






1电源引脚(VDD,GND)
AHT20的供电范围为2.0-5.5V,推荐电压为3.3V,在VDD和GND之间必须加上去耦电容1uF, 起到滤波作用。VDD比SDA和SCL优先上电或者同步上电,避免因为信号线(SCL/SDA)漏电电流灌入,导致芯片上电后处于非工作状态。
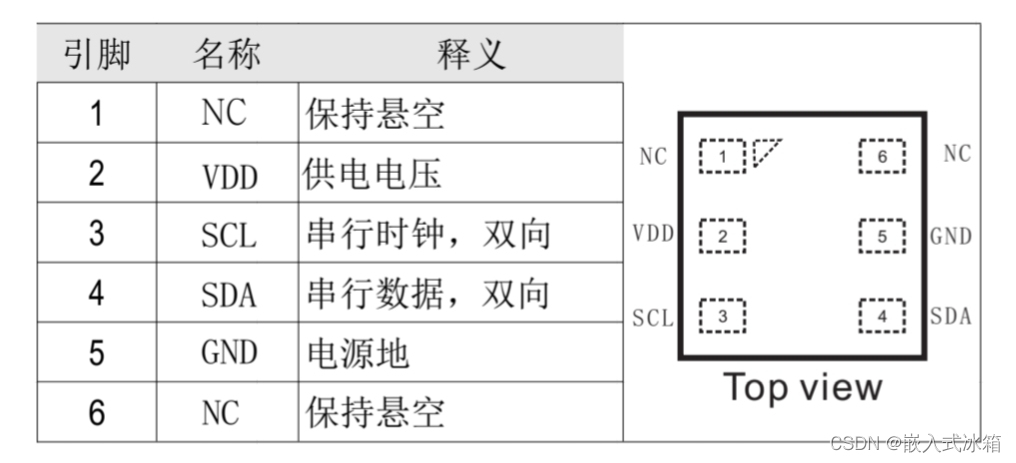
2串行时钟
CSLSCL 用于微处理器与AHT20之间的通讯同步。由于接口包含了完全静态逻辑,因而不存在最小SCL频率。
3串行数据
SDASDA 引脚用于传感器的数据输入和输出。当向传感器发送命令时,SDA在串行时钟SCL的上升沿有效,且当SCL为高电平时,SDA必须保持稳定。在SCL下降沿之后,SDA值可被改变。为确保通信安全,SDA的有效时间在SCL上升沿之前,和下降沿之后应该分别延长至TSUand THO-参考图17。当从传感器读取数据时,SDA在SCL变低以后有效 (TV),且维持到下一个SCL的下降沿。
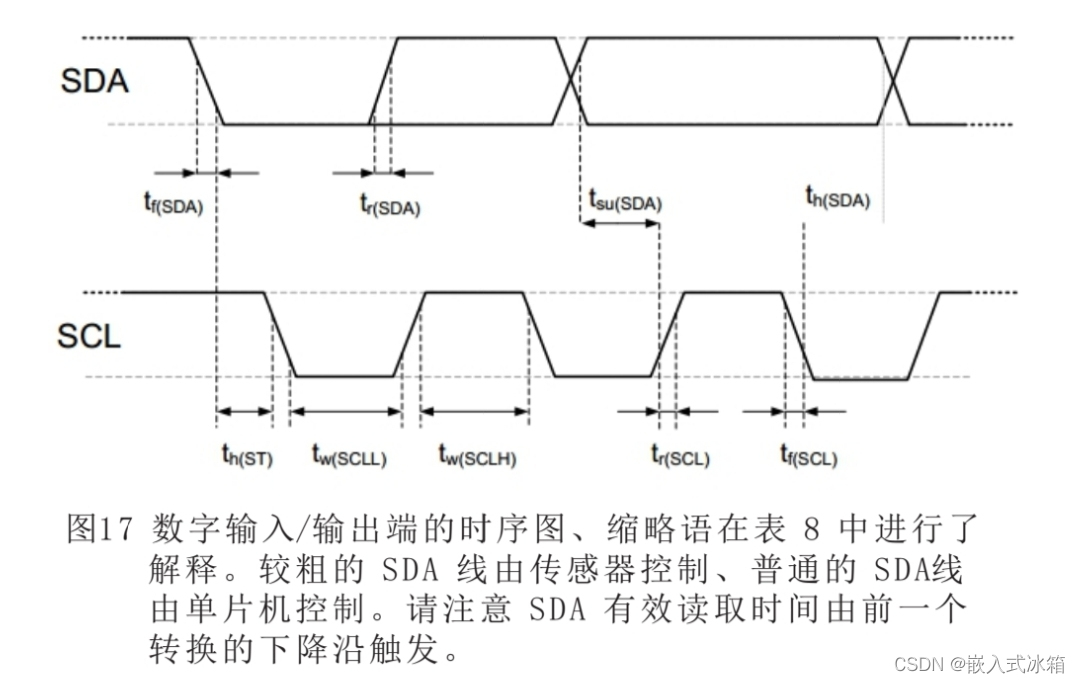
为避免信号冲突,微处理器(MCU)必须只能驱动 SDA 和 SCL 在低电平,需要一个外部的上拉电阻 (例如:2.0~10kΩ)将信号提拉至高电平,上拉电阻通常可能已包含在微处理器的 I/O 电路中。
4启动传感器
启动传感器第一步,将传感器上电,电压为所选择的 VDD电源电压(范围介于2.0V与5.5V之间)。上电后传感器最多需要20ms时间(此时SCL为高电平)以达到空闲状态即做好准备接收由主机 (MCU)发送的命令。
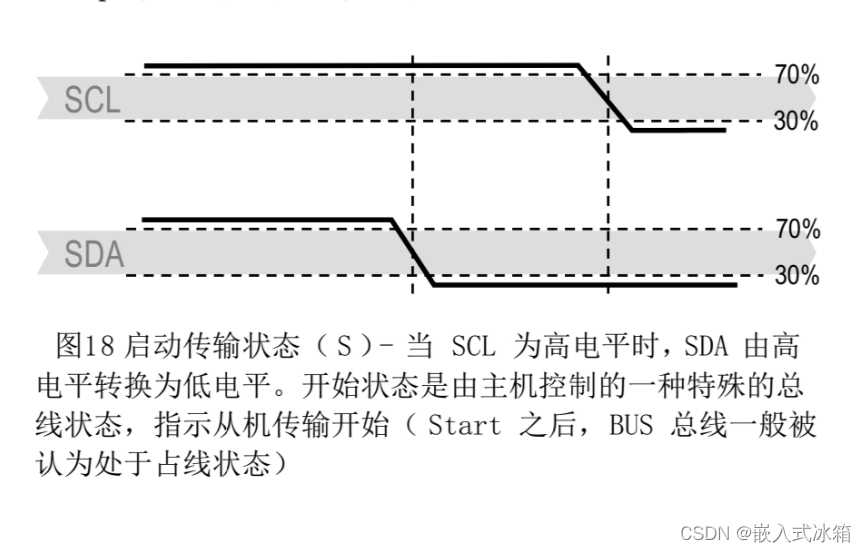
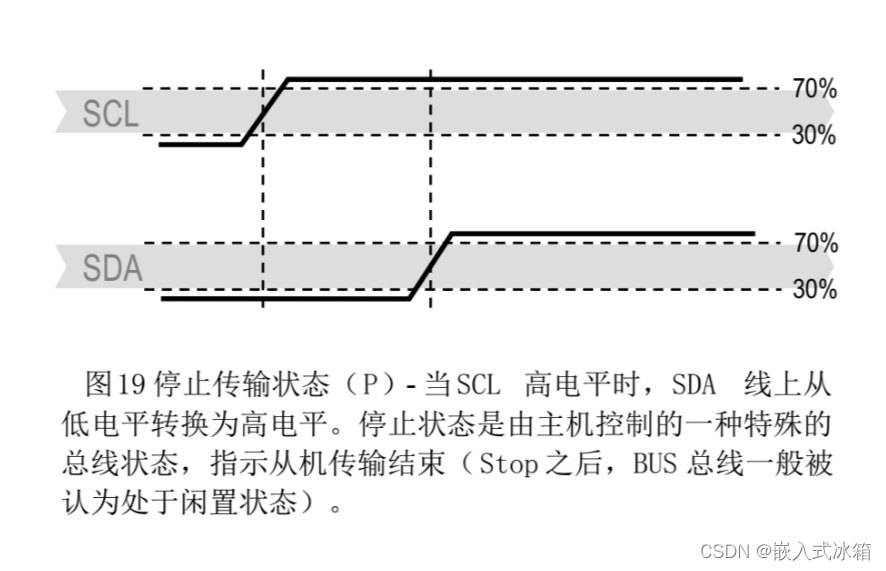
5启动/停止时序
每个传输序列都以Start状态作为开始并以Stop状态作为结束,如图18和图19。
6发送命令
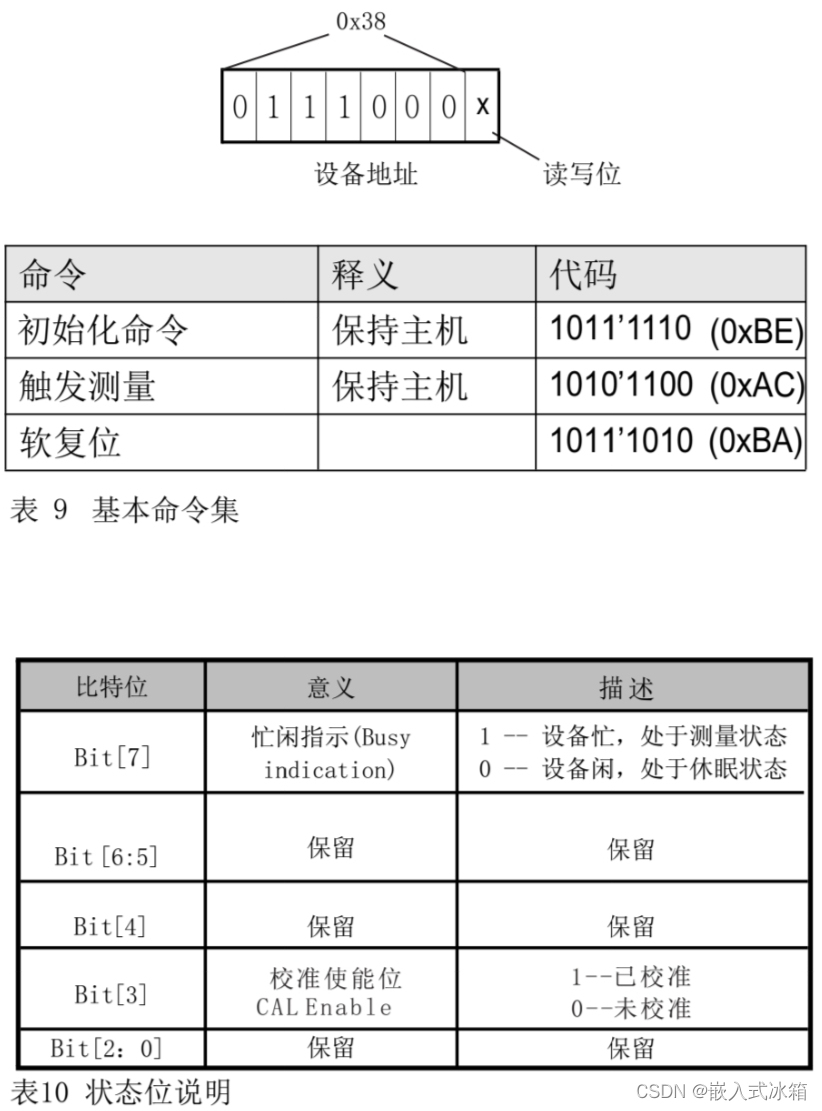
在启动传输后,随后传输的I2C首字节包括7位2的IC设备地址0x38和一个SDA方向位 x(读R:‘1',写W:‘0’)。在第8个SCL时钟下降沿之后,通过拉低 SDA引脚 (ACK位),指示传感器数据接收正常。在发送测量命令0xAC之后,MCU必须等到测量完成,基本的命令在表9中进行概述。表10为从机返回的状态位说明。
7传感器读取流程
1.上电后要等待40ms,读取温湿度值之前,首先要看状态字的校准使能位Bit[3]是否为1(通过发送0x71可以获取一个字节的状态字),如果不为1,要发送0xBE命令(初始化),此命令参数有两个字节,第一个字节为0x08,第二个字节为0x00,然后等待10ms。2.直接发送 0xAC命令(触发测量),此命令参数有两个字节,第一个字节为 0x33,第二个字节为0x00。3.等待80ms待测量完成,如果读取状态字Bit[7]为0,表示测量完成,然后可以连续读取六个字节;否则继续等待。4.当接收完六个字节后,紧接着下一个字节是CRC校验数据,用户可以根据需要读出,如果接收端需要CRC校验,则在接收完第六个字节后发ACK应答,否则发NACK结束,CRC初始值为0XFF

计算温湿度值。注:在第一步的校准状态检验只需要上电时检查,在正常采集过程无需操作。
8软复位
开电源的情况下,重新启动传感器系统。在接收到这个命令之后,传感器系统开始重新初始化,并恢复默认设置状态,软复位所需时间不超过20毫秒。
9信号转换
相对湿度转换相对湿度RH 都可以根据SDA 输出的相对湿度信号 SRH 通过如下公式计算获得(结果以%RH表示)

