






下载yolo5
GitHub - mats-robotics/yolov5_ros: A complete ROS interface for running YOLOv5 inference
都搞好后开始运行自己的数据集测试一下,大概看一下
source/devel/setup.bash
roslaunch yolov5_ros yolov5.launch运行了一会儿,yolo5会订阅图像话题,根据配置的yaml文件标注出对应的物体的像素框和他们的类型
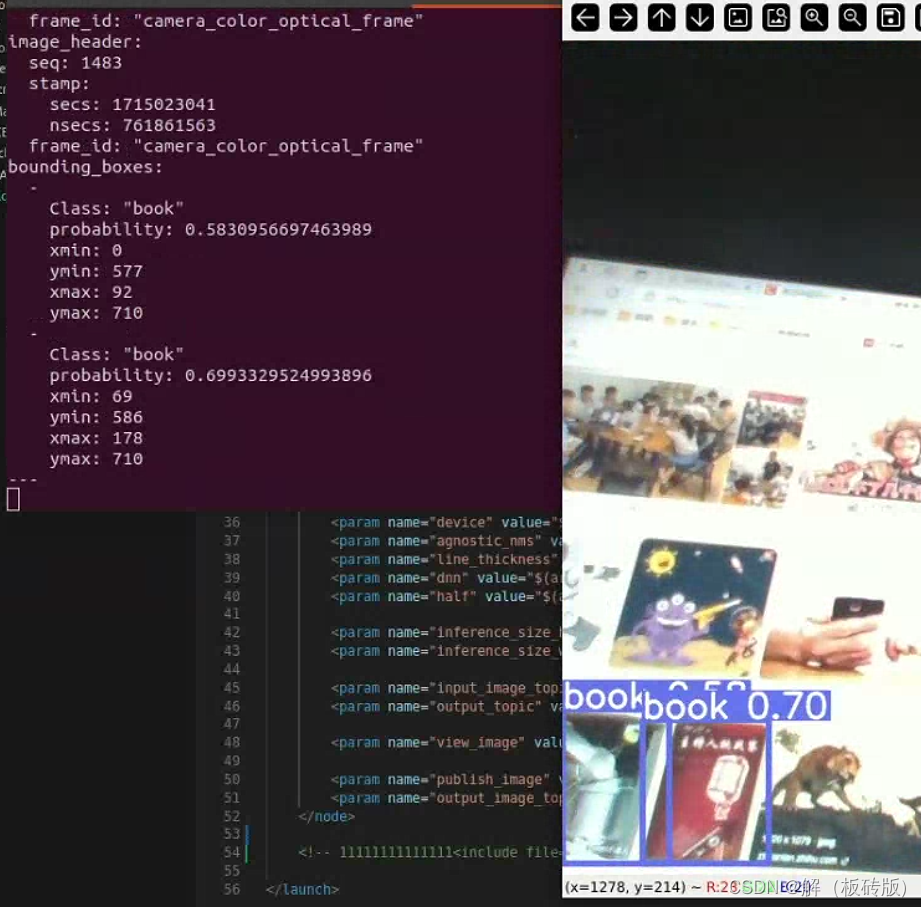
detection_msgs/BoundingBoxes发布的这个话题是包括了
header: ROS 消息的头部,包含了时间戳和坐标系等信息。
image_header: 图像的头部信息。
bounding_boxes: 包含了检测到的多个边界框的数组。
Class: 目标类别。
x, y, width, height: 边界框的位置和大小。
probability: 目标存在的概率想要使用还需要以下改动,先是需要自己生成一个yaml文件(根据自己的需要),然后是使用自己的相机,这里打算先用D435i。
