






 本文介绍了如何在gym的CartPole-v1环境中应用DQN算法,包括环境描述、状态和动作定义、经验回放机制、策略选择(ϵ-greedy)、目标网络的作用以及模型结构(MLP)。还详细讨论了超参数设置及其对训练的影响。
本文介绍了如何在gym的CartPole-v1环境中应用DQN算法,包括环境描述、状态和动作定义、经验回放机制、策略选择(ϵ-greedy)、目标网络的作用以及模型结构(MLP)。还详细讨论了超参数设置及其对训练的影响。
1.环境介绍
环境是用的gym中的CartPole-v1,就是火柴棒倒立摆。需要提前安装gymnasium。
import gymnasium as gymstate:状态观测值有四个,就是小车的位置,即小车的位置,速度,倾斜角度和角度的变化速度。当位置和角度倾斜超出范围,则环境终止。
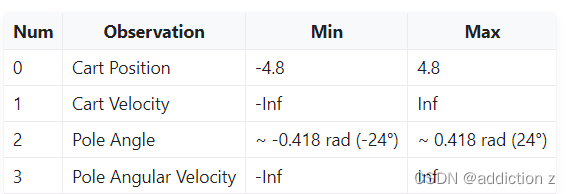
这里返回一个{ndarray{4,}}的类型,分别代表小车的位置,速度,角度,和角度变化率。
![]()
action:环境的动作是一维的,能取两个值0和1。取0代表把小车往左移动,取1代表把小车往右边移动。env.step(action)表示执行动作,函数会返回下一个状态st+1,奖励值reward,以及环境终止符done。
env.step(0)#小车往左
env.step(1)#小车往右reward: 环境的奖励设置是每个时步下能维持杆不到就给一个 +1 的奖励,因此理论上在最优策略下这个环境是没有终止状态的,因为最优策略下可以一直保持杆不倒。但是基于 TD 的算法都必须要求环境有一个终止状态,所以在这里设置了一个环境的最大步数,超出最大步数则done=true。
常用代码:
导入库:import gymnasium as gym
创造环境:env = gym.make('env_name')
重置环境,并返回一个状态:state, info = env.reset(seed)
2.DQN
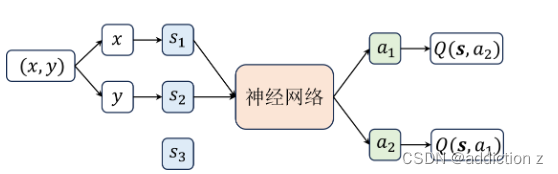
DQN使用神经网络来近似值函数,即神经网络的输入是state s,输出是Q(s,a),∀a∈AQ(s,a),∀a∈A (action space)。通过神经网络计算出值函数后,DQN使用ϵ−greedy策略来输出action。值函数网络与ϵ−greedy策略之间的联系是这样的:首先环境会给出一个obs,智能体根据值函数网络得到关于这个obs的所有Q(s,a)。环境接收到此action后会给出一个奖励reward及下一个obs。这是一个step。此时我们根据reward去更新值函数网络的参数。接着进入下一个step。如此循环下去,直到我们训练出了一个好的值函数网络。
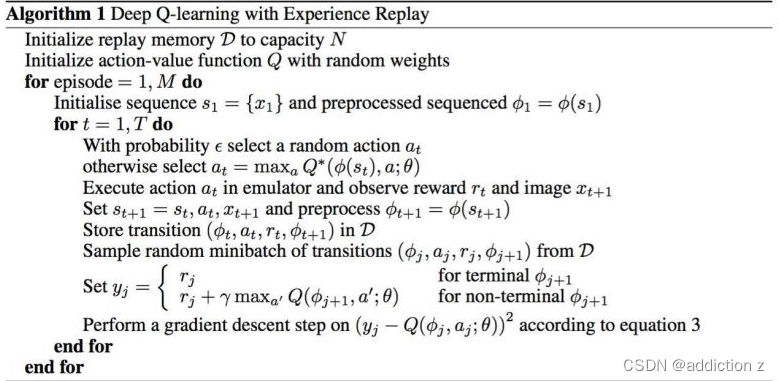
以下是DQN算法的伪代码:
2.1经验回放
采用经验回放的原因:
1所有的四元组(st,at,rt,st+1)在用完之后就丢掉了,造成经验的浪费。(实际上这里代码保存的是五元组,还有环境的终止符done,因为DQN在估计Q值的时候需要用到这个终止符)

2.t时刻的四元组为(st,at,rt,st+1),更新策略的时候,st和st+1有很强相关性,这种相关性实际上是有害的,我们希望打散这种相关性,从而使得训练效果更好。
class ReplayBuffer(object):
def __init__(self, capacity: int) -> None:
self.capacity = capacity
self.buffer = deque(maxlen=self.capacity)
def push(self,transitions):
''' 存储transition到经验回放中
'''
self.buffer.append(transitions)
def sample(self, batch_size: int, sequential: bool = False):
if batch_size > len(self.buffer): # 如果批量大小大于经验回放的容量,则取经验回放的容量
batch_size = len(self.buffer)
if sequential: # 顺序采样
rand = random.randint(0, len(self.buffer) - batch_size)
batch = [self.buffer[i] for i in range(rand, rand + batch_size)]
