







阴影,光线追踪基本原理
1.阴影贴图(Shadow Mapping)
图形学中阴影的产生原理:对于一个点来说,如果它位于阴影中,则说明摄像机能看到这个点,但是光源无法看到这个点;如果位于阴影外,则说明摄像机能看到这个点,同时光源也能看到这个点。
注:
- Shadow Mapping 只能处理点光源的阴影;
- 产生的为硬阴影(没有平滑过渡);
1.1产生步骤
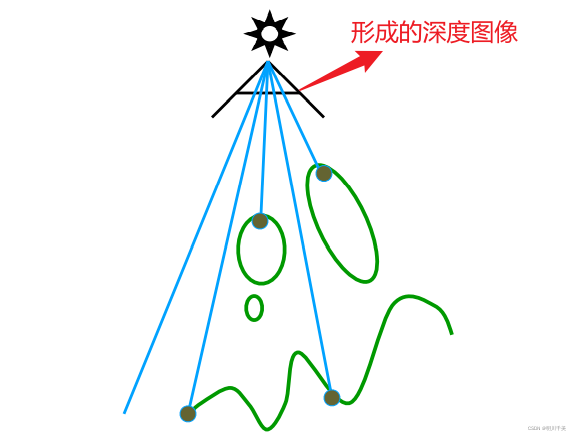
Step1:从光源出处看向物体,进行一次透视投影,只记录下投影后光能看到的点的深度信息(Z-Buffer)
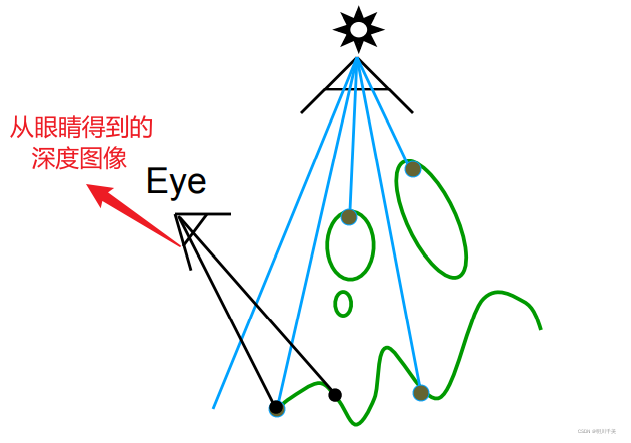
Step2:从真正的相机视角去对当前场景进行透视投影,将相机看到的所有点,全部通重新投影到光源相机上,又会得到一副深度图
Step3:将Step2中生成的深度图像与Step1中生成的深度图像进行比较,看上面记录的点的深度是否一致(一致则说明点光源能看到该点,即该点不在阴影中,可见;反之在阴影中,不可见)
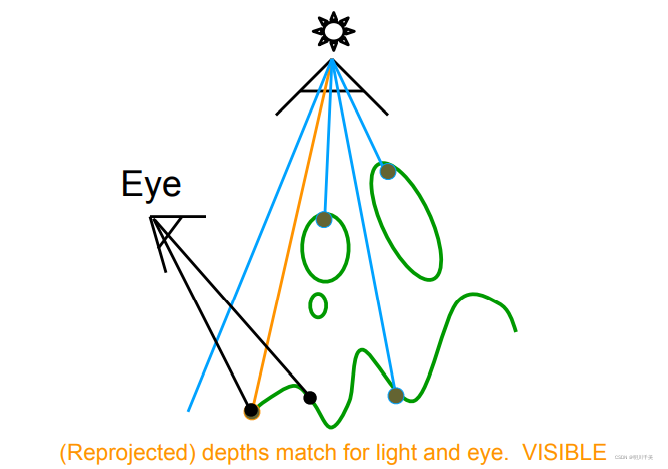
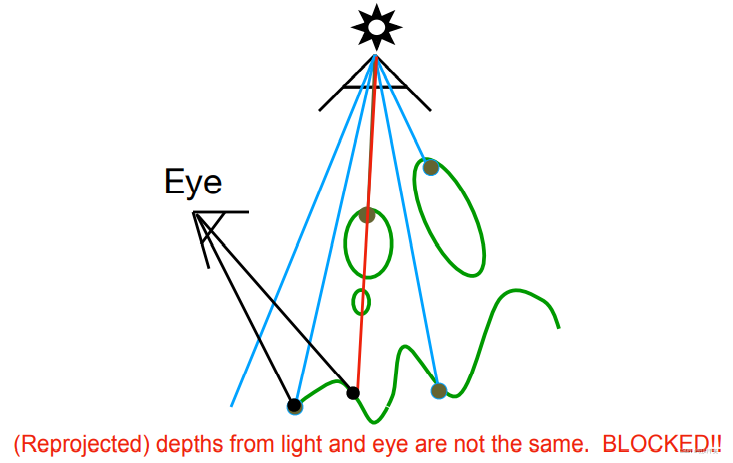
如上图所示,从摄像机投影回光源,进行比较,如橘色线上的点,这点能被光照照射到,就不处于阴影中,可见;而红线上的点就被判定处于阴影中,不可见。
1.2存在问题
1)计算结果均为浮点数,不宜比较是否相等,一般通过让两个浮点数做差,结果小于某个极小的数就认为这两个浮点数相等;
2)由于要求的是点光源,而点光源不存在大小,产生的为硬阴影,不符合实际中的阴影,真实的如下图的第二张图所示,称为软阴影;
3)阴影贴图也是贴图的一种,阴影贴图的分辨率和实际渲染的分辨率如果不匹配,即纹理分辨率过大或过小引起的问题,如锯齿和摩尔纹。
2.光线追踪( Ray Tracing)
2.1为什么需要光线追踪?