运行
roslaunch realsense2_camera rs_camera.launch在yolo5的launch文件里把find d435i去掉,然后运行
roslaunch yolov5_ros yolov5_d435.launch 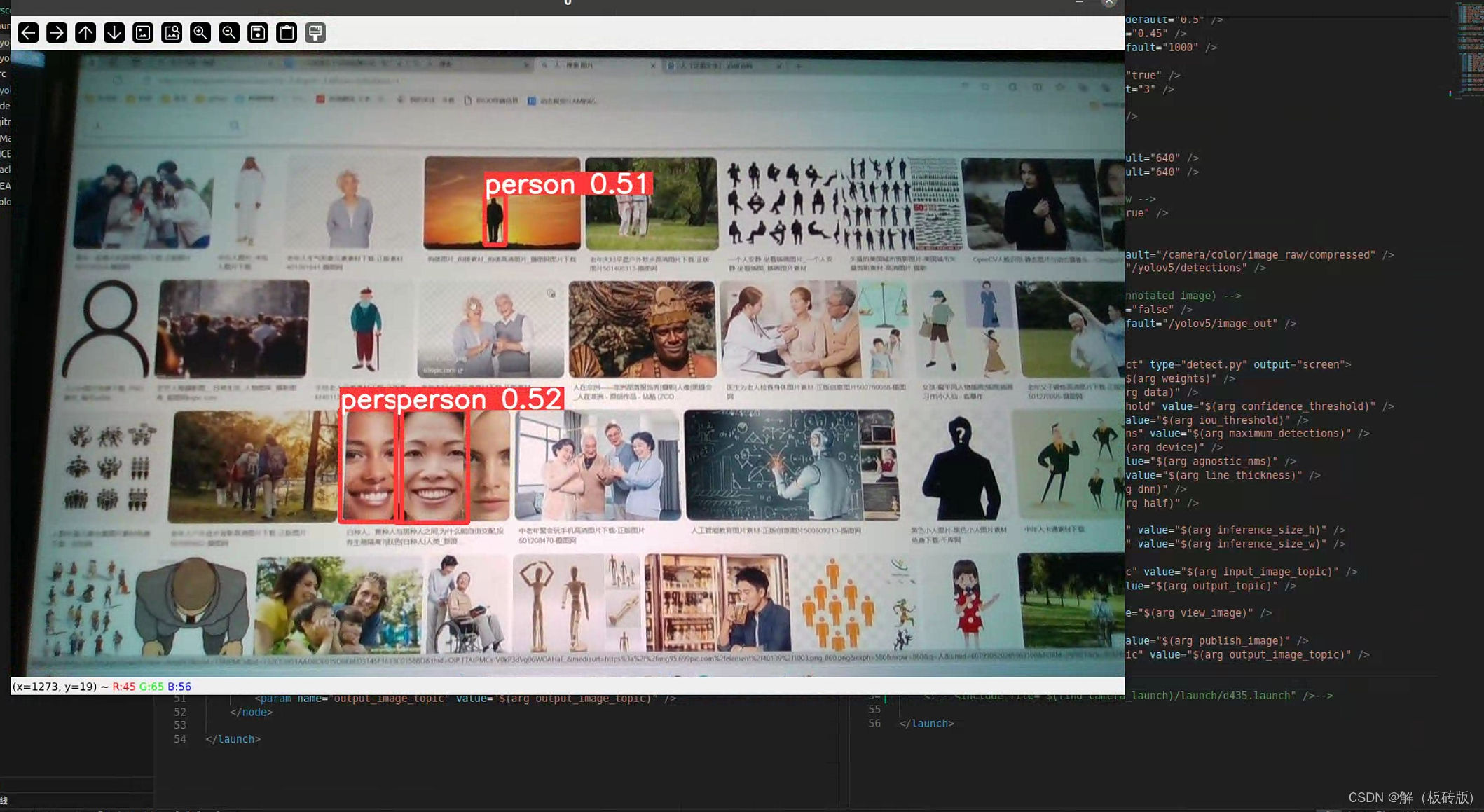
可以正常识别,搞一些水下图片,发现并没有识别,应该是没有对应配置的yaml文件,需要自己生成。
用ros订阅这个话题,需要提前source一下,得到结果如下,会给出具体的框及坐标
yolo生成自己的数据集,参考Ubuntu使用官方Yolov5训练自己的数据集(小白向)_ubuntu 中训练yolov5数据集-CSDN博客
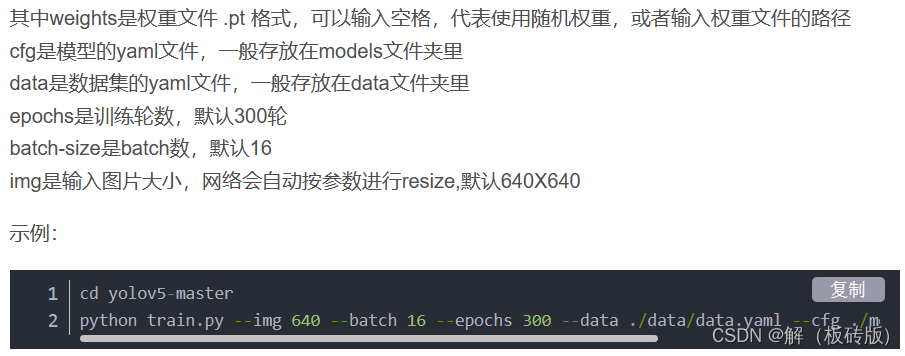
暂时还没有数据集用来训练就先这样了。















 4413
4413

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









