







目录
二、Exceptions, Traps, and Interrupts
mtvec(Machine Trap-Vector Base-Address)
mepc(Machine Exception Program Counter)
往期文章传送门
开发一个RISC-V上的操作系统(一)—— 环境搭建_riscv开发环境_Patarw_Li的博客-CSDN博客
开发一个RISC-V上的操作系统(二)—— 系统引导程序(Bootloader)_Patarw_Li的博客-CSDN博客
开发一个RISC-V上的操作系统(三)—— 串口驱动程序(UART)_Patarw_Li的博客-CSDN博客
开发一个RISC-V上的操作系统(四)—— 内存管理_Patarw_Li的博客-CSDN博客
开发一个RISC-V上的操作系统(五)—— 协作式多任务_Patarw_Li的博客-CSDN博客
本节的代码在仓库的 04_Trap 目录下,仓库链接:riscv_os: 一个RISC-V上的简易操作系统
本文代码的运行调试会在前面开发的RISC-V处理器上进行,仓库链接:cpu_prj: 一个基于RISC-V指令集的CPU实现
一、控制流 (Control Flow)和 Trap
控制流(Control Flow)
- branch(条件分支指令),jump(无条件跳转指令),由程序正常自主控制。
异常控制流(Exceptional Control Flow,简称ECP)
- exception(异常),interrupt(中断),不在程序的控制范围内。
在 RISC-V 中把异常控制流统称为 Trap。

二、Exceptions, Traps, and Interrupts
在RISC-V官方手册的描述中:
- 异常(exception)指的是当前hart中运行的某条指令发生了一个非正常情况(unusual condition),如除法指令的除数为0,非法指令等。
- 中断(interrupt)则被描述为一个可能导致hart经历意外的控制转移的外部异步事件。
- 陷阱(trap)指的是由异常或中断引起的,到陷阱处理程序(trap handler)的控制转移。
这里我翻译的可能不太准确,下面是官方手册的英文版描述:
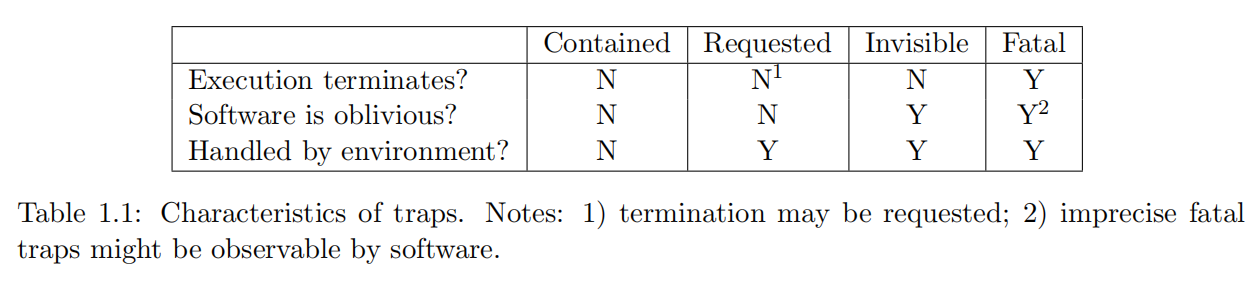
 从在执行环境中运行的软件的角度来看,hart 在运行时遇到的 trap 可能有四种不同的类型,官方的描述如下:
从在执行环境中运行的软件的角度来看,hart 在运行时遇到的 trap 可能有四种不同的类型,官方的描述如下:
Contained Trap
这类 trap 对执行环境中的软件可见,并且也由软件处理,如 user 模式下使用 ECALL 进行控制转移。

Requested Trap
这类 trap 是一个同步异常(synchronous exception),它是对执行环境的显式调用,代表执行环境中的软件请求操作,如系统调用(system call)。

Invisible Trap
执行环境会透明地(transparently)处理此类 trap(这里的透明地的意思是执行环境看不见,或者是意识不到这类 trap 的执行),并在处理后正常恢复执行(execution resume)。如缺页异常(page faults)。