1)光栅化并不能很好的处理全局影响,如下图所示的几种反射:

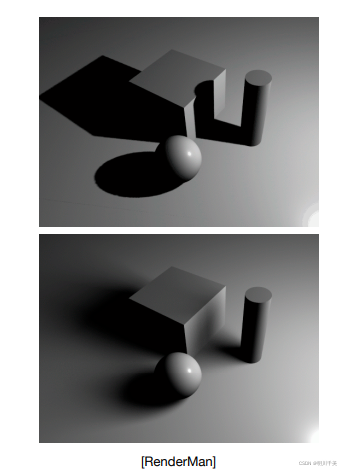
2)虽然光栅化处理很快,但质量较低,如下图所示:

3)由于光线追踪生成速度非常缓慢,一般用于制作动画视频时使用,而光栅化一般使用于实时场景渲染:

2.2基础光线追踪算法(Basic Ray-Tracing Algorithm)
三个思想基础:
- 光总是沿直线传播的
- 光线与光线之间不会发生碰撞
- 光线的可逆性,即光线到达眼睛后,眼睛发出的光同样能返回光源
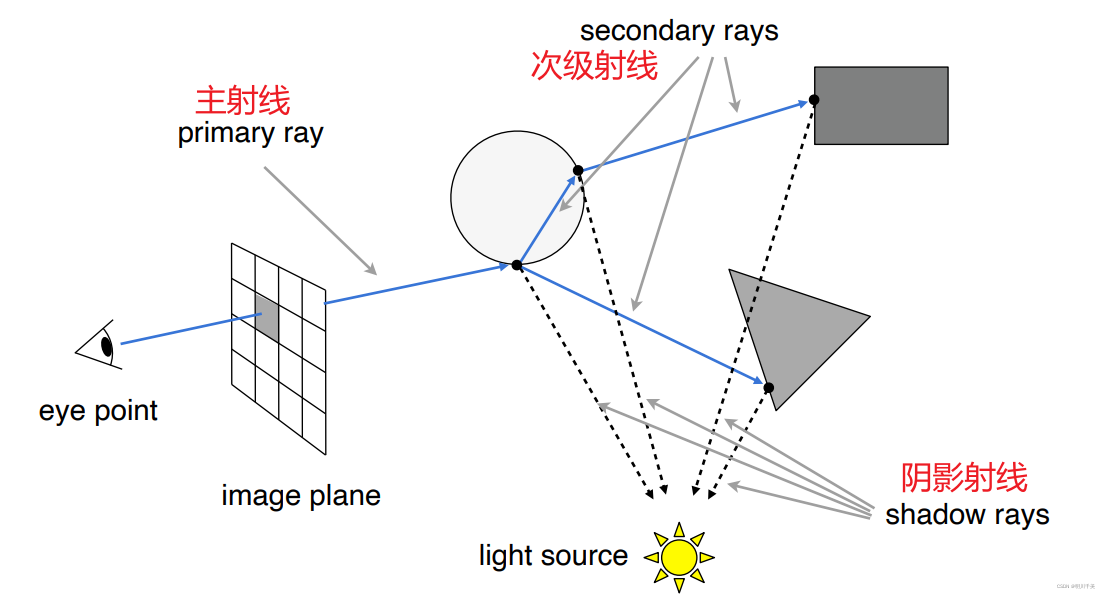
基础光线追踪的过程:
Step1:从摄像机看向物体,类似发出光线(eye ray),首先穿过图像平面(image plane,透视投影中的近平面),直到最初接触到某个物体的表面;
