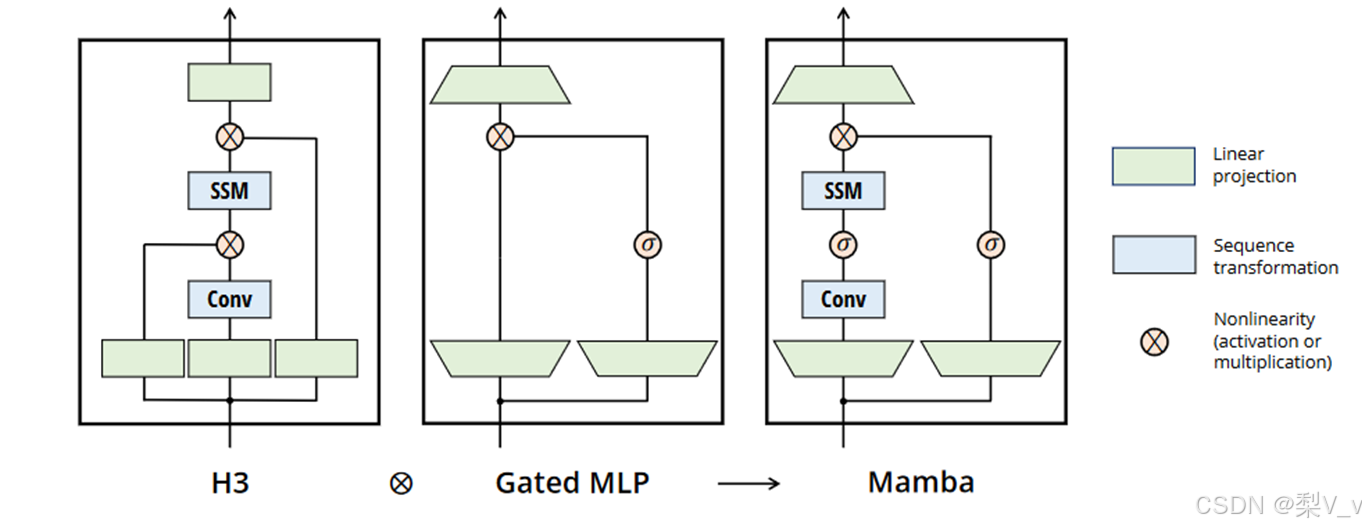
将大多数SSM架构比如H3的基础块,与现代神经网络比Transformer中普遍存在的门控MLP相结合,组成新的Mamba块,重复这个块,与归一化和残差连接结合,便构成了Mamba架构
为何要做线性投影?
经过线性投影后,输入嵌入的维度可能会增加,以便让模型能够处理更高维度的特征空间,从而捕获更细致、更复杂的特征
为什么SSM前面有个卷积?
SSM之前的CNN负责提取局部特征(因其擅长捕捉局部的短距离特征),而SSM则负责处理这些特征并捕捉序列数据中的长期依赖关系,两者算互为补充
02.mamba的应用实例与一般性的实验结果
通过mamba预测下一个token的示例
首先进行线性投影以扩展输入嵌入,然后,在应用选择性 SSM之前先进行卷积
最后,包含归一化层和用于选择“预测的token”的softmax