return zip(*batch)
else: # 随机采样
batch = random.sample(self.buffer, batch_size)
return zip(*batch)
def clear(self):
''' 清空经验回放
'''
self.buffer.clear()
def __len__(self):
''' 返回当前存储的量
'''
return len(self.buffer)经验回放有很多写法,这里用的是一个双端队列。
2.2ϵ−greedy策略
贪心动作总是最大化眼前的收益,不去尝试。ϵ−greedy选择以ϵ概率随机尝试,剩下的概率贪心来选取动作。非常简单的平衡探索(Explotation)和利用(Exploitation)的思想是通过确保整个过程随机来实现的。实际上就是随机和贪心相结合。在前期增强了探索增加探索性,后期减少探索增加训练稳定性。
举个例子,机器去学一个未知的东西,它用一个复杂的方法完成了它,但是呢它故步自封不去采取新的方案,一直以为那个方案好,这就是陷入了局部最优,前期没有探索就只会在一个很局限的区域去选择固定的狭隘方案,难以得到好的训练效果。同样的,后期探索多就得不到一个稳定的训练成果。
def sample_action(self,state):#采样动作
self.sample_count+=1
self.epsilon = self.epsilon_end + (self.epsilon_start - self.epsilon_end) * \
math.exp(-1. * self.sample_count / self.epsilon_decay)
if random.random()>self.epsilon:
with torch.no_grad():
state=torch.tensor(state,device=self.device,dtype=torch.float32).unsqueeze(dim=0)
q_values=self.policy_net(state)
action=q_values.max(1)[1].item()#用训练好的策略选取最大Q的动作
else:
action=random.randrange(self.action_dim)#随机选取动作
return action2.3目标网络
DQN算法通过缩小当前Q值和目标Q值之间的loss来更新网络:
如果当前有个小批量样本导致模型对 Q 值进行了较差的过估计,如果接下来从经验回放中提取到的样本正好连续几个都这样的,很有可能导致 Q 值的发散。
因此引入了一个目标网络:
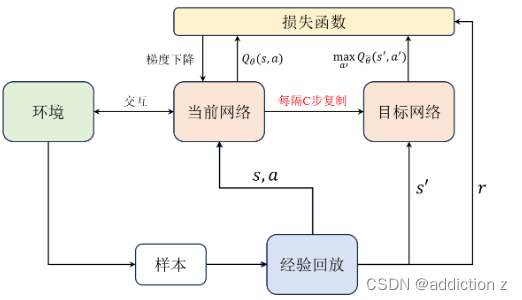
目标网络和当前网络结构都是相同的,都用于近似 Q 值,在实践中每隔若干步才把每步更新的当前网络参数复制给目标网络,这样做的好处是保证训练的稳定,避免 Q 值的估计发散。这个技巧其实借鉴了 Double DQN 算法中的思路。
这里的目标网络好比公司的CEO,因为要对当前Q值做出比较合理的估计(提供给手下较为正确的命令),所以他不能着急做决策,需要先收集手下给的各个情报,在手下收集了若干步的情报后再去改变自己的策略,以便能对手下发出更好的号令来更新手下的策略。
2.4模型结构
采用的是MLP前馈神经网络,输入一个状态维度的张量,返回一个动作维度的张量,输出张量的每一个维度代表那个动作的q值。
class MLP(nn.Module):
def __init__(self,state_dim,action_dim,hidden_dim=128):
super(MLP,self).__init__()
self.fc1=nn.Linear(state_dim,hidden_dim)
self.fc2=nn.Linear(hidden_dim,hidden_dim)
self.fc3=nn.Linear(hidden_dim,action_dim)
def forward(self,x):
x=F.relu(self.fc1(x))
x=F.relu(self.fc2(x))
return self.fc3(x)模型结构要根据实际情况去选,我见过的强化学习模型用的比较多的是MLP模型。此外卷积模型常用于图像分类,因为图像返回一个多维的张量(height*weight*3,3是rgb图像的特征),可以更好处理图像信息。
2.5网络训练
def train(cfg, env, agent):
''' 训练
'''
print("开始训练!")