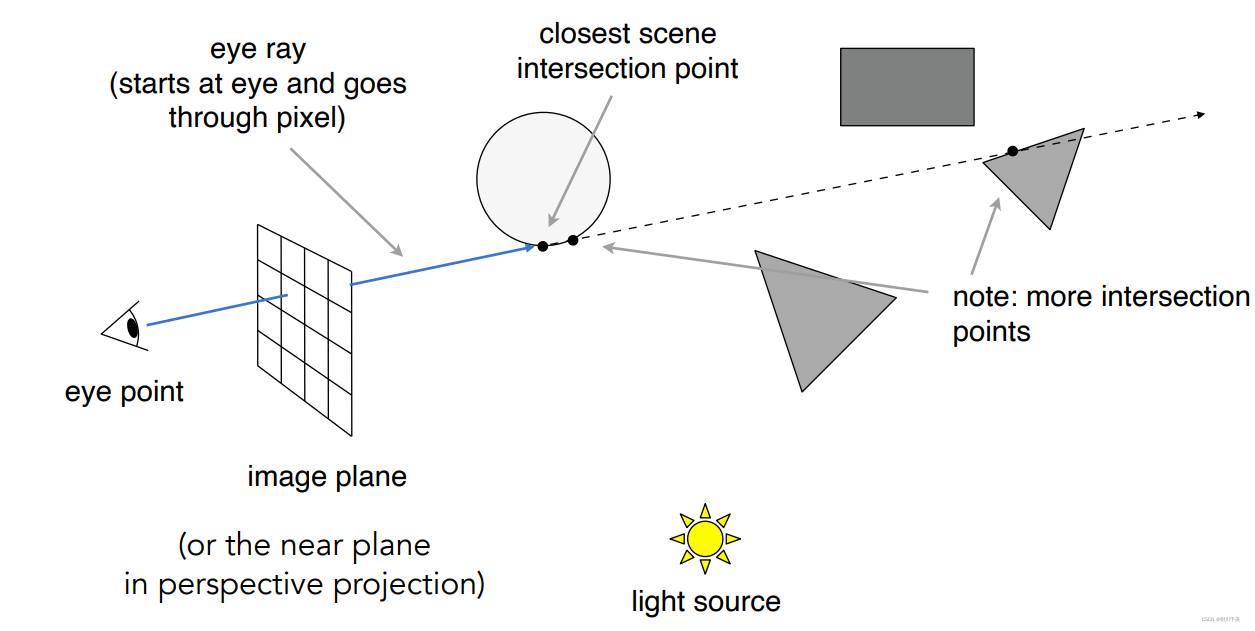
如果一条光线可以穿过多个物体,仍只需记录第一个被照射到的物体,后面的物体默认为被遮挡上了,处于阴影中,眼睛看不到,如上图虚线所示
Step2:将相交点与光源连接,判断是否处于阴影中,若不处于,则在image plane对应的网格位置记录该点的颜色信息等,不断重复操作直到用眼睛发出的光线遍历完image plane中的所有像素点
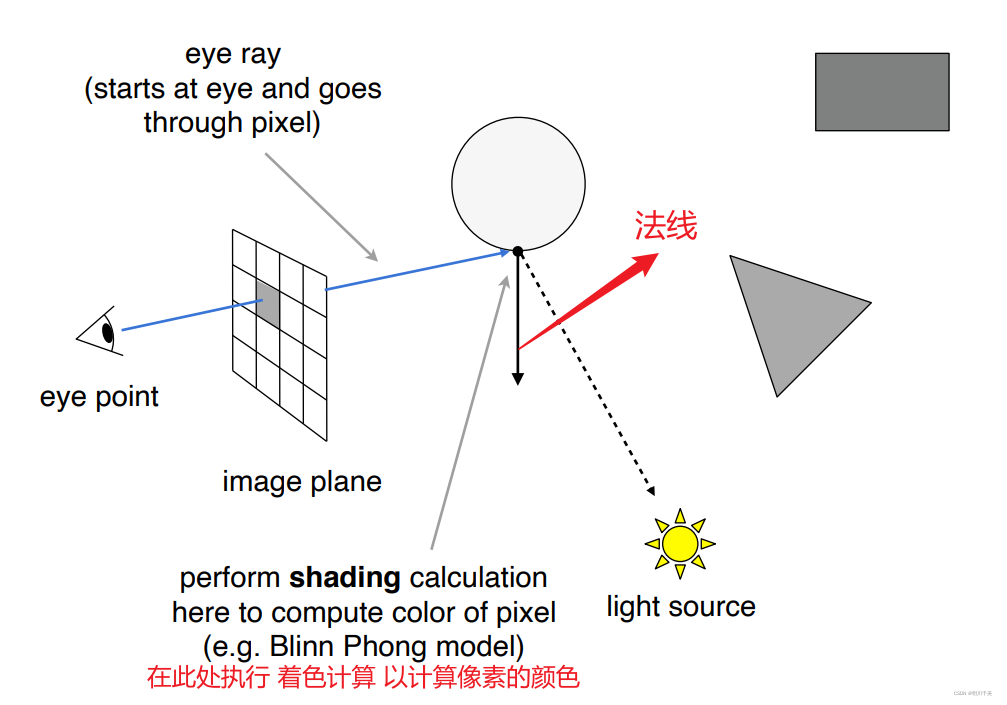
然而,这样做得到的结果与Blinn-Phong光照模型得到的结果一样,缺少现实物体的反射和折射功能,所以引入Whitted风格的光线追踪。