温度转换温度T 都可以通过将温度输出信号 ST 代入到下面的公式计算得到(结果以温度 ℃ 表示)

//AHT20.c
#include "bsp_i2c.h"
#include "delay.h"uint8_t ack_status=0;
uint8_t readByte[6];
uint8_t AHT20_status=0;uint32_t H1=0; //Humility
uint32_t T1=0; //Temperatureuint8_t AHT20_OutData[4];
uint8_t AHT20sendOutData[10] = {0xFA, 0x06, 0x0A, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF};void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ; //ÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
IIC_SCL=1;
IIC_SDA=1;
}
//²úÉúIICÆðʼÐźÅ
void IIC_Start(void)
{
SDA_OUT(); //sdaÏßÊä³ö
IIC_SDA=1;
IIC_SCL=1;
delay_us(4);
IIC_SDA=0;//START:when CLK is high,DATA change form high to low
delay_us(4);
IIC_SCL=0;//ǯסI2C×ÜÏߣ¬×¼±¸·¢ËÍ»ò½ÓÊÕÊý¾Ý
}
//²úÉúIICÍ£Ö¹ÐźÅ
void IIC_Stop(void)
{
SDA_OUT();//sdaÏßÊä³ö
IIC_SCL=0;
IIC_SDA=0;//STOP:when CLK is high DATA change form low to high
delay_us(4);
IIC_SCL=1;
IIC_SDA=1;//·¢ËÍI2C×ÜÏß½áÊøÐźÅ
delay_us(4);
}
//µÈ´ýÓ¦´ðÐźŵ½À´
//·µ»ØÖµ£º1£¬½ÓÊÕÓ¦´ðʧ°Ü
// 0£¬½ÓÊÕÓ¦´ð³É¹¦
u8 IIC_Wait_Ack(void)
{
u8 ucErrTime=0;
SDA_IN(); //SDAÉèÖÃΪÊäÈë
IIC_SDA=1;delay_us(1);
IIC_SCL=1;delay_us(1);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
IIC_SCL=0;//ʱÖÓÊä³ö0
return 0;
}
//²úÉúACKÓ¦´ð
void IIC_Ack(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=0;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//²»²úÉúACKÓ¦´ð
void IIC_NAck(void)
{
IIC_SCL=0;
SDA_OUT();
IIC_SDA=1;
delay_us(2);
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
}
//IIC·¢ËÍÒ»¸ö×Ö½Ú
//·µ»Ø´Ó»úÓÐÎÞÓ¦´ð
//1£¬ÓÐÓ¦´ð
//0£¬ÎÞÓ¦´ð