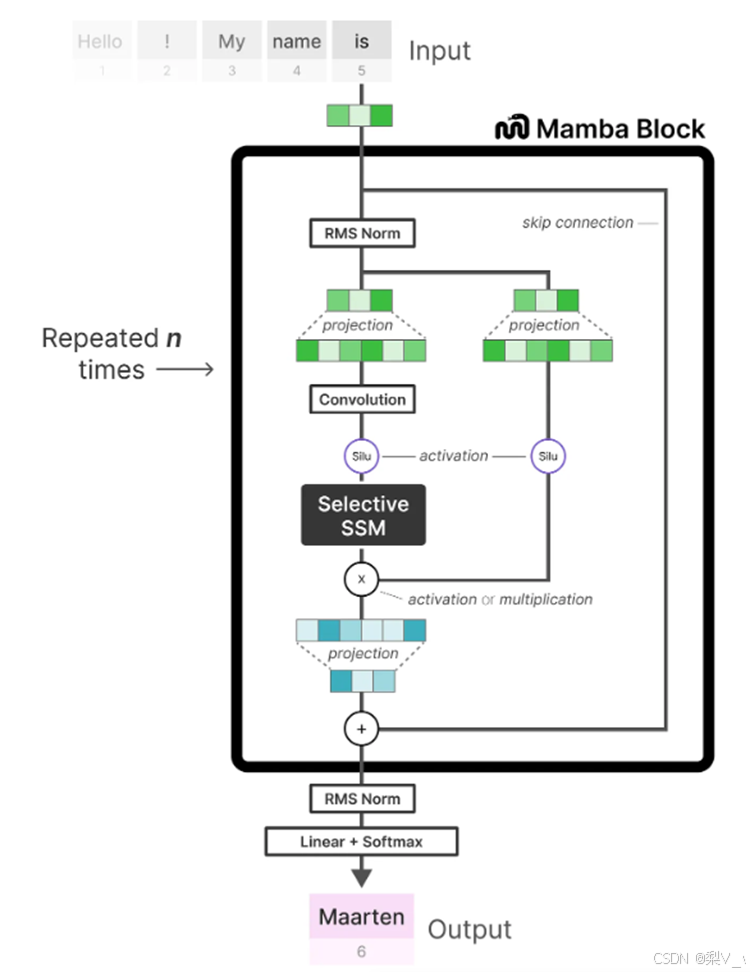
其中的“选择性SSM(即Selective SSM)”具有以下属性:
ØRecurrent SSM通过离散化创建循环SSM
ØHiPPO对矩阵A进行初始化A以捕获长程依赖性
Ø选择性扫描算法(Selective scan algorithm)选择性压缩信息
三个任务的对比:coping、selective copying、induction heads
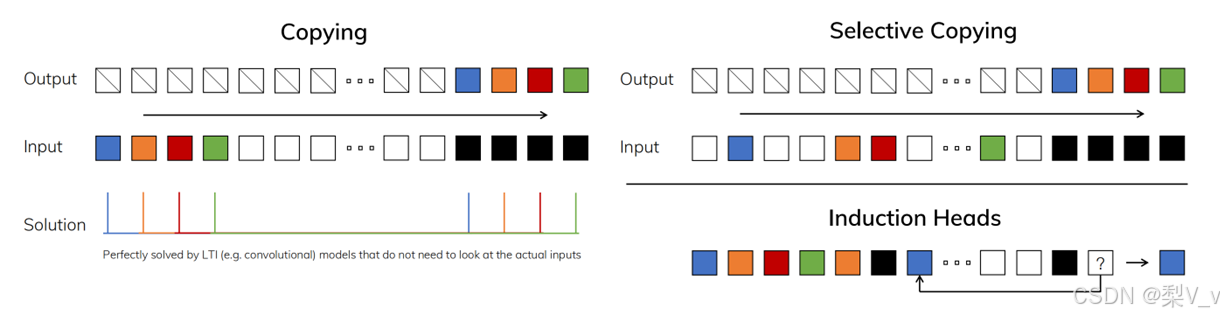
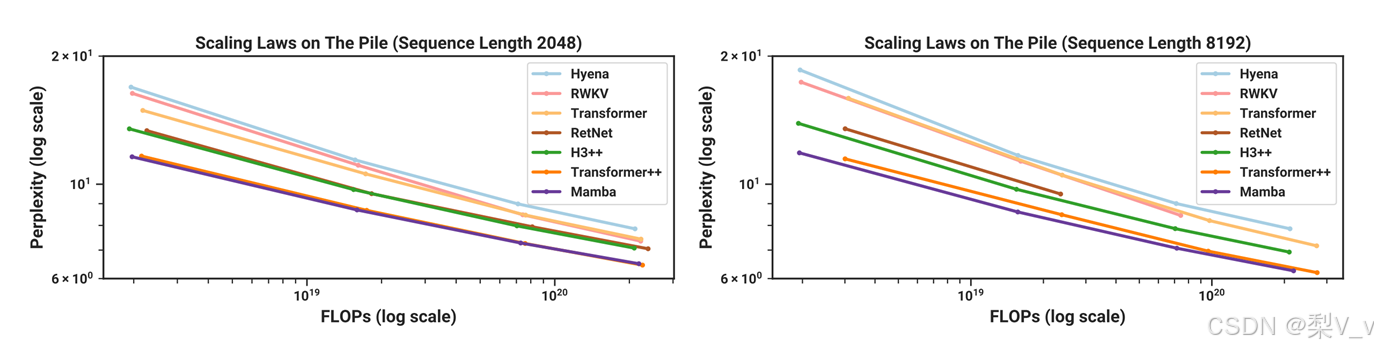
实验结果
03 Mamba模型的应用潜力
几种具有代表性的视觉 Mamba 主干网络,以阐明将 Mamba 应用于 CV 的基本原理和创新。
Pure Mamba