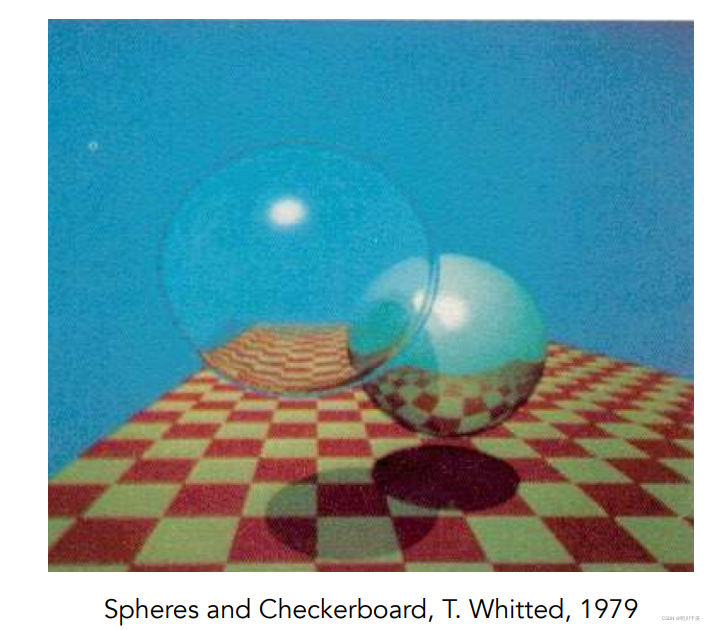
2.3Whitted风格的光线追踪(Whitted-Style Ray Tracing)
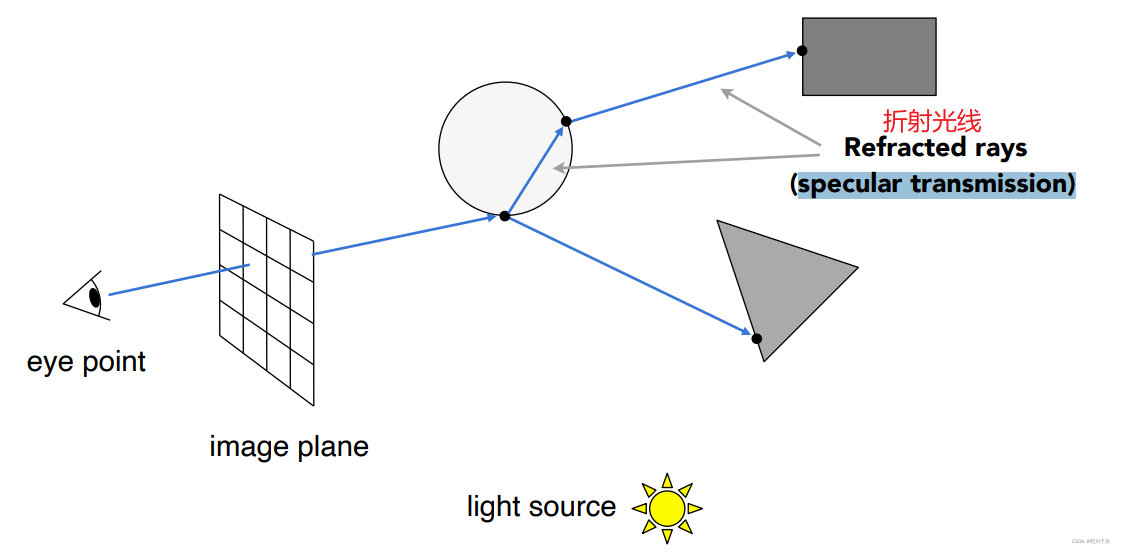
Whitted-Style Ray Tracing很不错的解决了折射和反射相关的投影到视觉图上的效果:
实现过程:
Step1:和上述的基础光线追踪的Step1步骤一样,只是有多添加了光线的反射和折射
注:当光线打到光滑的物体表面时,会同时发生折射和反射
Step2:将上述四个点分别与光源连接,然后在像素块中按一定的权重比例记录下颜色信息(如直射光线60%,折射反射光线占40%等)
2.4计算光线和物体表面的交点
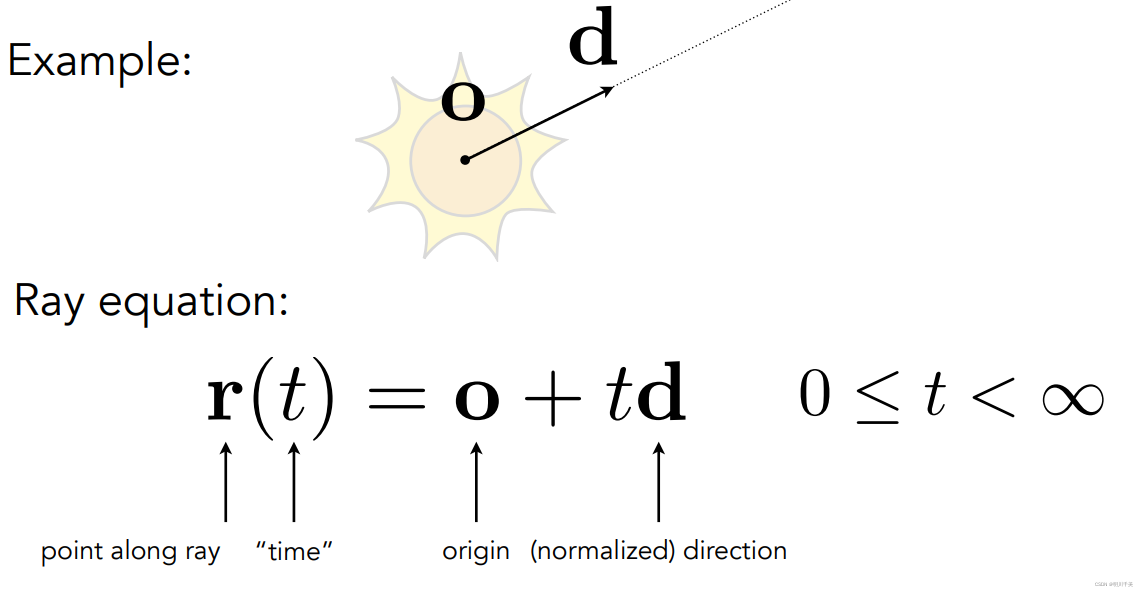