void IIC_Send_Byte(u8 txd)
{
u8 t;
SDA_OUT();
IIC_SCL=0;//ÀµÍʱÖÓ¿ªÊ¼Êý¾Ý´«Êä
for(t=0;t<8;t++)
{
IIC_SDA=(txd&0x80)>>7;
txd<<=1;
delay_us(2); //¶ÔTEA5767ÕâÈý¸öÑÓʱ¶¼ÊDZØÐëµÄ
IIC_SCL=1;
delay_us(2);
IIC_SCL=0;
delay_us(2);
}
}
//¶Á1¸ö×Ö½Ú£¬ack=1ʱ£¬·¢ËÍACK£¬ack=0£¬·¢ËÍnACK
u8 IIC_Read_Byte(unsigned char ack)
{
unsigned char i,receive=0;
SDA_IN();//SDAÉèÖÃΪÊäÈë
for(i=0;i<8;i++ )
{
IIC_SCL=0;
delay_us(2);
IIC_SCL=1;
receive<<=1;
if(READ_SDA)receive++;
delay_us(1);
}
if (!ack)
IIC_NAck();//·¢ËÍnACK
else
IIC_Ack(); //·¢ËÍACK
return receive;
}
void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr)
{
IIC_Start();
if(device_addr==0xA0) //eepromµØÖ·´óÓÚ1×Ö½Ú
IIC_Send_Byte(0xA0 + ((addr/256)<<1));//·¢Ë͸ߵØÖ·
else
IIC_Send_Byte(device_addr); //·¢Æ÷¼þµØÖ·
IIC_Wait_Ack();
IIC_Send_Byte(addr&0xFF); //·¢Ë͵͵ØÖ·
IIC_Wait_Ack();
IIC_Send_Byte(data); //·¢ËÍ×Ö½Ú
IIC_Wait_Ack();
IIC_Stop();//²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ
if(device_addr==0xA0) //
delay_ms(10);
else
delay_us(2);
}
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead) //¶Á¼Ä´æÆ÷»ò¶ÁÊý¾Ý
{
uint16_t data;
IIC_Start();
if(device_addr==0xA0)
IIC_Send_Byte(0xA0 + ((addr/256)<<1));
else
IIC_Send_Byte(device_addr);
IIC_Wait_Ack();
IIC_Send_Byte(addr&0xFF); //·¢Ë͵͵ØÖ·
IIC_Wait_Ack();
IIC_Start();
IIC_Send_Byte(device_addr+1); //·¢Æ÷¼þµØÖ·
IIC_Wait_Ack();
if(ByteNumToRead == 1)//LM75ζÈÊý¾ÝΪ11bit
{
data=IIC_Read_Byte(0);
}
else
{
data=IIC_Read_Byte(1);
data=(data<<8)+IIC_Read_Byte(0);
}
IIC_Stop();//²úÉúÒ»¸öÍ£Ö¹Ìõ¼þ
return data;
}
/**********
