







stm32 freeRTOS 任务管理实验 (HAL版)
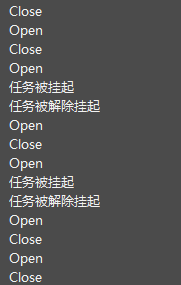
此实验是通过按键1和按键2来对LED进程实现挂起和恢复的,LED进程为闪烁,当按下按键1时,LED停止闪烁,同时通过串口输出“任务被挂起”,当按下按键2是,LED继续闪烁,同时通过串口助手输出“任务被解除挂起”。同时当LED闪烁时,串口会按照LED的状态输出“Open”和“Close”。
实验过程:
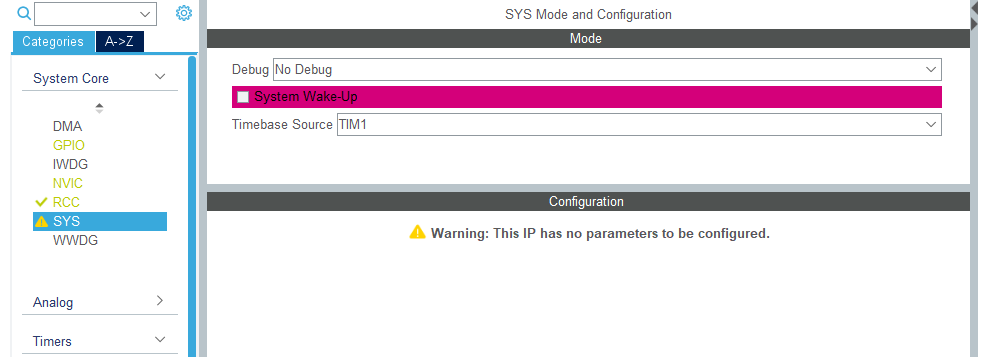
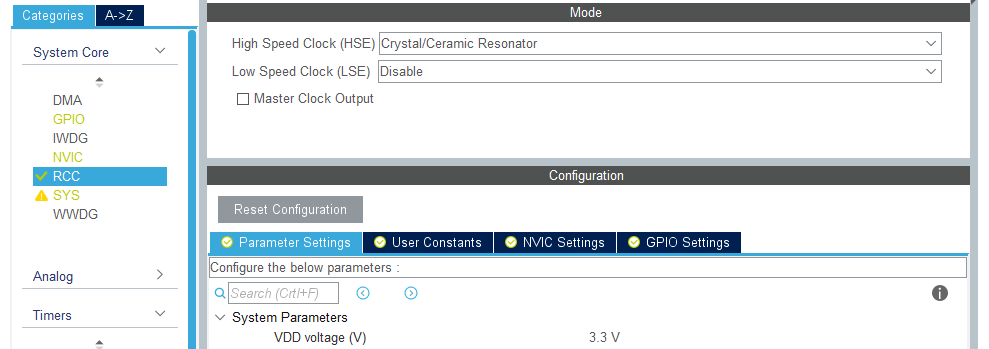
首先配置HAL

同时配置自己所需要的GPIO和USART。
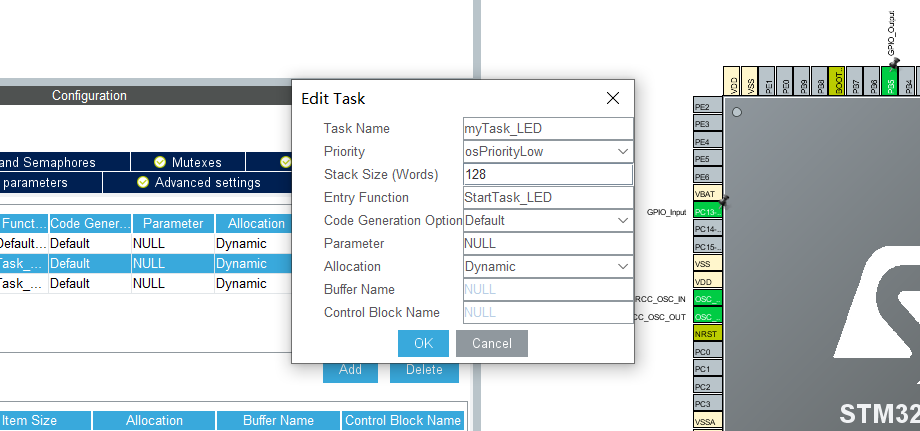
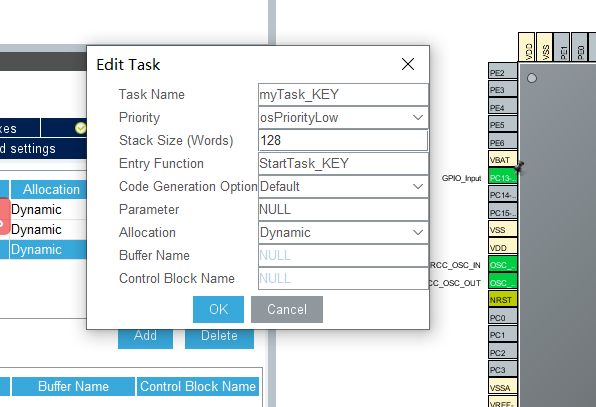
然后就代码部分的编写了,在freertos,c里面