Fatal Trap
这类 trap 一般代表发生了致命性的错误,会导致执行环境终止执行。

下表展示了各类 trap 的特征:
异常和中断的异同
一般来说,异常为当前执行的指令发生了“不正常的情况”,如除法指令的除数为0、缺页异常等等,异常发生后会跳转执行异常处理程序,视情况决定是否跳回发生异常的指令继续执行,如缺页异常在执行完缺页处理程序后会跳转到原指令继续执行,而非法指令引起的异常则不会跳回原指令继续执行。
而中断则是在当前执行流中发生了某个外部事件,需要暂停当前执行流去处理这个外部事件,和异常一样,处理完后也要视情况决定是否返回原执行流继续执行,但是中断一般是跳回发生中断的下一条指令继续执行,除了某些多周期指令被中断后需要重新执行,如除法指令。

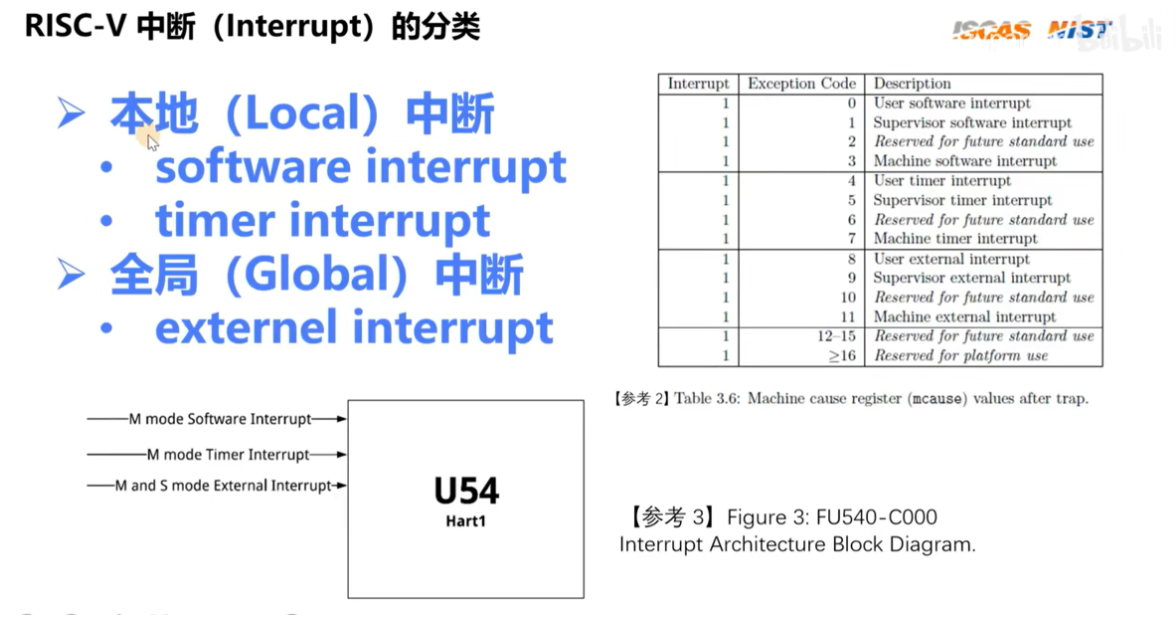
中断又分本地(Local)中断和全局(Global)中断,本地中断又分为软件中断和定时器中断 ,系统调用就是一个典型的软件中断;全局中断为外部中断,如 uart、鼠标键盘等外设中断。
但是,站在处理器处理的过程来说,中断与异常其实并没有区别。当中断与异常发生时,处理器的表现形式就是,暂停当前执行的程序,转而执行处理中断或异常的处理程序,处理完后视情况恢复执行之前被暂停的程序。 通常我们所理解的中断与异常都可以被统称为广义上的异常。
广义上的异常被分为两种:
- 同步(synchronous)异常:执行某个程序流,能稳定复现的的异常,能比较精确的确定是那条指令引发的异常。(例如程序流里有一条非法指令,或者是ecall、ebreak指令。属于内因)
- 异步(asynchronous)异常:异常产生的原因与当前的程序流无关,与外部的中断事件有关。(由外部事件引起的,比如由定时器或者uart、鼠标等外设引起的中断。属于外因)
三、RISC-V的异常处理
RISC-V 定义的三种模式 User、Supervisor 和 Machine,均可发生异常。但是只有特权模式 Supervisor 和 Machine 才能处理异常,因为处理异常需要 CSR 寄存器。下面简单介绍一下 trap处理中比较重要的 csr 寄存器。

