







视图变换
1.模型变换(Model Transformtion)
是指变换被照物体的位置,角度。即上一节的内容。
目的:是将游戏场景中的物体调整至他们应该在的位置。
简单通俗来讲,就是将场景中的模型摆好,这个过程就叫模型变换。模型变换不同顺序有不同的结果,其实就是因为矩阵相乘不满足交换律,但满足结合律,所以对应同一个复合变换,可以先得出其中的基础变换的矩阵乘积,再与输入向量相乘。一般地,先进行线性变换,再进行非线性变换。
2.视图变换(View Transformation)
也可称为摄像机变换(Camera Tranformation),对于一个三维空间场景(二维亦如此),最终呈现在显示设备上的都是一个二维的平面视图,所以在放置好(模型变换)场景中的模型后,需要找一个合适的角度,让摄像机或者说人眼,看向场景中的被放置好的模型,这个找角度的过程,就叫视图变换。
目的:是得到所有可视物体与摄像机的相对位置。为投影变换做准备。
摄像机定义:视图变换需要对摄像机生成的视图有一个唯一的定义,摄像机定义包含三个要素:
① 位置(Position):用向量
e
⃗
\vec{e}
e 表示:显然,一个物体在空间中,肯定是需要一个坐标的;
② 朝向(Look-at):用向量
g
^
\hat{g}
g^ 表示:有了位置后,摄像机不同的拍摄角度会生成不同的视图,所以还要定义一个朝向;
③ 向上的方向(Up direction):用向量
t
^
\hat{t}
t^ 表示:即摄像机永远的头的正上方。固定好位置与朝向之后,摄像机还是可以360°旋转的,不同的旋转角也会生成不同的视图,所以还需要定义一个向上的方向来描述摄像机的旋转。

变换方法:
大致思路:将物体和摄像机一起移动,将摄像机的坐标轴移动到x,y,z轴,而物体坐标也作相应的移动。(假设摄像机坐标轴为u,v,w 分别对应原世界空间中的x,y,z)
Step1:将相机位置移动至原点(减去相机位置坐标
e
⃗
\vec{e}
e )
Step2:通过旋转矩阵将二者坐标系重合(用上一节基础变换的方法——旋转矩阵的逆=转置)

常规步骤:
1.将摄像机位置坐标
e
⃗
\vec{e}
e 移动到原点
2.将
g
^
\hat{g}
g^旋转到-Z
3.将
t
^
\hat{t}
t^旋转到Y
4.将
(
g
×
t
)
(g \times t)
(g×t)旋转到X
改进后:
1.将摄像机位置坐标
e
⃗
\vec{e}
e 移动到原点
2.由任意位置转换到标准位置改成由标准位置转化为任意位置
3.对求出的矩阵求逆矩阵
4.
M
v
i
e
w
=
R
v
i
e
w
T
v
i
e
w
M_{view}=R_{view}T_{view}
Mview=RviewTview (顺序不可调换)
第一步:平移矩阵

第二步:旋转矩阵

第三步:求矩阵的逆
旋转矩阵是正交矩阵,所以求矩阵的逆就相当于求该矩阵的转置。

第四步:代入公式计算
M
v
i
e
w
=
R
v
i
e
w
T
v
i
e
w
M_{view}=R_{view}T_{view}
Mview=RviewTview (顺序不可调换)
3.投影变换(Project Transformation)
简单来说就是:3D转2D

3.1正交投影(Orthographic projection)
概念表示: 正交投影的投影中心到投影面之间的距离是无限远的,当投影中心距离投影面无限远的时候,两个具有前后位置关系的模型看起来大小也是一致的。
数学表示: 正交投影就是摄像机在原点,看向-z方向,顶部在y方向,在看向物体时将所有物体的z值归0,然后将物体平移并缩放到
[
−
1
,
1
]
2
[-1,1]^2
[−1,1]2之间。
正交投影的做法就是把物体移到原点处的
[
−
1
,
1
]
3
[-1,1]^3
[−1,1]3的标准立方体中。
在变换前,先定义所有模型所在空间的描述:f,n—远/近裁剪平面(Z轴坐标范围)、t,b—上下平面(Y轴坐标范围)、l,r—左右平面(X轴坐标范围)。

变换步骤:
1.将模型中心点平移到原点
2.进行缩放,将模型缩放到
[
−
1
,
1
]
3
[-1,1]^3
[−1,1]3的标准立方体中
3.缩放矩阵
×
\times
×平移矩阵
第一步:平移