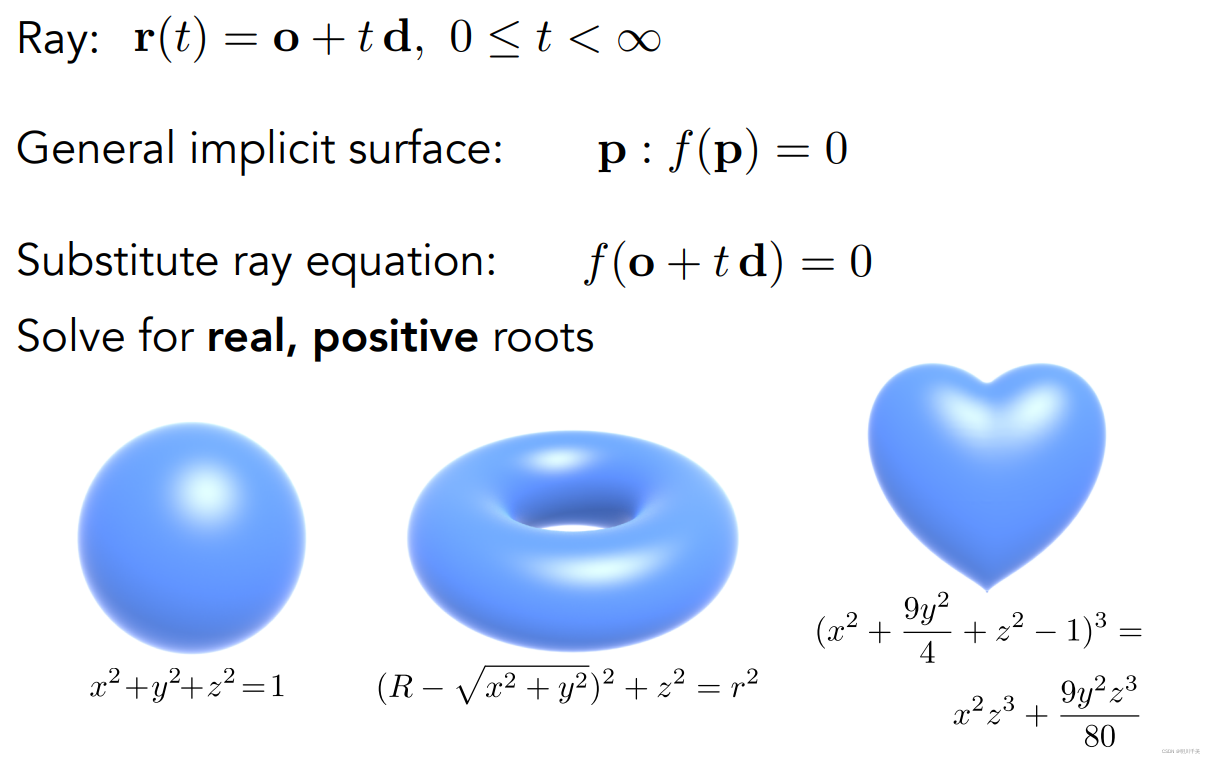
2.4.1光线的表示
光线就是一条射线,一个向量,由起点,方向和时间构成:
2.4.2光线和隐式曲面的交点
以光线和球的交点为例:
求光线和球的交点实质上就是求同时满足光线方程和球方程的点:
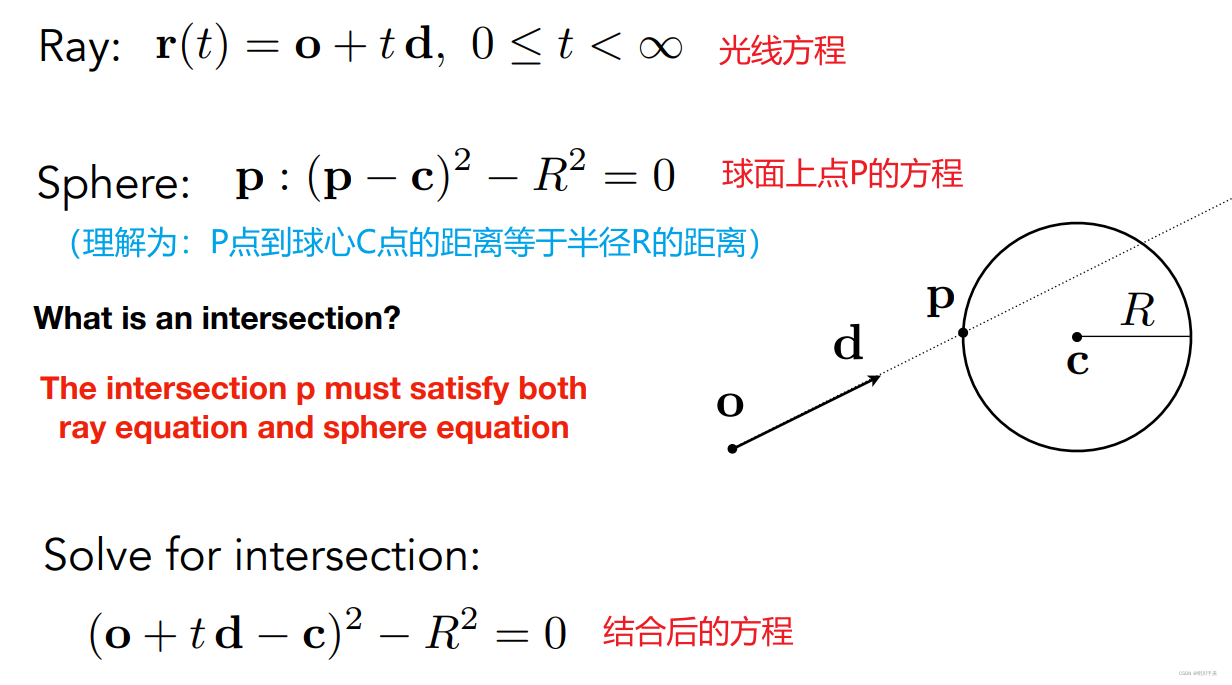
方程求解:
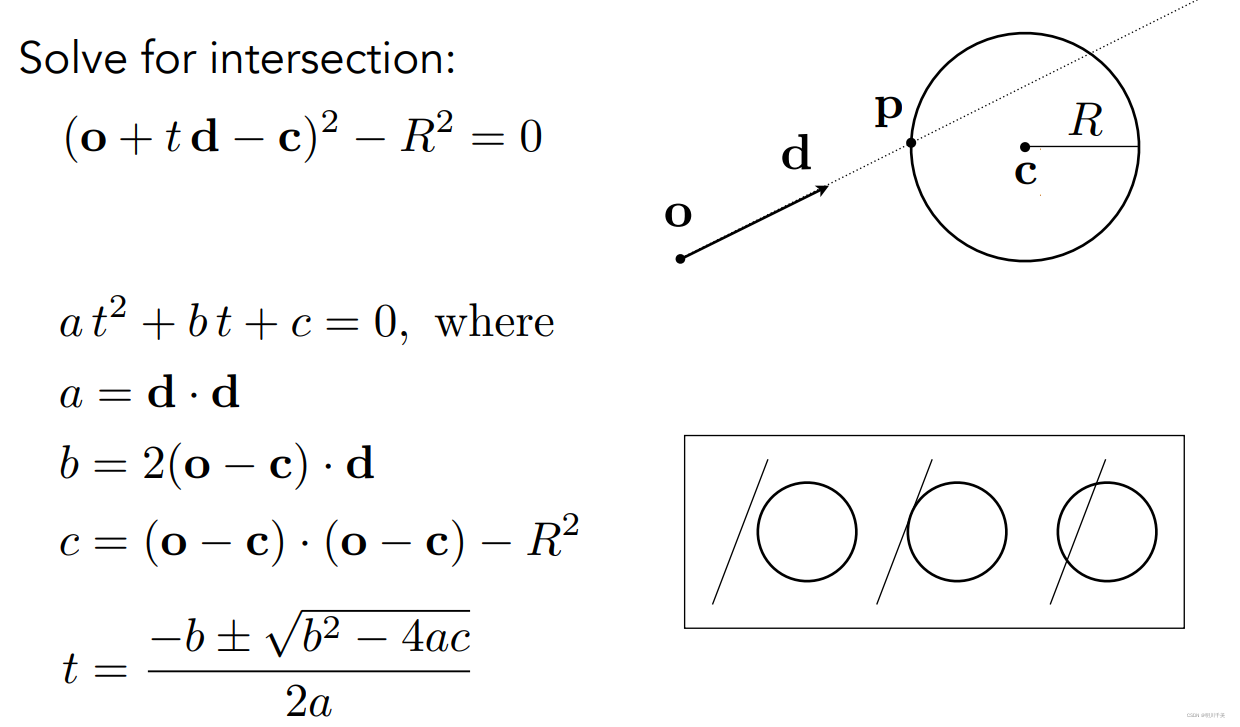
由方程解
t
t
t的数量来判断有几个相交点(0个,1个,2个),若为2个,则取离光线最近的交点。
由此可以推广应用到所有隐式曲面的交点:
表面交点P都可以由物体方程等于0来表示(
f
(
p
)
=
0
f(p)=0