mtvec(Machine Trap-Vector Base-Address)
mtvec 的高30位 BASE 用来保存发生异常时处理器需要跳转到的地址,其低2位 MODE 用于控制入口函数的地址配置方式,所以基地址 BASE 必须保证四字节对齐。

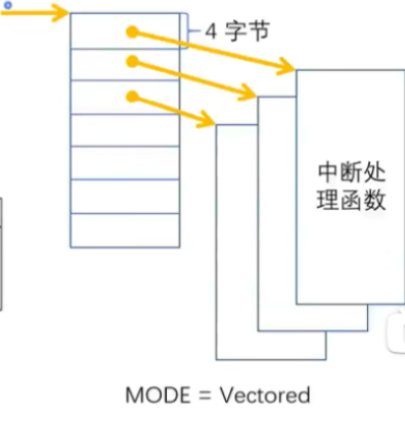
根据 MODE 的配置,入口函数的配置分为 Direct 和 Vectored 两种方式:

Direct:所有的 exception 和 interrupt 发生后都跳转到 BASE 指定的地址处:

Vectored:exception 处理方式同 Direct;但 interrupt 的入口地址以数组方式排列:
mepc(Machine Exception Program Counter)
当 trap 发生时,pc 会被替换为 mtvec 设定的地址,同时 hart 会设置 mepc 为当前指令或者下一条指令的地址,当需要退出 trap 时可以调用特殊的 mret 指令,该指令会将 mepc 中的值恢复到 pc 中,从而实现返回的效果。当我们不想回到发生 trap 的地方执行的时候,我们可以在 trap 处理程序中修改 mepc 的值来达到改变 mret 返回地址的目的。

mcause(Machine Cause)
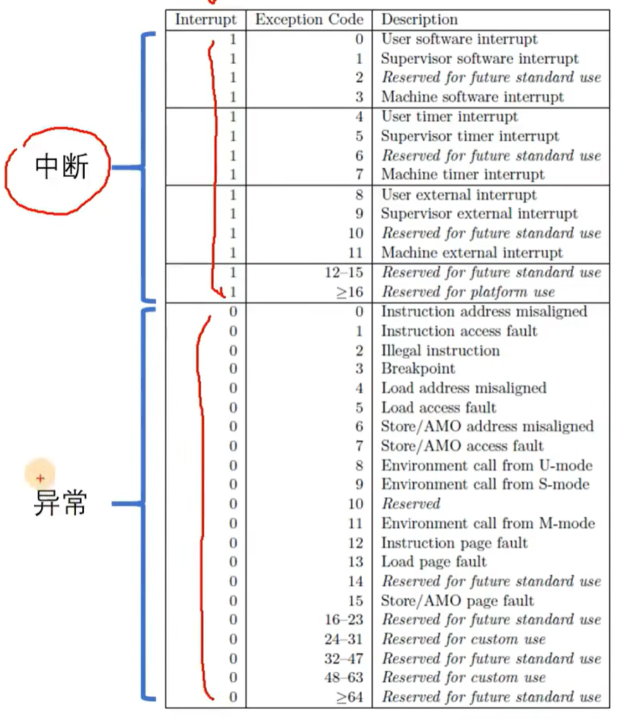
当 trap 发生时,hart 会设置该寄存器通知我们 trap 发生的原因,最高位 Interrupt 为1时说明当前 trap 为 interrupt,否则为 exception。