Vim:
是一种基于Mamba的架构,直接在图像块序列上操作,类似于Vision Transformer(ViT)。输入图像首先被转换为展平的2D块,然后通过线性投影层进行向量化,并添加位置嵌入以保留空间信息。Vim块是一个Mamba块,它集成了一个向后的SSM路径以及向前的一个。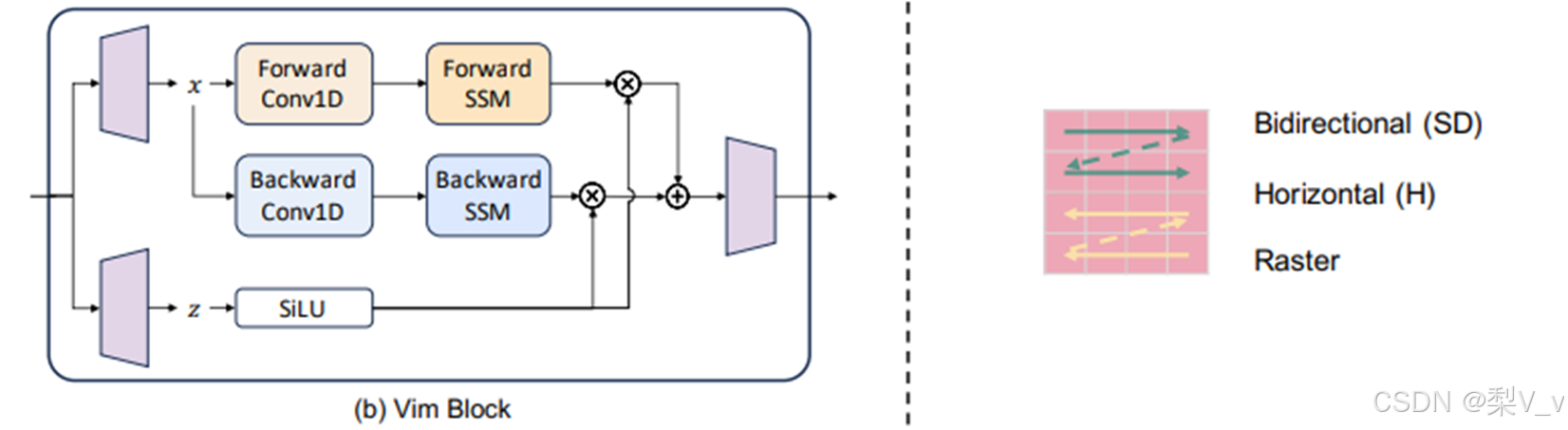
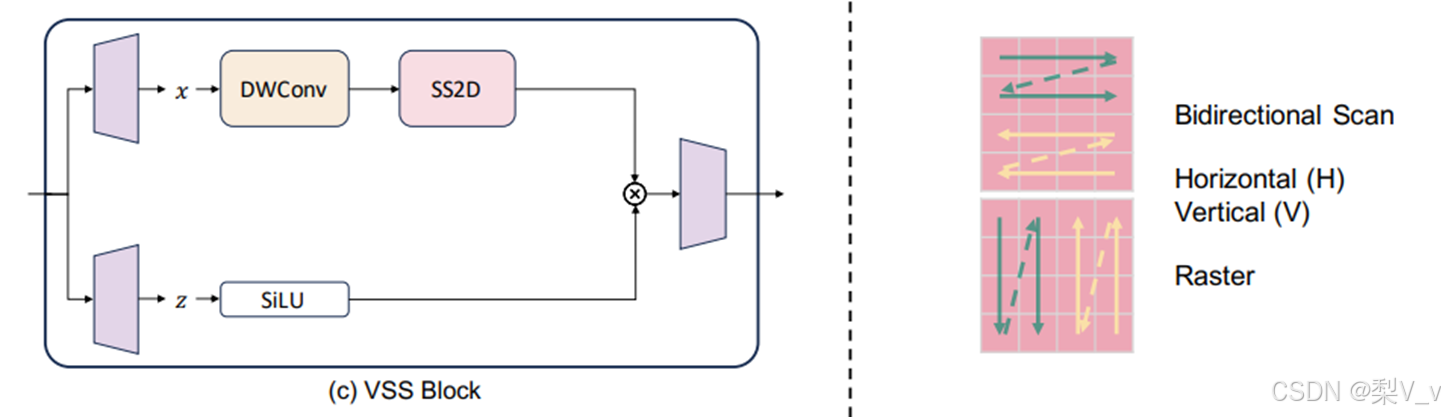
VMamba:
VMamba用于解决将Mamba应用于2D图像时遇到的两个挑战:由Mamba选择机制的1D和因果属性引起的问题。VMamba引入了一个CrossScan Module (CSM),使用双向扫描模式和水平及垂直扫描轴。该模块将输入图像沿水平和垂直轴转换为块序列,并沿四个方向扫描这些序列。
Mamba-ND