f(p)=0),然后让光线方程和P点方程联立,解方程即可。
2.4.3计算光线和显式曲面的交点
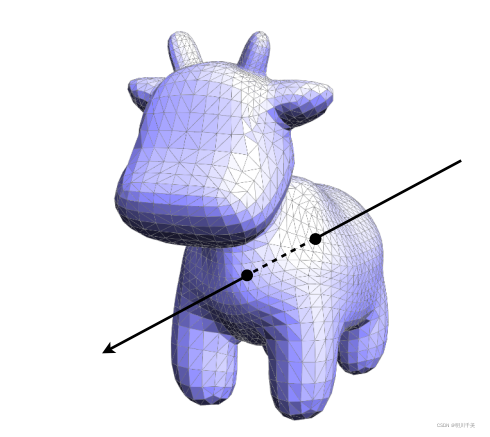
如上图所示,为光线与显式曲面的交点,可以看出,其交点其实就是与三角形面的交点,因此转化问题为计算光线与三角面的交点。
首先先做该三角形所在平面,平面由法向量和平面上的一点定义:
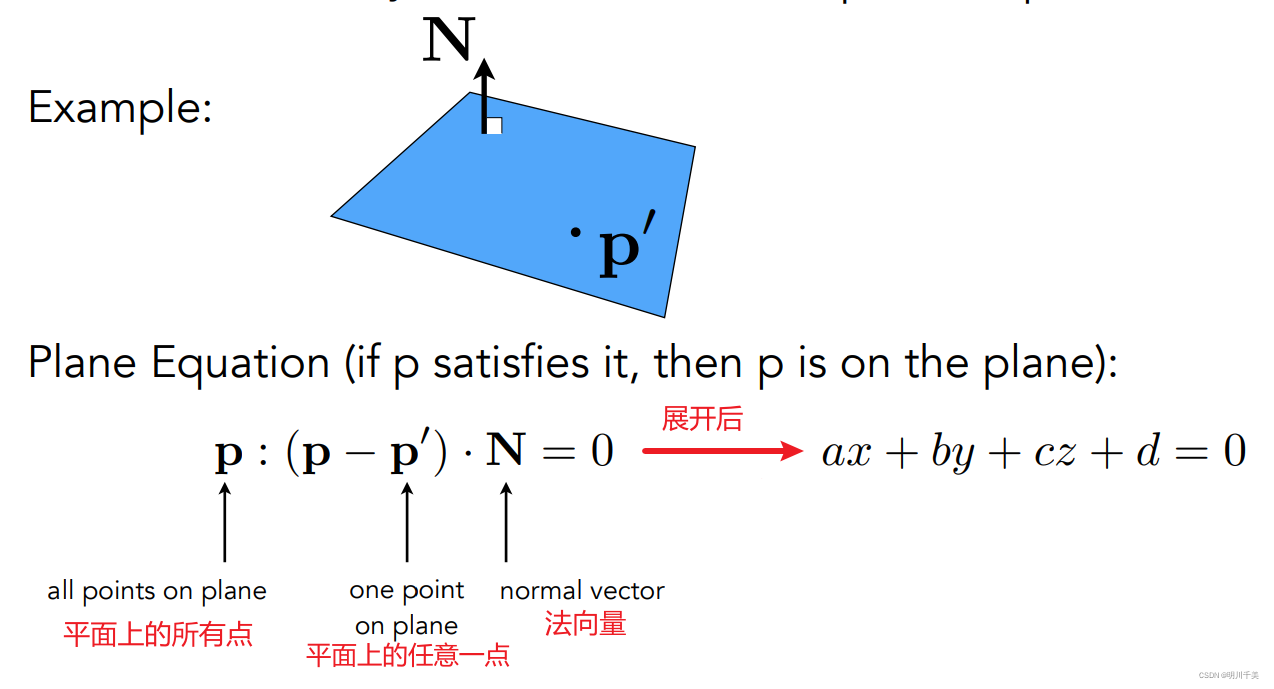
联立光线方程和点P方程,解方程;求得t之后,代入光线方程,就能得到交点了:
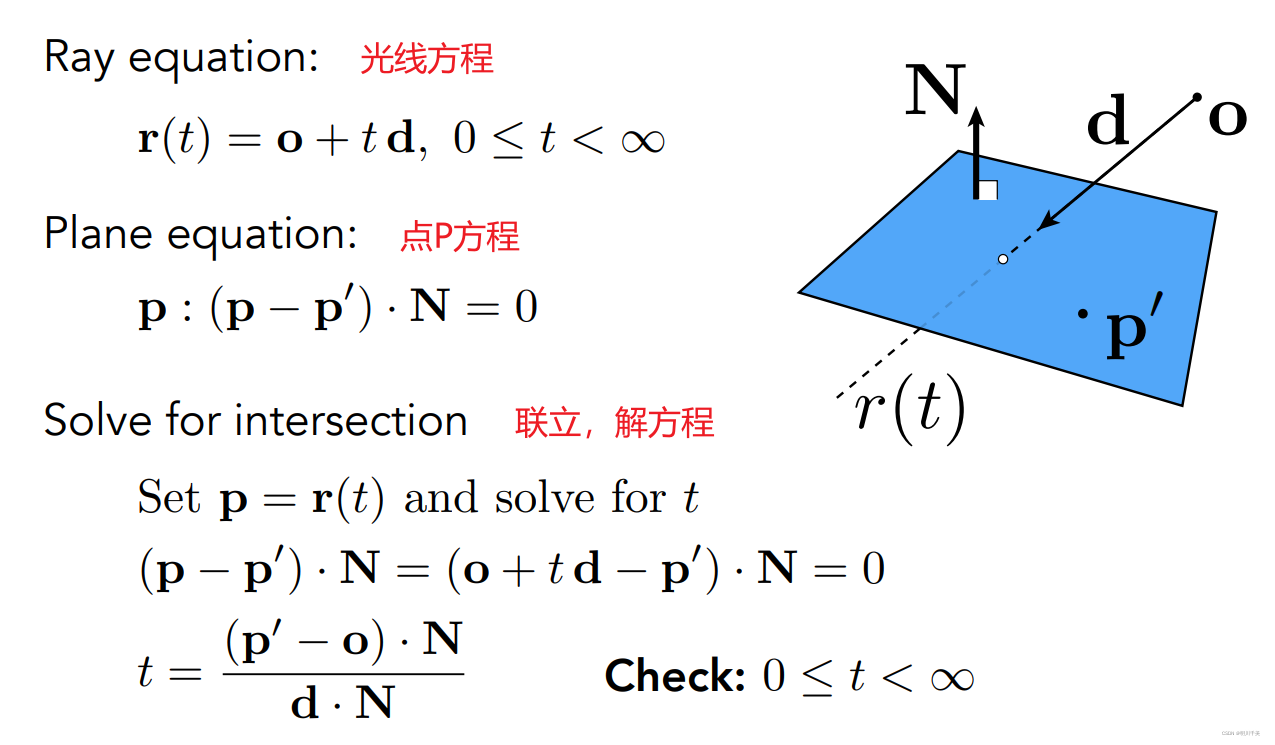
得到了交点之后,就能进一步判断该点是否在三角形内了。
由于判断点是否在三角形内较为麻烦,所以引出新的直接求交点方法