剩下的 Exception Code 用于标识具体的 interrupt 或 exception 的种类, 如下表:
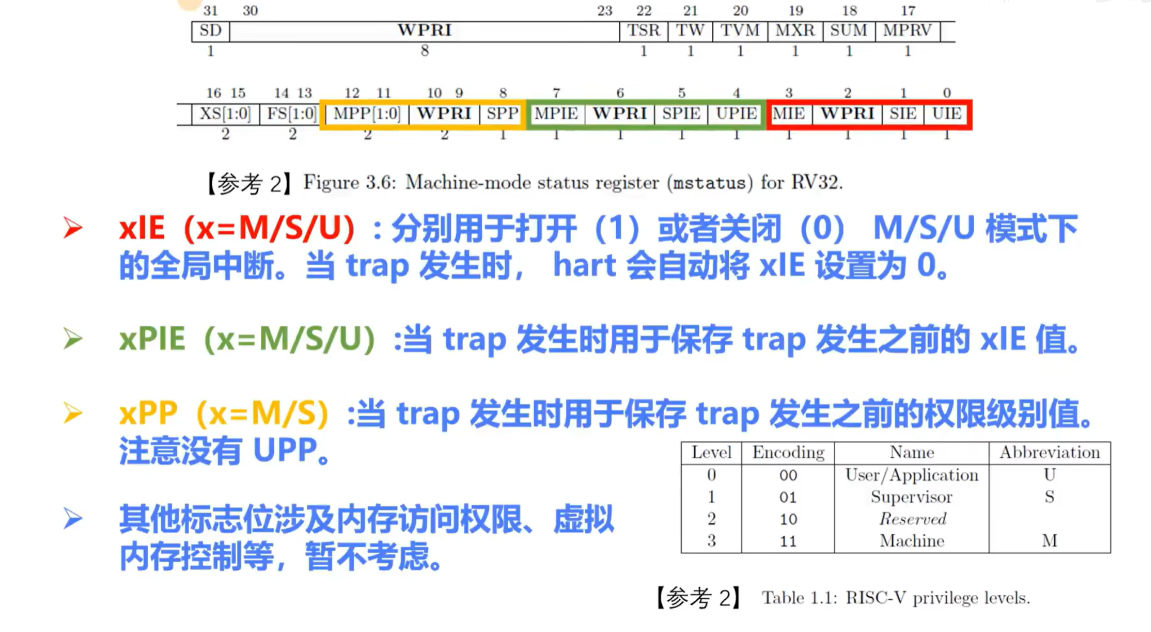
mstatus(Machine Status)
用于跟踪和控制 hart 的状态,xIE(Interrupt Enable)用于打开或关闭对应模式下的全局中断,因为 riscv 默认是不支持嵌套中断的,所以在 trap 发生时,hart 会自动将 xIE 置0来关闭全局中断。xPIE(Previous Interrupt Enable),当 trap 发生时用于保存 trap 发生之前的 xIE 值。
RISC-V Trap 处理流程
在介绍完相关的 csr 寄存器后,接下来介绍一下 RISC-V 处理器在 Trap 发生后的处理流程。
Trap 处理又分为上半部分( Top Half )和下半部分( Bottom Half ):
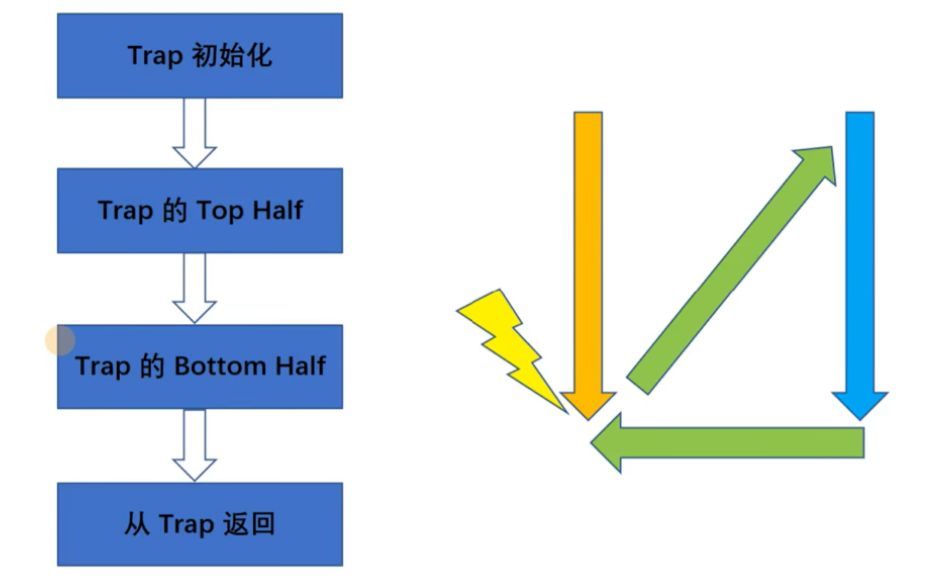
上半部分由硬件执行, 执行流程如下:
- 处理器停止执行当前的程序流。
- 将 Trap 原因记录到 mcause 寄存器中。
- 将 Trap 的返回地址保存到 mepc 寄存器中。
- 将 Trap 发生时的存储器访问地址或者指令编码保存到 mtval 寄存器中。
- 更新 mstatus 状态寄存器(关闭全局中断位xIE,保存当前全局中断状态xIE到xPIE)。
- 最后 PC 跳转到 mtvec 寄存器定义的 BASE 地址开始执行( mtvec 寄存器的设置在 Trap 初始化步骤中完成)。
下半部分由软件执行,执行的程序基地址为 mtvec 寄存器中设置的 BASE 值,执行流程如下:
- 保存当前任务的上下文。
- 根据 mcause 中不同的 Trap 原因,跳转到不同的 Trap Handler 处理程序中执行。
- 从 Trap Handler 函数返回,mepc的值可能会有所调整。
- 恢复之前任务的上下文。
- 使用 mret 指令返回到 Trap 之前的状态。
四、实战
代码的 gitee 仓库如下:
Trap 上半部
在 cpu_prj 仓库的 FPGA/rtl/core/ 目录下的 clint.v 文件中,模块的输入输出引脚定义如下:
input wire clk ,
input wire rst_n ,
input wire[`INST_DATA_BUS] ins_i ,
input wire[`INST_ADDR_BUS] ins_addr_i ,
// from ex
input wire jump_flag_i ,
input wire[`INST_ADDR_BUS] jump_addr_i ,
input wire div_req_i , // 除法操作执行请求信号
input wire div_busy_i , // 除法操作忙信号
// csr读写信号
output reg wr_en_o , // csr write enable
output reg [`INST_ADDR_BUS] wr_addr_o , // csr write address
output reg [`INST_REG_DATA] wr_data_o , // csr write data
output reg [`INST_ADDR_BUS] rd_addr_o , // csr read address
input wire[`INST_REG_DATA] rd_data_i , // csr read data
// from csr
input wire[`INST_REG_DATA] csr_mtvec , // mtvec寄存器
input wire[`INST_REG_DATA] csr_mepc , // mepc寄存器
input wire[`INST_REG_DATA] csr_mstatus , // mstatus寄存器
input wire[`INT_BUS] int_flag_i , // 异步中断信号
output wire clint_busy_o , // 中断忙信号
output reg [`INST_ADDR_BUS] int_addr_o , // 中断入口地址