实验结果如下:
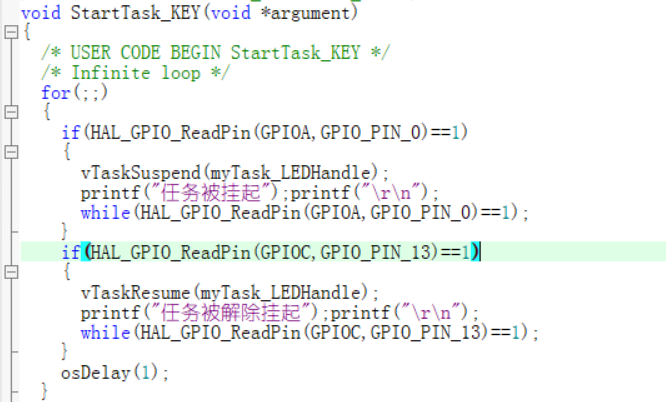
关键代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* File Name : freertos.c
* Description : Code for freertos applications
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2022 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under Ultimate Liberty license
* SLA0044, the "License"; You may not use this file except in compliance with
* the License. You may obtain a copy of the License at:
* www.st.com/SLA0044
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
/* USER CODE END Variables */
/* Definitions for defaultTask */
osThreadId_t defaultTaskHandle;
const osThreadAttr_t defaultTask_attributes = {
.name = "defaultTask",
.priority = (osPriority_t) osPriorityNormal,
.stack_size = 128 * 4
};
/* Definitions for myTask_LED */
osThreadId_t myTask_LEDHandle;
const osThreadAttr_t myTask_LED_attributes = {
.name = "myTask_LED",
.priority = (osPriority_t) osPriorityLow,
.stack_size = 128 * 4
};
/* Definitions for myTask_KEY */
osThreadId_t myTask_KEYHandle;
const osThreadAttr_t myTask_KEY_attributes = {
.name = "myTask_KEY",
.priority = (osPriority_t) osPriorityLow,
.stack_size = 128 * 4
};
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
void StartDefaultTask(void *argument);
void StartTask_LED(void *argument);
void StartTask_KEY(void *argument);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/**
* @brief FreeRTOS initialization
* @param None
* @retval None
*/
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* creation of defaultTask */
defaultTaskHandle = osThreadNew(StartDefaultTask, NULL, &defaultTask_attributes);
/* creation of myTask_LED */
myTask_LEDHandle = osThreadNew(StartTask_LED, NULL, &myTask_LED_attributes);
/* creation of myTask_KEY */
myTask_KEYHandle = osThreadNew(StartTask_KEY, NULL, &myTask_KEY_attributes);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartDefaultTask */
/**
* @brief Function implementing the defaultTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void *argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
for(;;)
{
osDelay(1);
}
/* USER CODE END StartDefaultTask */
}
/* USER CODE BEGIN Header_StartTask_LED */
/**
* @brief Function implementing the myTask_LED thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_LED */
void StartTask_LED(void *argument)
{
/* USER CODE BEGIN StartTask_LED */
/* Infinite loop */
for(;;)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_SET);
printf("Close\r\n");
vTaskDelay(1000);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_RESET);
printf("Open\r\n");
vTaskDelay(1000);
osDelay(1);
}
/* USER CODE END StartTask_LED */
}
/* USER CODE BEGIN Header_StartTask_KEY */
/**
* @brief Function implementing the myTask_KEY thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask_KEY */
void StartTask_KEY(void *argument)
{
/* USER CODE BEGIN StartTask_KEY */
/* Infinite loop */
for(;;)
{
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==1)
{
vTaskSuspend(myTask_LEDHandle);
printf("任务被挂起");printf("\r\n");
while(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==1);
}
if(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_13)==1)
{
vTaskResume(myTask_LEDHandle);
printf("任务被解除挂起");printf("\r\n");
while(HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_13)==1);
}
osDelay(1);
}
/* USER CODE END StartTask_KEY */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
/* USER CODE END Application */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/















 1223
1223











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