Möller Trumbore 算法:
求解交点位置之后,也顺带判断了该点是否在三角形内部
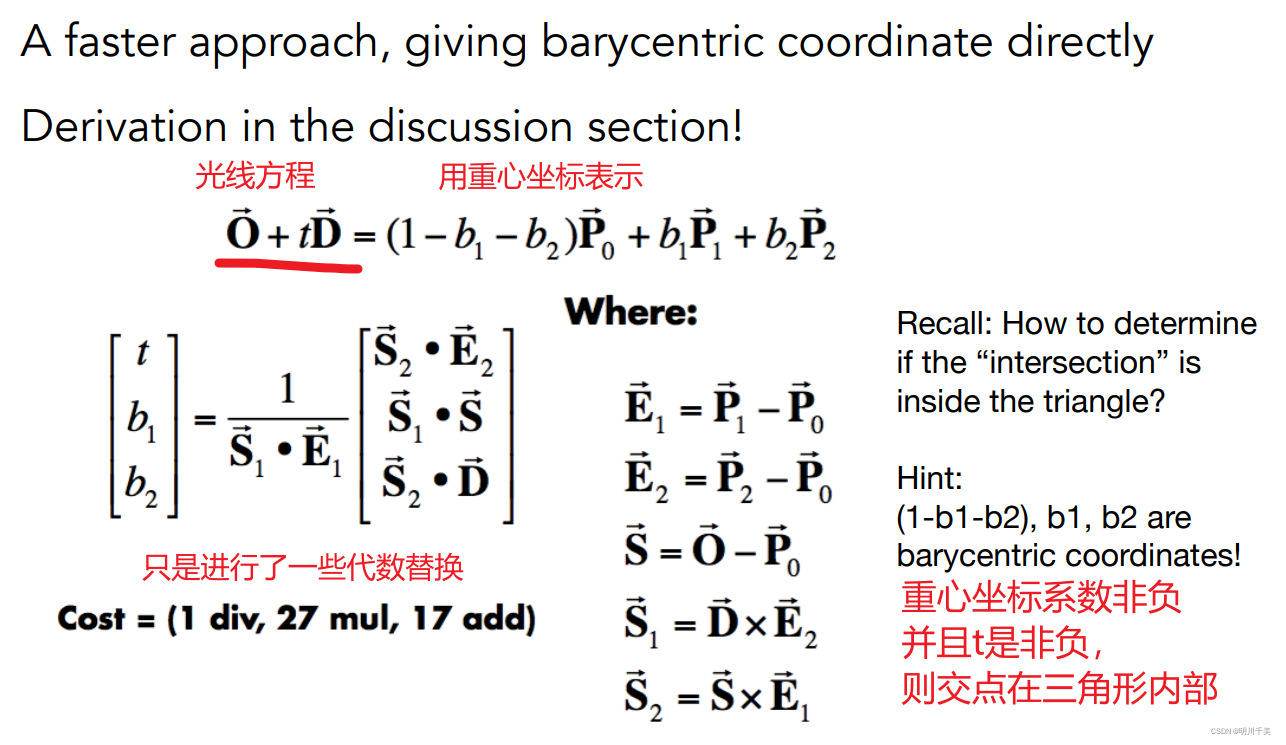 如上图所示,引用之前所学知识(如何判断平面内一点和三角形的关系),即
a
P
0
+
b
P
1
+
c
P
2
=
P
aP_0+bP_1+cP_2=P
aP0+bP1+cP2=P(其中a+b+c=1;
P
0
,
P
1
,
P
2
P_0,P_1,P_2
P0,P1,P2是三角形的三个顶点;如果该点P位于三角形内部,那么a,b,c均为非负数),因此可以得到图中上方公式。可以将where下的方程代入左侧方程中,解这三个方程即可计算出(t,b1,b2)。
如上图所示,引用之前所学知识(如何判断平面内一点和三角形的关系),即
a
P
0
+
b
P
1
+
c
P
2
=
P
aP_0+bP_1+cP_2=P
aP0+bP1+cP2=P(其中a+b+c=1;
P
0
,
P
1
,
P
2
P_0,P_1,P_2
P0,P1,P2是三角形的三个顶点;如果该点P位于三角形内部,那么a,b,c均为非负数),因此可以得到图中上方公式。可以将where下的方程代入左侧方程中,解这三个方程即可计算出(t,b1,b2)。
那是这上述所说的计算交点的方法都是非常耗时的,为了能够更快的提高计算交点的速度,我们引入包围盒(Bounding Volumes)概念。















 2136
2136











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