output reg int_assert_o // 中断标志中断仲裁逻辑代码如下, 首先判断 Trap 类型,是同步还是异步,还是特殊的 mret 指令,mret 指令用于返回到 mepc 中设置的地址,并且还原 mstatus的 内容。
// 中断仲裁逻辑
always @ (*) begin
if (ins_i == `INS_ECALL || ins_i == `INS_EBREAK) begin
// 如果执行阶段的指令为除法指令或者跳转指令,则先不处理同步中断
if (div_req_i != 1'b1 && jump_flag_i != 1'b1) begin
int_state = INT_SYNC_ASSERT;
end
else begin
int_state = INT_IDLE;
end
end
else if (int_flag_i != `INT_NONE && csr_mstatus[3] == 1'b1) begin
int_state = INT_ASYNC_ASSERT;
end
else if (ins_i == `INS_MRET) begin
int_state = INT_MRET;
end
else begin
int_state = INT_IDLE;
end
end根据不同的 Trap 类型,我们对 CSR 寄存器写不同的内容,如果是同步或异步 Trap ,我们要写 mepc、mcause、mstatus 寄存器;如果是 mret 返回指令,则只需要写 mstatus 寄存器。
// 写CSR寄存器状态切换
always @ (posedge clk or negedge rst_n) begin
if (!rst_n) begin
csr_state <= CSR_IDLE;
cause <= `ZERO_WORD;
ins_addr <= `ZERO_WORD;
end
else begin
case (csr_state)
CSR_IDLE: begin
// 同步中断
if (int_state == INT_SYNC_ASSERT) begin
csr_state <= CSR_MEPC;
// 在中断处理函数里会将中断返回地址加4
ins_addr <= ins_addr_i;
case (ins_i)
`INS_ECALL: begin
cause <= 32'd11;
end
`INS_EBREAK: begin
cause <= 32'd3;
end
default: begin
cause <= 32'd10;
end
endcase
end
// 异步中断
else if (int_state == INT_ASYNC_ASSERT) begin
// timer中断
if (int_flag_i == `INT_TIMER) begin
cause <= 32'h80000004;
end
// uart中断,无总裁,目前这部分只用于测试
else if (int_flag_i == `INT_UART_REV) begin
cause <= 32'h8000000b;
end
else begin
cause <= 32'h0000000a;
end
csr_state <= CSR_MEPC;
if (jump_flag_i == 1'b1) begin
ins_addr <= jump_addr_i;
end
// 异步中断可以中断除法指令的执行,中断处理完再重新执行除法指令
if (div_req_i == 1'b1 || div_busy_i == 1'b1) begin
ins_addr <= div_ins_addr;
end
else begin
ins_addr <= ins_addr_i;
end
end
// 中断返回
else if (int_state == INT_MRET) begin
csr_state <= CSR_MSTATUS_MRET;
end
end
CSR_MEPC: begin
csr_state <= CSR_MSTATUS;
end
CSR_MSTATUS: begin
csr_state <= CSR_MCAUSE;
end
CSR_MCAUSE: begin
csr_state <= CSR_IDLE;
end
CSR_MSTATUS_MRET: begin
csr_state <= CSR_IDLE;
end
default: begin