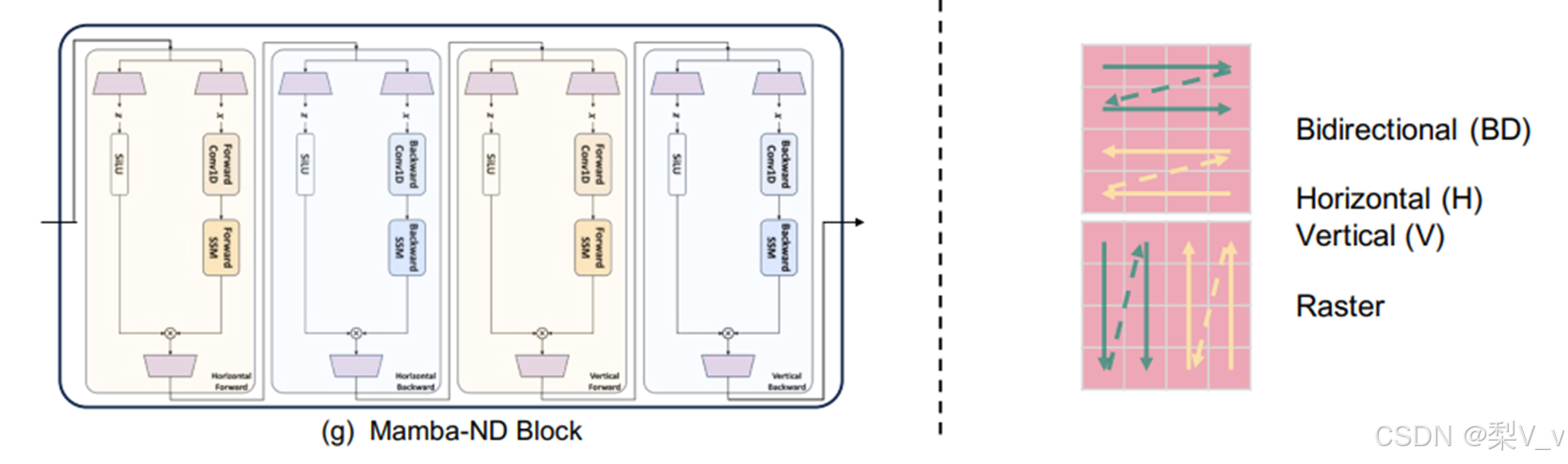
Mamba-ND:
Mamba-ND旨在将Mamba扩展到包括图像和视频在内的多维数据。它将1D Mamba层视为一个黑盒,并探索如何解开和排序多维数据。Mamba-ND主要解决数据缺乏预定义排序同时具有固有空间维度的挑战。
PlainMamba
PlainMamba:
PlainMamba被设计为一个非层次化的架构,以满足多个目标,例如促进多级特征融合、有效融合多模态数据、提供更好的泛化能力,以及优化硬件加速。PlainMamba块类似于Mamba块,但是使用了2D深度卷积层来替代1D卷积层,并且调整了选择性扫描机制以适应2D图像。

Hybrid Mamba
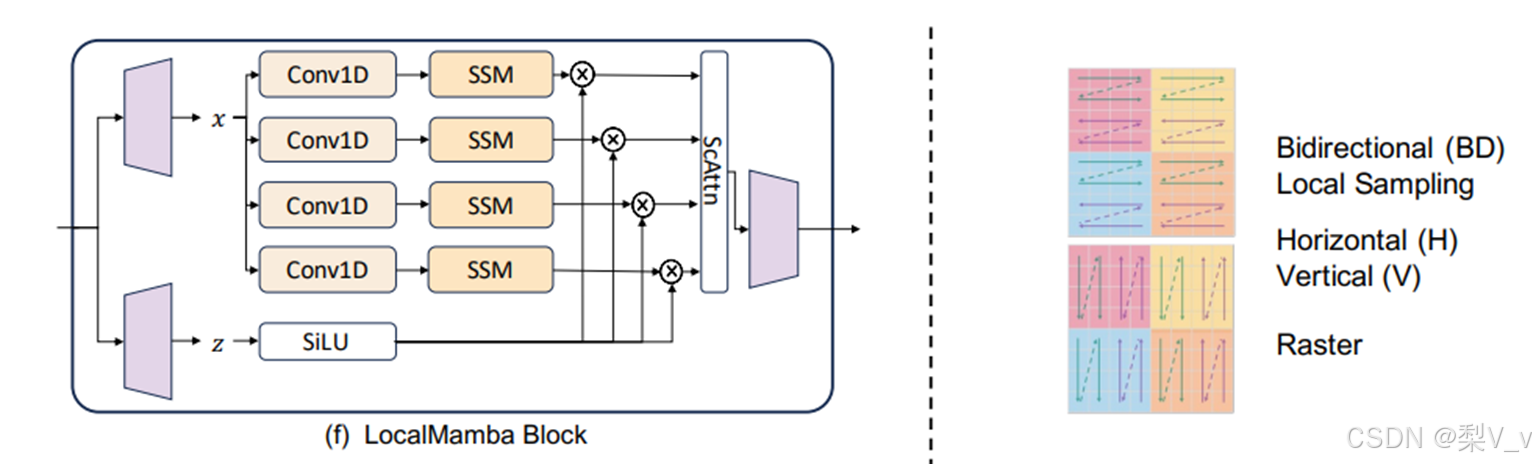
LocalMamba:
LocalMamba解决了Vim和VMamba模型中观察到的一个重大限制,即在单一扫描过程中空间局部性令牌之间的依赖关系被破坏。LocalMamba将输入图像划分为多个局部窗口,并在不同的方向上执行SSM,同时保持全局SSM操作。
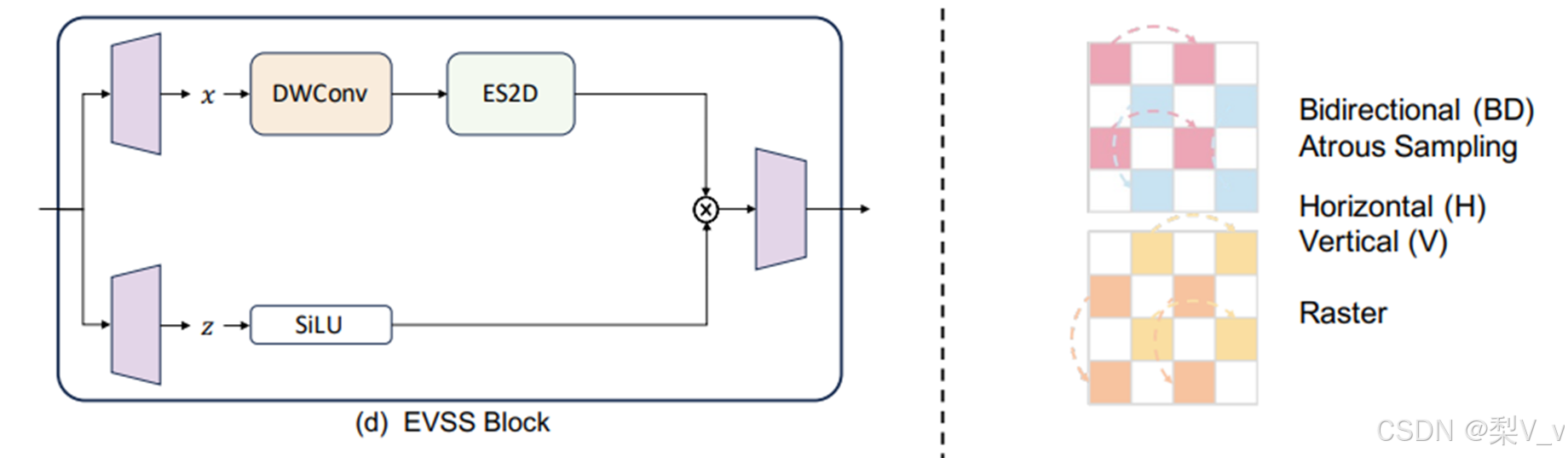
EfficientVMamba:
EfficientVMamba引入了高效的2D扫描(ES2D)技术,该技术使用特征图上的块的空洞采样来减少计算负担。ES2D用于提取全局特征,同时并行的卷积分支用于提取局部特征。
Mamba作为一种新型的长序列建模架构,在多个计算机视觉领域展现出了卓越的性能和高效的计算实现。

















 2989
2989

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









