









 本文介绍了YOLOv5的目标检测原理,并详细阐述了利用单目相机通过相似三角形法计算物体距离和尺寸的原理。通过实例展示了如何计算物体与相机的距离,以及如何反推出物体的实际尺寸。YOLOv5因其高速、高精度和易用性在目标检测领域表现出色。
本文介绍了YOLOv5的目标检测原理,并详细阐述了利用单目相机通过相似三角形法计算物体距离和尺寸的原理。通过实例展示了如何计算物体与相机的距离,以及如何反推出物体的实际尺寸。YOLOv5因其高速、高精度和易用性在目标检测领域表现出色。
目录
1,YOLOv5原理介绍
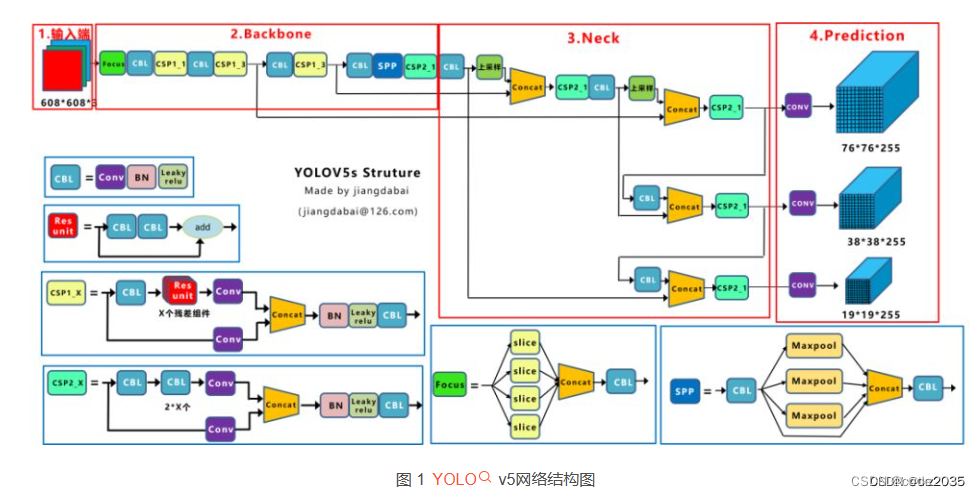
YOLOv5是目前应用广泛的目标检测算法之一,其主要结构分为两个部分:骨干网络和检测头。
骨干网络采用的是CSPDarknet53,这是一种基于Darknet框架的改进版卷积神经网络。CSPDarknet53通过使用残差结构和跨层连接来提高网络的表达能力,并且采用了空洞空间金字塔池化(ASPP)来实现多尺度的信息提取。这样设计的骨干网络具有较强的特征提取能力,可以有效地提取出图像中的目标信息。
检测头是YOLOv5的另一个关键组成部分,主要用于从骨干网络特征图中提取目标检测信息。它由三个子模块组成:SPP、PAN和YOLOv5输出层。
SPP模块:空洞空间金字塔池化模块,用于对特征图进行多尺度的池化和下采样操作,从而实现对不同大小的目标进行检测。
PAN模块:特征金字塔自上而下的路径,用于将不同层次的特征图融合在一起,并进行上采样操作,以便将低分辨率的特征图与高分辨

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 6938
6938

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











