






本文只是介绍如何使用Y2SSR4步进电机驱动器,对于步进电机的原理相信有更好的文章。
简单介绍一下:步进电机是将脉冲信号转换成机械运动的一种特殊电机。步进电机在使用时不需要额外的反馈,这是因为除非失步,否则步进电机每次转动时的角度已知的,由于它的角度位置已知就能精确控制电机运动的位置。可以理解为控制步进电机的信号是脉冲信号,收到一个脉冲信号走转一下,但具体情况需要根据步进电机驱动器的控制方式来确定。
需要注意的是:步进电机以越快的速度运行,所能输出的转矩越小,驱动步进电机的脉冲频率不能太高,一般不超过2KHz,否则电机输出的力矩迅速减小。转矩过小可能会造成步进电机失步,转动角度出现错误。
Y2SSR4是一款直流输入两相的步进电机驱动器,简单来说就是其主要控制方式为两相直流输入的方式进行控制。其输入电流为1.0~4.5A、输入电压为24~48VDC,控制信号5-24V兼容,能够用于控制57~86mm步进电机,因此该驱动器能够适用于大多数的控制场景中。

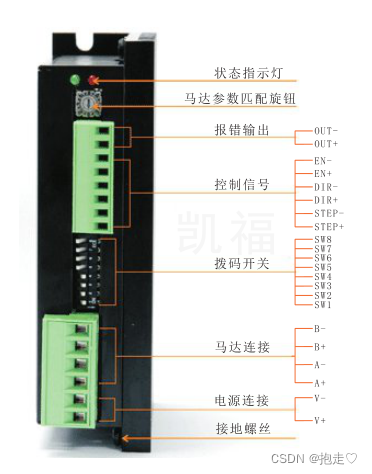
上图是驱动器的各部分名称和功能。
一、首先是状态指示灯,用于反应驱动器的工作状态。注意,绿灯闪亮时,驱动器处于正常工作状态,如果出现红色提示灯闪亮则意味着出动器出错。
| 状态 | 故障 | 原因 |
| 绿灯闪烁 | 驱动器工作正常 | |
| 绿灯常亮 | 驱动器未使能 | EN端口有高电平输入 |
| 4红1绿 | 驱动器电源输入过压 | 供电电压大于48VDC |
| 5红1绿 | 驱动器过流 | 电机接线错或接触不良 |
| 6红1绿 | 电机绕组开路 | 电机未接好 |
| 3红2绿 | 驱动器内部电压出错 | 电源功率太小 |
| 4红2绿 | 驱动器电源输入欠压 | 供电电压小于24DC |
二、 电机参数匹配旋钮
旋钮位置与匹配电机转子惯量对应关系如下。关于如何计算马达转子惯量我就不献丑了。正常使用时,可以调整在2/A档。
| 旋钮位置 | 匹配电机转子惯量 |
| 0/8 | 10 g.cm^2以下 |
| 1/9 | 30 g.cm^2以下 |
| 2/A | 50 g.cm^2以下 |
| 3/B | 80 g.cm^2以下 |
| 4/C | 100 g.cm^2以下 |
| 5/D | 200 g.cm^2以下 |
| 6/E | 400 g.cm^2以下 |
| 7/F | 400 g.cm^2以上 |
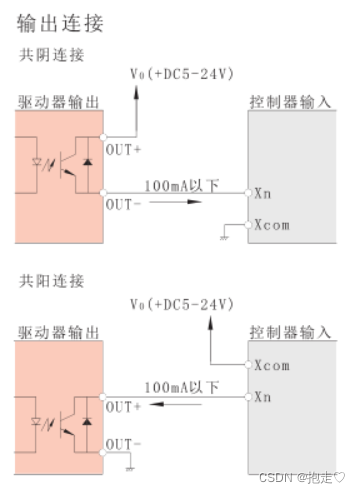
三、报错输出
将驱动器报错输出与控制器连接。在运行出错的情况下能够返回值控制端采取措施(可以不连)。
