







免责声明:本文所提供的信息和内容仅供参考。作者对本文内容的准确性、完整性、及时性或适用性不作任何明示或暗示的保证。在任何情况下,作者不对因使用本文内容而导致的任何直接或间接损失承担责任,包括但不限于数据丢失、业务中断或其他经济损失。
读者在使用本文信息时,应自行验证其准确性和适用性,并对其使用结果负责。本文内容不构成专业技术咨询或建议,具体的技术实现和应用应根据实际情况和需要进行详细分析和验证。
本文所涉及的任何商标、版权或其他知识产权均属于其各自的所有者。若本文中引用了第三方的资料或信息,引用仅为学术交流目的,不构成对第三方内容的认可或保证。
若有任何疑问或需进一步信息,请联系本文作者或相关专业人士。
前言
小编最近在学习ISP的相关知识,想研究算法并部署到MPSOC上,今天跟着小编一起学习IMATEST的Color Correction Matrix文档吧。
一、Introduction
CCM 计算
-
计算CCM需要至少9个不同颜色的色块,但通常使用24色块的X-Rite ColorChecker色卡。
-
3×3 CCM(推荐)和 4×3 CCM 是不同的矩阵计算方法:
-
3×3 CCM: 只考虑颜色通道(R, G, B)之间的线性关系,通常用于色彩校正。
-
4×3 CCM: 额外考虑偏移项(偏移量用于处理零点漂移)。
-
-
计算CCM的方法是最小均方误差(MSE, Mean Squared Error),目标是让校正后的色块与标准参考值的色差最小。
颜色误差计算
-
误差默认是使用ΔE 2000 或 ΔE 94(这两种计算方式类似)。
-
计算时:
-
只考虑亮度在 5 ≤ L ≤ 98 之间的色块(避免极暗或极亮区域)。
-
只考虑RGB通道未达到饱和的色块(RGB < 99%)。
-
线性化(Linearization)
-
CCM 计算要求输入的 R, G, B 值是线性的,否则矩阵计算会出现偏差。
-
为什么需要线性化?
-
许多图像格式(如sRGB、JPEG)默认使用了伽马校正(非线性)。
-
在计算CCM之前,必须去除伽马影响,使RGB值回归线性,以保证矩阵变换正确。
-
二、Sequence of operations — The Flow chart
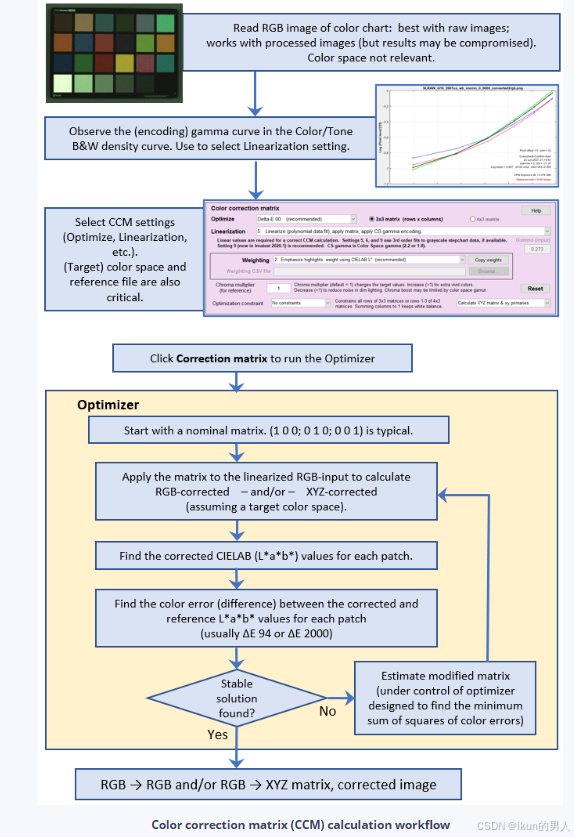
流程大致如下:
-
读取RGB图像(建议使用RAW图像,以避免预处理影响)。
-
观察伽马曲线,选择适当的线性化设置。
-
选择CCM设置,包括优化模式、线性化选项等,同时指定目标色彩空间和参考文件。
-
运行优化器:
-
以初始矩阵开始(通常为单位矩阵)。
-
计算校正后的RGB值或XYZ色彩空间值。
-
计算每个色块的 CIELAB(Lab)值。
-
计算校正后的 Lab 值与参考值之间的色差(如 ΔE94 或 ΔE2000)。
-
通过优化器调整矩阵,最小化色差。
-
迭代计算,直到找到稳定解。
-
-
输出最终颜色校正矩阵,用于将RGB转换到目标色彩空间或XYZ色彩空间
三、The Math
1.图像数据结构
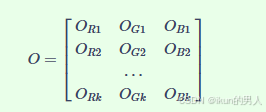
彩色图像存储为 m×n×3 数组(高度 × 宽度 × RGB通道)。处理时,图像被展开为 k×3 的二维矩阵 O(k=m×n),每一行对应一个像素的 线性化 RGB 值。
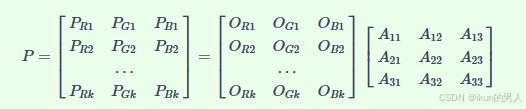
2.颜色校正矩阵
通过一个 3×3 的矩阵 A 对原始数据 O 进行线性变换,得到校正后的矩阵 P:
P = OA
每个校正后的像素通道值(R/G/B)是原始像素三个通道的加权和。例如:

3.线性化要求
输入数据 O 必须是线性亮度值。若原始图像为非线性编码(如 sRGB),需先通过逆 Gamma 变换进行 线性化。校正后的结果 P 可能需要重新应用 Gamma 曲线(去线性化)以适配显示设备。
四、算法迭代逼近
通过调整颜色校正矩阵 A,使校正后的像素矩阵 P = OA 与参考矩阵 R(理想值)之间的差异最小化(常见方法均方误差MSE)。
初始矩阵的构造
初始矩阵 A 的两种形式(3×3 和 4×3)均为对角矩阵,旨在通过均值比例初步对齐原始数据与参考数据的通道增益:
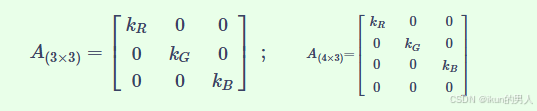
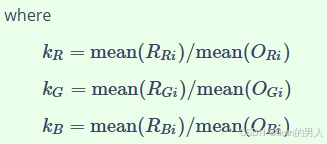
-
初始值意义:均值比例提供粗略的通道增益,加速优化收敛。
优化算法通过迭代调整颜色校正矩阵 A,使校正后的像素数据 P = OA 逼近参考数据 R。以下是具体步骤及示例:
优化流程
1.定义损失函数
通常采用均方误差(MSE)衡量 P 与 R 的差距:

其中 k 为像素总数,3k 是总通道数(R/G/B)。
2.计算梯度
梯度矩阵 表示损失函数对 A 中各元素的偏导数。通过矩阵运算高效计算:
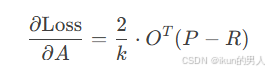
其中 是原始数据矩阵的转置,P−R 是误差矩阵。
3.更新矩阵 A
使用梯度下降法更新 A:
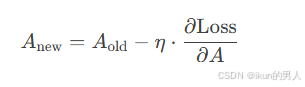
η 为学习率,控制更新步长。
4.迭代优化
重复计算 P、损失、梯度和更新 A,直到损失收敛或达到最大迭代次数
五、计算示例
输入数据 O(2个像素,( k=2)):
参考数据 R:
初始矩阵 A(3×3):
根据均值计算初始增益系数:

初始矩阵:
学习率:η=0.1
迭代过程
第1次迭代
1.前向计算
2.计算损失
3计算梯度
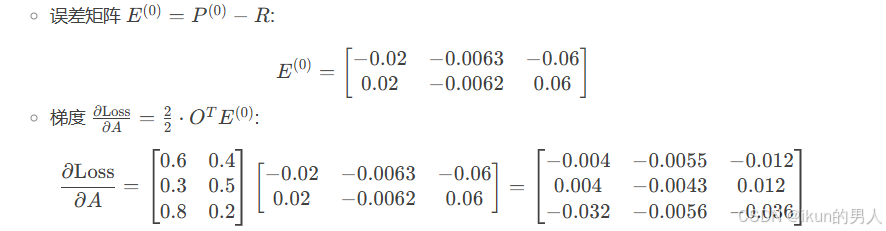
4.更新矩阵 A
第2次迭代
1.前向计算
2.计算损失
3.继续更新矩阵 A(步骤略,类似第一次迭代)。经过第二次迭代后,损失进一步下降至 0.0035


















 793
793

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