*ÉÏÃ沿·ÖΪIO¿ÚÄ£¿éI2CÅäÖÃ
*
*´ÓÕâÒÔÏ¿ªÊ¼ÎªAHT20µÄÅäÖÃI2C
*º¯ÊýÃûÓÐIICºÍI2CµÄÇø±ð£¬Çë×¢Ò⣡£¡£¡£¡£¡
*
*2020/2/23×îºóÐÞ¸ÄÈÕÆÚ
*
***********/
void read_AHT20_once(void)
{
delay_ms(10);reset_AHT20();
delay_ms(10);init_AHT20();
delay_ms(10);startMeasure_AHT20();
delay_ms(80);read_AHT20();
delay_ms(5);
}
void reset_AHT20(void)
{I2C_Start();
I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("1");
else printf("1-n-");
I2C_WriteByte(0xBA);
ack_status = Receive_ACK();
if(ack_status) printf("2");
else printf("2-n-");
I2C_Stop();/*
AHT20_OutData[0] = 0;
AHT20_OutData[1] = 0;
AHT20_OutData[2] = 0;
AHT20_OutData[3] = 0;
*/
}void init_AHT20(void)
{
I2C_Start();I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("3");
else printf("3-n-");
I2C_WriteByte(0xE1);
ack_status = Receive_ACK();
if(ack_status) printf("4");
else printf("4-n-");
I2C_WriteByte(0x08);
ack_status = Receive_ACK();
if(ack_status) printf("5");
else printf("5-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("6");
else printf("6-n-");
I2C_Stop();
}void startMeasure_AHT20(void)
{
//------------
I2C_Start();I2C_WriteByte(0x70);
ack_status = Receive_ACK();
if(ack_status) printf("7");
else printf("7-n-");
I2C_WriteByte(0xAC);
ack_status = Receive_ACK();
if(ack_status) printf("8");
else printf("8-n-");
I2C_WriteByte(0x33);
ack_status = Receive_ACK();
if(ack_status) printf("9");
else printf("9-n-");
I2C_WriteByte(0x00);
ack_status = Receive_ACK();
if(ack_status) printf("10");
else printf("10-n-");
I2C_Stop();
}void read_AHT20(void)
{
uint8_t i;for(i=0; i<6; i++)
{