csr_state <= CSR_IDLE;
end
endcase
end
end
// 发出中断信号前,先写几个CSR寄存器
always @ (posedge clk or negedge rst_n) begin
if (!rst_n) begin
wr_en_o <= 1'b0;
wr_addr_o <= `ZERO_WORD;
wr_data_o <= `ZERO_WORD;
end
else begin
case (csr_state)
// 将mepc寄存器的值设为当前指令地址
CSR_MEPC: begin
wr_en_o <= 1'b1;
wr_addr_o <= {20'h0, `CSR_MEPC};
wr_data_o <= ins_addr;
end
// 写中断产生的原因
CSR_MCAUSE: begin
wr_en_o <= 1'b1;
wr_addr_o <= {20'h0, `CSR_MCAUSE};
wr_data_o <= cause;
end
// 关闭全局中断
CSR_MSTATUS: begin
wr_en_o <= 1'b1;
wr_addr_o <= {20'h0, `CSR_MSTATUS};
wr_data_o <= {csr_mstatus[31:4], 1'b0, csr_mstatus[2:0]};
end
// 中断返回
CSR_MSTATUS_MRET: begin
wr_en_o <= 1'b1;
wr_addr_o <= {20'h0, `CSR_MSTATUS};
wr_data_o <= {csr_mstatus[31:4], csr_mstatus[7], csr_mstatus[2:0]};
end
default: begin
wr_en_o <= 1'b0;
wr_addr_o <= `ZERO_WORD;
wr_data_o <= `ZERO_WORD;
end
endcase
end
end最后再发出中断发生信号和跳转地址给EX_UNIT,来将PC的值改变为跳转地址的值,如果是同步或异步 trap ,则跳转地址为 mtvec 中的值;如果是 mret 指令,跳转地址则为 mepc 中的值。
// 发出中断信号给ex模块
always @ (posedge clk or negedge rst_n) begin
if (!rst_n) begin
int_assert_o <= 1'b0;
int_addr_o <= `ZERO_WORD;
end
else begin
case (csr_state)
// 发出中断进入信号.写完mcause寄存器才能发
CSR_MCAUSE: begin
int_assert_o <= 1'b1;
int_addr_o <= csr_mtvec;
end
// 发出中断返回信号
CSR_MSTATUS_MRET: begin
int_assert_o <= 1'b1;
int_addr_o <= csr_mepc;
end
default: begin
int_assert_o <= 1'b0;
int_addr_o <= `ZERO_WORD;
end
endcase
end
endTrap 下半部
源码在 riscv_os 仓库的 04_Traps 目录下,主要是 entry.S 和 trap.c 两个文件。
在 entry.S 汇编文件中定义了 trap_vector 函数,mtvec 寄存器中的值要保存为 trap_vector 函数的地址。大致执行流程为先保存当前任务的上下文,然后调用 trap_handler 函数,并将 mepc 、mcause 寄存器的值作为参数传给它,trap_handler 函数将修改后的mepc的值返回,然后存入 mepc 寄存器中,最后在恢复之前任务的上下文,再使用 mret 指令返回。
trap_vector:
# save context(registers).
csrrw t6, mscratch, t6 # swap t6 and mscratch
reg_save t6
# Save the actual t6 register, which we swapped into
# mscratch
mv t5, t6 # t5 points to the context of current task