注:平移矩阵中的这三个平移量得出的原因是因为要将中心平移到原点,所以要取每个轴的中心坐标,平移量为负的原因是将任意一个点平移到原点都是负的平移量。
第二步:缩放


注:缩放矩阵中的这三个缩放量得出的原因是用的
[
−
1
,
1
]
[-1,1]
[−1,1]的标准长度除以物体的每个轴所对应的长度,得到的缩放量。
第三步:相乘

3.2透视投影(Perspective projection)
概念表示: 透视投影的投影中心到投影面之间的距离是有限的,产生了“近大远小”的效果,更符合人眼的成像。欧式几何中规定平行线永不相交,而在透视投影中,平行线会在视觉的“远”处相交。

变换步骤:
1.先将透视投影的几何体“挤”成正交投影的长方体
2.运用解决正交投影变换的方法来解决
第一步:挤

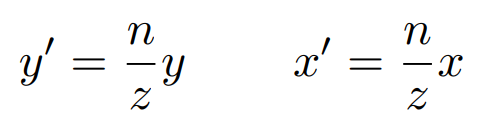
从截面观察各点的变化情况:(结合三角形相似性质)

由此可得出:
最终远平面“挤压”结果在齐次坐标中:

注:乘以z值之后得到的结果仍相同的原因:因为在齐次坐标中,各个维度乘以相同的值得到点和原来一样。
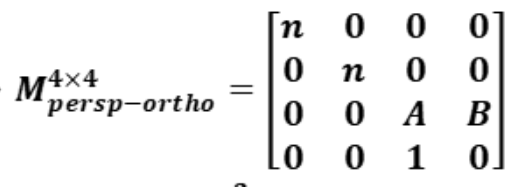
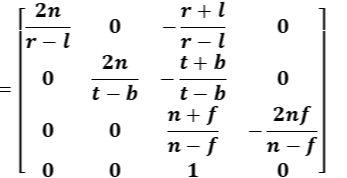
综上所述,可得透视投影“挤压”成正交矩阵的结果为:

由于已经知道了三行的值,所以可以逆推出透视变正交矩阵的三行的值:

推第三行的值:
运用透视投影的性质:
- 近平面上的点坐标不变
- 远平面上的点Z轴坐标不变
注:注意近平面和远平面之间的点Z轴坐标还是会变的
在近平面上:
因为近平面投影后还是自身,即坐标不变,所以如果在近平面上一点 (x, y, n, 1),与上图的矩阵相乘后,必然会得到 (nx, ny, n², n),故由 n² 可看出上图中矩阵的第三行 Z 轴的变换与 X,Y 轴无关:

算第三行的大概值:

由上图可得:
在远平面上:
由这两个性质可得,在远平面上的一点 (x, y, f, 1) ,与上图得到的含A、B的矩阵相乘后,必得 (nx, ny, f², f),可以得出关于变量 A,B 的关系式,由此可解得四棱台“挤压”到长方体的矩阵:
将远平面上的一点 (x, y, f, 1) 代入:
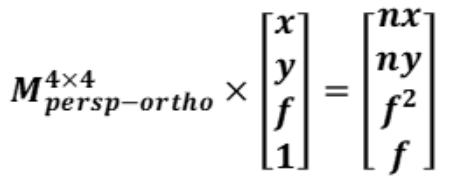
由上图可得:

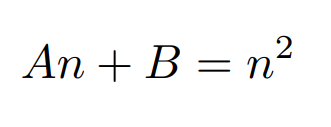
由:
A
n
+
B
=
n
2
An+B=n^2
An+B=n2
A
f
+
B
=
f
2
Af+B=f^2
Af+B=f2
解得:
A
=
n
+
f
A=n+f
A=n+f
B
=
−
n
f
B=-nf
B=−nf
代入得:

第二步:进行正交投影变换(先平移再缩放)
M
p
e
r
s
p
=
M
o
r
t
h
o
M
p
e
r
s
p
→
o
r
t
h
o
M_{persp}=M_{ortho}M_{persp→ortho}
Mpersp=MorthoMpersp→ortho

4.视口变换(ViewPort Transformation)
概念表示: 在我们做完投影变换后所有物体都映射在标准坐标系中,但是屏幕会有各种各样的分辨率,所以视口变换是为了将正常设备坐标映射到屏幕坐标。
假设屏幕的宽为width,高度为height,那么视口变换就是把
[
−
1
,
1
]
2
[-1,1]^2
[−1,1]2的xy平面变到
[
0
,
w
i
d
t
h
]
×
[
0
,
h
e
i
g
h
t
]
[0,width]\times[0,height]
[0,width]×[0,height]。
注:不考虑Z轴的原因,因为z轴在之后的其他地方有用。
















 2926
2926











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