readByte[i]=0;
}//-------------
I2C_Start();I2C_WriteByte(0x71);
ack_status = Receive_ACK();
readByte[0]= I2C_ReadByte();
Send_ACK();readByte[1]= I2C_ReadByte();
Send_ACK();readByte[2]= I2C_ReadByte();
Send_ACK();readByte[3]= I2C_ReadByte();
Send_ACK();readByte[4]= I2C_ReadByte();
Send_ACK();readByte[5]= I2C_ReadByte();
SendNot_Ack();
//Send_ACK();I2C_Stop();
//--------------
if( (readByte[0] & 0x68) == 0x08 )
{
H1 = readByte[1];
H1 = (H1<<8) | readByte[2];
H1 = (H1<<8) | readByte[3];
H1 = H1>>4;H1 = (H1*1000)/1024/1024;
T1 = readByte[3];
T1 = T1 & 0x0000000F;
T1 = (T1<<8) | readByte[4];
T1 = (T1<<8) | readByte[5];T1 = (T1*2000)/1024/1024 - 500;
AHT20_OutData[0] = (H1>>8) & 0x000000FF;
AHT20_OutData[1] = H1 & 0x000000FF;AHT20_OutData[2] = (T1>>8) & 0x000000FF;
AHT20_OutData[3] = T1 & 0x000000FF;
}
else
{
AHT20_OutData[0] = 0xFF;
AHT20_OutData[1] = 0xFF;AHT20_OutData[2] = 0xFF;
AHT20_OutData[3] = 0xFF;
printf("ʧ°ÜÁË");}
printf("\r\n");
printf("ζÈ:%d%d.%d",T1/100,(T1/10)%10,T1%10);
printf("ʪ¶È:%d%d.%d",H1/100,(H1/10)%10,H1%10);
printf("\r\n");
}
uint8_t Receive_ACK(void)
{
uint8_t result=0;
uint8_t cnt=0;IIC_SCL = 0;
SDA_IN();
delay_us(4);IIC_SCL = 1;
delay_us(4);while(READ_SDA && (cnt<100))
{
cnt++;
}IIC_SCL = 0;
delay_us(4);if(cnt<100)
{
result=1;
}
return result;
}void Send_ACK(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);IIC_SDA = 0;
delay_us(4);IIC_SCL = 1;
delay_us(4);
IIC_SCL = 0;
delay_us(4);SDA_IN();
}void SendNot_Ack(void)
{
SDA_OUT();
IIC_SCL = 0;
delay_us(4);IIC_SDA = 1;
delay_us(4);IIC_SCL = 1;