连接方式如下:
四、电机、控制、电源接线
可以简单按照下图连接,尽管驱动器信号可能不一样,连接方式大致相同,注意共地。对ENA端有需求就和方向或脉冲端的输入类似连接就好。
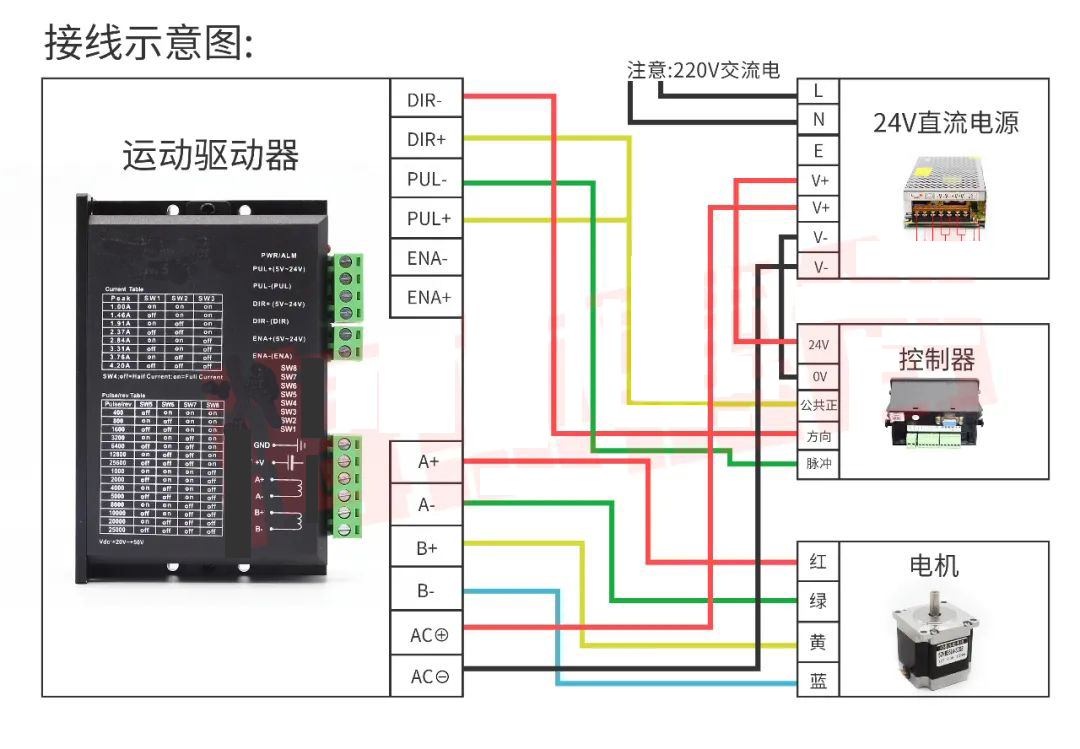
图中控制端采取的连接方式是共阳极连接,也有共阴极连接。也就是吧DIR-、PUL-连接共地,DIR+和PUL+分别连接控制端方向和脉冲信号。
(注意:对于有些驱动器,输入端要求电压为5V,无法直接与24VDC连接,有的是要求串接电阻)
该驱动器输入信号为:
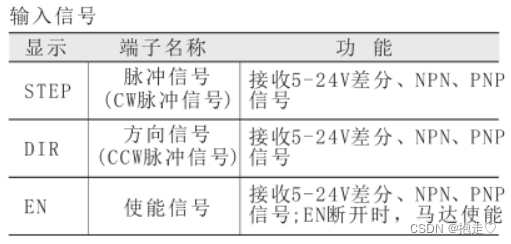
该驱动器采用的控制方式为CW/CCW的方式,即电机转动方向取决于脉冲信号和方向信号的相位差,如果脉冲信号在前为顺时针转动,方向信号在前为逆时针转动,而转动的角度取决脉冲的数量、细分设置和步距角。
脉冲数就是控制器提供的输入方波数,可以使用定时器来设置;细分设置则是通过改变拨码进行设置,正常来说驱动器正面会印有细分表,查表设置即可,本质就是将一个方波脉冲又分成多少份来使控制精度提高,取合适值即可。在电机实际使用时,如果对转速要求较高,且对精度和平稳性要求不高的场合,不必选高细分。在实际使用时,如果转速很低情况下,应该选大细分,确保平滑,减少振动和噪音;步距角则是使用电机的一项参数,查电机参数就可以找到,大部分步进电机步距角为1.8°,即不采用细分需要200个脉冲能够转动一圈。
具体怎么算可以参考以下模型:
设置驱动器SW5,6,7为ON、OFF、ON,查驱动器上的表,能够得到对应1/8,意味着原本200个脉冲能够时1.8°步进电机转动一圈,现在需要使用1600个脉冲。
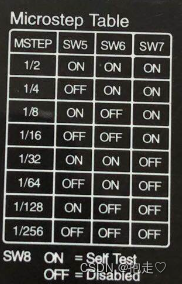

【上图SW8是测试的一个设置,SW8打开时,驱动器通电后会自动发送脉冲使电机转动,用来判断驱动器以及步进电机是否损坏,正常使用时设置SW8为OFF】
本人在使用时还遇到步进电机在通电后仍然能拨动的问题。因为步进电机在通电后是会锁死的,不给信号是无法转动的,原因其实只是步进电机驱动的东西比较重,扭矩不够了导致锁死的电机被强掰着转动了,这种情况容易导致控制过程中丢步。。。。。。。。。只需要更换大扭矩步进电机就能解决,对于丢步问题可以尝试伺服电机,毕竟一个是开环控制,一个是闭环控制,闭环控制更精确。
希望能对您有所帮助,如有错误请指正,谢谢

















 10万+
10万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









