







假定目标做匀速直线运动,在单个观测站对目标进行观测的前提下,再假设目标的初始状态已知。目标的运动方程可以写成如下形式:
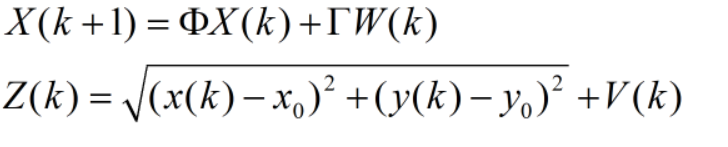
其中:

设采样时间间隔T=1s,运行时间为N=60s,W(k)的均方差为![]() ,
,![]() 为一个可调节的参数,其远小于1,V(k)均方差为R=5。同时设置UT变换中的相关系数,
为一个可调节的参数,其远小于1,V(k)均方差为R=5。同时设置UT变换中的相关系数,![]() ,维数为9,雷达位置设为(200,300).假设目标运动各时刻的真实状态信息为:
,维数为9,雷达位置设为(200,300).假设目标运动各时刻的真实状态信息为:![]() ,而利用UKF滤波算法得到的目标状态为:
,而利用UKF滤波算法得到的目标状态为:![]()
定义均方根误差(RMSE):![]()
仿真结果:
假定目标做匀速直线运动,在单个观测站对目标进行观测的前提下,再假设目标的初始状态已知。目标的运动方程可以写成如下形式:
其中:
设采样时间间隔T=1s,运行时间为N=60s,W(k)的均方差为![]() ,
,![]() 为一个可调节的参数,其远小于1,V(k)均方差为R=5。同时设置UT变换中的相关系数,
为一个可调节的参数,其远小于1,V(k)均方差为R=5。同时设置UT变换中的相关系数,![]() ,维数为9,雷达位置设为(200,300).假设目标运动各时刻的真实状态信息为:
,维数为9,雷达位置设为(200,300).假设目标运动各时刻的真实状态信息为:![]() ,而利用UKF滤波算法得到的目标状态为:
,而利用UKF滤波算法得到的目标状态为:![]()
定义均方根误差(RMSE):![]()
仿真结果:
 4104
4104











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