delay_us(4);IIC_SCL = 0;
delay_us(4);IIC_SDA = 0;
delay_us(4);
}
void I2C_WriteByte(uint8_t input)
{
uint8_t i;
SDA_OUT();
for(i=0; i<8; i++)
{
IIC_SCL = 0;
delay_ms(5);if(input & 0x80)
{
IIC_SDA = 1;
//delaymm(10);
}
else
{
IIC_SDA = 0;
//delaymm(10);
}IIC_SCL = 1;
delay_ms(5);input = (input<<1);
}IIC_SCL = 0;
delay_us(4);SDA_IN();
delay_us(4);
}
uint8_t I2C_ReadByte(void)
{
uint8_t resultByte=0;
uint8_t i=0, a=0;IIC_SCL = 0;
SDA_IN();
delay_ms(4);for(i=0; i<8; i++)
{
IIC_SCL = 1;
delay_ms(3);a=0;
if(READ_SDA)
{
a=1;
}
else
{
a=0;
}//resultByte = resultByte | a;
resultByte = (resultByte << 1) | a;IIC_SCL = 0;
delay_ms(3);
}SDA_IN();
delay_ms(10);return resultByte;
}
void set_AHT20sendOutData(void)
{
/* --------------------------
* 0xFA 0x06 0x0A temperature(2 Bytes) humility(2Bytes) short Address(2 Bytes)
* And Check (1 byte)
* -------------------------*/
AHT20sendOutData[3] = AHT20_OutData[0];
AHT20sendOutData[4] = AHT20_OutData[1];
AHT20sendOutData[5] = AHT20_OutData[2];
AHT20sendOutData[6] = AHT20_OutData[3];// AHT20sendOutData[7] = (drf1609.shortAddress >> 8) & 0x00FF;
// AHT20sendOutData[8] = drf1609.shortAddress & 0x00FF;// AHT20sendOutData[9] = getXY(AHT20sendOutData,10);
}
void I2C_Start(void)
{
SDA_OUT();
IIC_SCL = 1;
delay_ms(4);IIC_SDA = 1;
delay_ms(4);
IIC_SDA = 0;
delay_ms(4);IIC_SCL = 0;
delay_ms(4);
}void I2C_Stop(void)
{
SDA_OUT();
IIC_SDA = 0;
delay_ms(4);IIC_SCL = 1;
delay_ms(4);IIC_SDA = 1;
delay_ms(4);
}
//AHT20.h
#ifndef __BSP_I2C_H
#define __BSP_I2C_H
#include "sys.h"
#include "delay.h"