rewards = [] # 记录所有回合的奖励
steps = []
for i_ep in range(cfg.train_eps):
ep_reward = 0 # 记录一回合内的奖励
ep_step = 0
state, info = env.reset(seed = cfg.seed) # 重置环境,返回初始状态
for _ in range(cfg.max_steps):
ep_step += 1
action = agent.sample_action(state) # 选择动作
next_state, reward, terminated, truncated , info = env.step(action) # 更新环境,返回transition
agent.memory.push((state, action, reward, next_state, terminated)) # 保存transition
state = next_state # 更新下一个状态
agent.update() # 更新智能体
ep_reward += reward # 累加奖励
if terminated:
break
if (i_ep + 1) % cfg.target_update == 0: # 智能体目标网络更新
agent.target_net.load_state_dict(agent.policy_net.state_dict())
steps.append(ep_step)
rewards.append(ep_reward)
if (i_ep + 1) % 10 == 0:
print(f"回合:{i_ep+1}/{cfg.train_eps},奖励:{ep_reward:.2f},Epislon:{agent.epsilon:.3f}")
print("完成训练!")
env.close()
return {'rewards':rewards}在每个训练回合里:不断通过ϵ−greedy策略来选取动作直到环境返回done,但因为这里训练到后期环境并不会返回done,设置了一个max_steps=200,执行200次动作后自动返回done。奖励的计算是在一个回合中执行的所有动作的奖励和。
此外训练的频率是每执行一个动作训练一次,以下是训练的代码:
def update(self):
if len(self.memory)<self.batch_size:#经验回放中不满足一个批量时,不更新策略
return
state_batch,action_batch,reward_batch,next_state_batch,done_batch=self.memory.sample(self.batch_size)
#将数据转换为tensor
state_batch=torch.tensor(np.array(state_batch),device=self.device,dtype=torch.float)
action_batch=torch.tensor(action_batch,device=self.device).unsqueeze(1)
reward_batch = torch.tensor(reward_batch, device=self.device, dtype=torch.float)
next_state_batch = torch.tensor(np.array(next_state_batch), device=self.device, dtype=torch.float)
done_batch = torch.tensor(np.float32(done_batch), device=self.device)
q_values = self.policy_net(state_batch).gather(dim=1, index=action_batch) # 计算当前状态(s_t,a)对应的Q(s_t, a)
next_q_values = self.target_net(next_state_batch).max(1)[0].detach() # 计算下一时刻的状态(s_t_,a)对应的Q值
# 计算期望的Q值,对于终止状态,此时done_batch[0]=1, 对应的expected_q_value等于reward
expected_q_values = reward_batch + self.gamma * next_q_values * (1 - done_batch)
loss = nn.MSELoss()(q_values, expected_q_values.unsqueeze(1)) # 计算均方根损失
# 优化更新模型
self.optimizer.zero_grad()
loss.backward()
# clip防止梯度爆炸
for param in self.policy_net.parameters():
param.grad.data.clamp_(-1, 1)
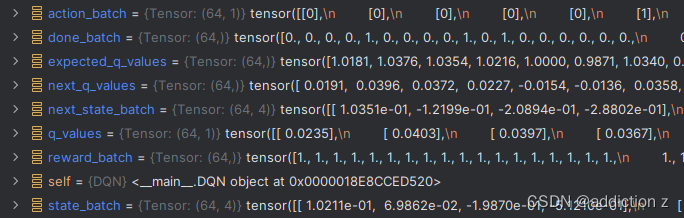
self.optimizer.step()刚从replay buffer中取出来时,state_batch,action_batch,reward_batch,next_state_batch,done_batch都是一个batch_size大小的元组,为了方便训练先要把他们转换为Tensor张量。