csrr t6, mscratch # read t6 back from mscratch
sw t6, 120(t5) # save t6 with t5 as base
# Restore the context pointer into mscratch
csrw mscratch, t5
# call the C trap handler in trap.c
csrr a0, mepc
csrr a1, mcause
call trap_handler
# trap_handler will return the return address via a0.
csrw mepc, a0
# restore context(registers).
csrr t6, mscratch
reg_restore t6
# return to whatever we were doing before trap.
mret在 trap.c 文件中定义了 trap_init() 和 trap_handler() 函数,第一个用于初始化 mtvec 寄存器的内容为 trap_vector 函数的地址,并且开启 mstatus 寄存器中 machine 模式下的全局中断;第二个用于根据不同的 mcause 来进行相应的处理。
void trap_init()
{
/*
* set the trap-vector base-address for machine-mode
*/
w_mtvec((reg_t)trap_vector);
w_mstatus((reg_t)0x88);
}
reg_t trap_handler(reg_t epc, reg_t cause)
{
reg_t return_pc = epc;
reg_t cause_code = cause & 0xfff;
if(cause & 0x80000000) {
/* Asynchronous trap - interrupt */
switch(cause_code) {
case 3:
uart_puts("software interruption!\n");
break;
case 4:
uart_puts("user timer interruption!\n");
break;
case 11:
uart_puts("external interruption!\n");
uart_int_handler();
break;
default:
uart_puts("unknown async exception!\n");
break;
}
} else {
/* Synchronous trap - exception */
printf("cause = %d\n", cause);
uart_puts("OOPS! What can I do!\n");
return_pc = return_pc + 4;
}
//printf("return_pc = %d\n", return_pc);
return return_pc;
}
上板测试
使用 uart 的串口接收中断来模拟异步 trap,下面是 uart 在接收到数据后进行的中断处理函数。
void uart_int_handler(void)
{
char begin_char = uart_getc();
if (begin_char == 'e') {
uart_puts("Input your command, and end with 'Enter':\n");
while (1) {
char c = uart_getc();
uart_putc(c);
if (c == '\n') {
break;
}
}
uart_puts("Received your command!\n");
} else {
uart_puts("Please send 'e' first, then enter your command\n");
}
}
在 user.c 中定义了一个 ebreak 函数来模拟同步 trap 。
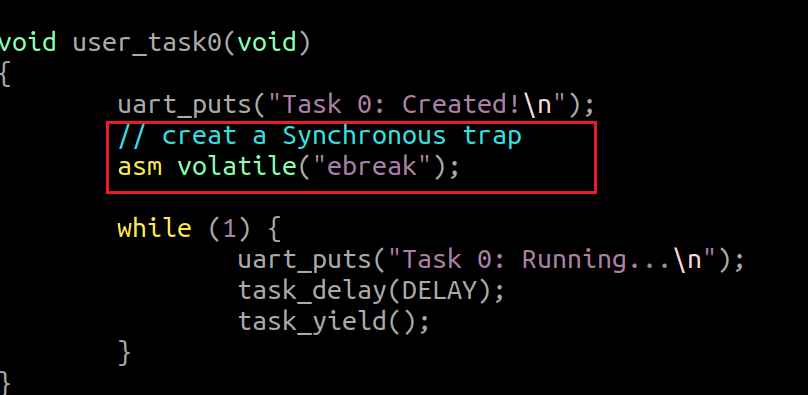
下面将程序 make 编译构建后,烧录到板子上,打开串口调试工具,可以看到如下输出,说明 ebreak 指令成功执行,进入 trap 处理程序执行后返回原来的任务继续执行:

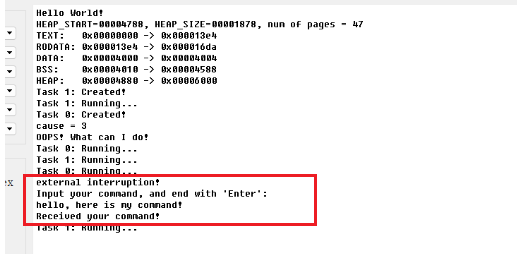
接下来测试 uart 的异步 trap,首先发送字符 e ,可以看到 uart 中断处理程序成功执行,等待用户的进一步输入:
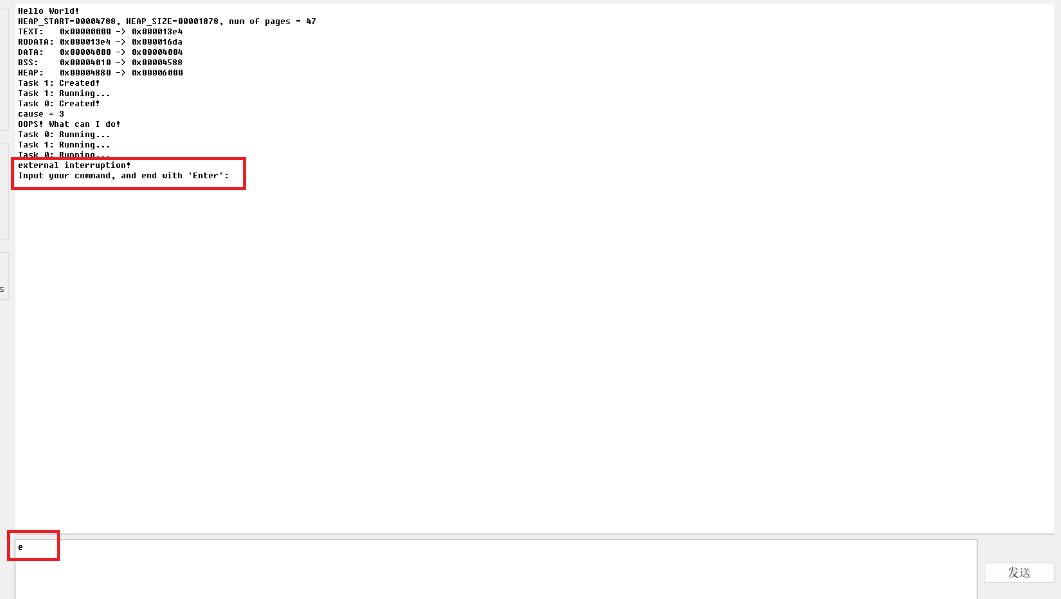
然后输入想要打印的指令,最后一定要加一个回车!!(因为程序中是通过回车来判断结尾的):

点击发送后可以看到指令成功被打印,打印之后程序继续返回原来的 task 继续执行:
至此,trap 的上板实验结束,有了 trap 里面的异常和中断,我们可以进一步实现操作系统里更加高级的功能——定时器中断和系统调用!!
接下来我也会继续更新对应文章,遇到问题欢迎加群 892873718 交流~















 5516
5516











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