#include "usart.h"
//ʹÓÃIIC1 ¹ÒÔØM24C02,OLED,LM75AD,HT1382 PB6,PB7
#define SDA_IN() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)8<<28;}
#define SDA_OUT() {GPIOB->CRL&=0X0FFFFFFF;GPIOB->CRL|=(u32)3<<28;}
//IO²Ù×÷º¯Êý
#define IIC_SCL PBout(6) //SCL
#define IIC_SDA PBout(7) //SDA
#define READ_SDA PBin(7) //ÊäÈëSDA
//IICËùÓвÙ×÷º¯Êý
void IIC_Init(void); //³õʼ»¯IICµÄIO¿Ú
void IIC_Start(void); //·¢ËÍIIC¿ªÊ¼ÐźÅ
void IIC_Stop(void); //·¢ËÍIICÍ£Ö¹ÐźÅ
void IIC_Send_Byte(u8 txd); //IIC·¢ËÍÒ»¸ö×Ö½Ú
u8 IIC_Read_Byte(unsigned char ack);//IIC¶ÁÈ¡Ò»¸ö×Ö½Ú
u8 IIC_Wait_Ack(void); //IICµÈ´ýACKÐźÅ
void IIC_Ack(void); //IIC·¢ËÍACKÐźÅ
void IIC_NAck(void); //IIC²»·¢ËÍACKÐźÅ
void IIC_WriteByte(uint16_t addr,uint8_t data,uint8_t device_addr);
uint16_t IIC_ReadByte(uint16_t addr,uint8_t device_addr,uint8_t ByteNumToRead);//¼Ä´æÆ÷µØÖ·£¬Æ÷¼þµØÖ·£¬Òª¶ÁµÄ×Ö½ÚÊý
void read_AHT20_once(void);
void reset_AHT20(void);
void init_AHT20(void);
void startMeasure_AHT20(void);
void read_AHT20(void);
uint8_t Receive_ACK(void);
void Send_ACK(void);
void SendNot_Ack(void);
void I2C_WriteByte(uint8_t input);
uint8_t I2C_ReadByte(void);
void set_AHT20sendOutData(void);
void I2C_Start(void);
void I2C_Stop(void);
#endif
//main.c
#include "delay.h"
#include "usart.h"
#include "bsp_i2c.h"
int main(void)
{
delay_init(); //ÑÓʱº¯Êý³õʼ»¯
uart_init(115200); //´®¿Ú³õʼ»¯Îª115200
IIC_Init();
while(1)
{
printf("¿ªÊ¼²âÁ¿£¬ÇëÉԵȣº");
read_AHT20_once();
delay_ms(1500);
}
}
















 736
736











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