state_batch本来是batch_size大小的元组,每个元素都是一个四维的张量,np.array(state_batch)把它转化成一个(batch_size,state_dim)大小的array,再将他转换成tensor(batch_size,state_dim)。
action_batch也是一个batch_size大小的元组每个元素都是一个数字(0或1),代表取的动作。unsqueeze(1)能增加一个维度,确保tensor中每个分量都是tensor而不是一个数。
q_values = self.policy_net(state_batch).gather(dim=1, index=action_batch)代表当前状态对应执行了动作的q值。其中self.policy_net(state_batch)返回一个(batch_size,action_dim)大小的张量,.gather(dim=1, index=action_batch)则从这个张量的第一个维度(列),根据实际执行的action,从action_dim这个维度上选取对应action的q值,最后返回一个(batch_size,1)的值。
next_q_values = self.target_net(next_state_batch).max(1)[0].detach()则是在st+1状态中选取最大值的动作来计算下一个动作的q值。.detach()是分离梯度的操作,pytorch中如果希望这个变量的梯度不被计算,则把它分离出来,这里next_q_values是为了q网络估计出来的q_values更准确,本身梯度不应该被计算,因此这个变量在loss中被看作常数。
各个变量的维度和取值:(batch_size=64,state_dim=4)
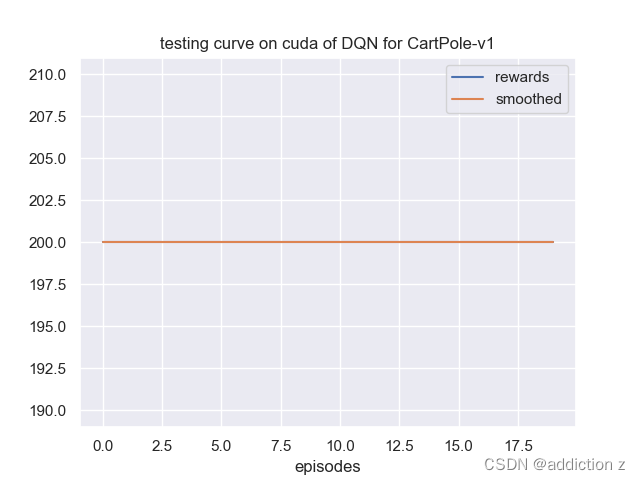
2.5结果
经过100回合的训练,最后模型收敛

并且经过测试,小车已经能稳定在200步的移动中保持不倒:
通过gym提供的rab_array可以把游戏的每一帧保存下来。最后可以通过imageio库来变成动图保存。
import imageio
env = gym.make('CartPole-v1', render_mode='rgb_array')
save_path = 'path'
gif_filename = 'cartpole_rendering.gif'
os.makedirs(save_path, exist_ok=True)
frames = []#设置动图的帧列表
# 重置环境
state,info= env.reset(seed = cfg.seed)
for step in range(cfg.max_steps):
# 渲染当前帧
render_frame = env.render()
frames.append(render_frame)
action = agent.predict_action(state)
next_state, reward, terminated, truncated, info = env.step(action) # 更新环境,返回transition
state = next_state # 更新下一个状态
# 如果游戏结束,退出循环
if terminated:
break
imageio.mimsave(os.path.join(save_path, gif_filename), frames)动图效果如下,可以看到小车已经可以在设定的步数内保持平衡了!
2.6超参数
超参数的设置如下。通过测试,batch_size,gamma(微小改动的影响也很大),episilon的设置,目标网络更新频率对模型的训练都有很大的影响。
class Config:
def __init__(self) -> None:
self.algo_name = 'DQN' # 算法名称
self.env_id = 'CartPole-v1' # 环境id
self.seed = 1 # 随机种子,便于复现,0表示不设置
self.train_eps = 100 # 训练的回合数
self.test_eps = 20 # 测试的回合数
self.max_steps = 200 # 每个回合的最大步数,超过该数则游戏强制终止
self.gamma = 0.95 # 折扣因子
self.epsilon_start = 0.95 # e-greedy策略中初始epsilon
self.epsilon_end = 0.01 # e-greedy策略中的终止epsilon
self.epsilon_decay = 500 # e-greedy策略中epsilon的衰减率
self.memory_capacity = 100000 # 经验回放池的容量
self.hidden_dim = 256 # 神经网络的隐藏层维度
self.batch_size = 64 # 批次大小
self.target_update = 4 # 目标网络的更新频率
self.lr = 0.0001 # 学习率
self.device = torch.device("cuda" if torch.cuda.is_available() else "cpu") # 检测gpu
















 757
757

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









