






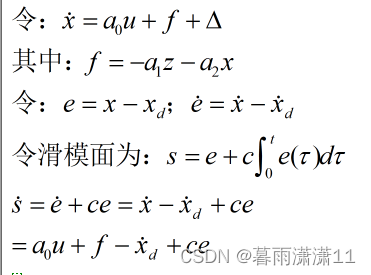
本次滑模控制器设计中,我采用的是一阶BW模型来设计我的滑模控制器,模型的表达式如下。

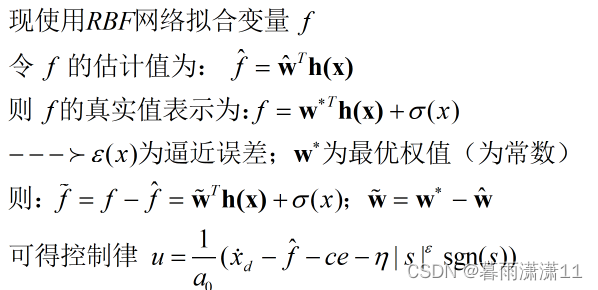
接下来设计基于RBF神经网络的滑模控制器。
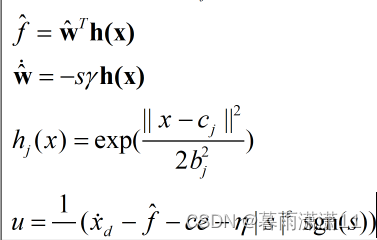
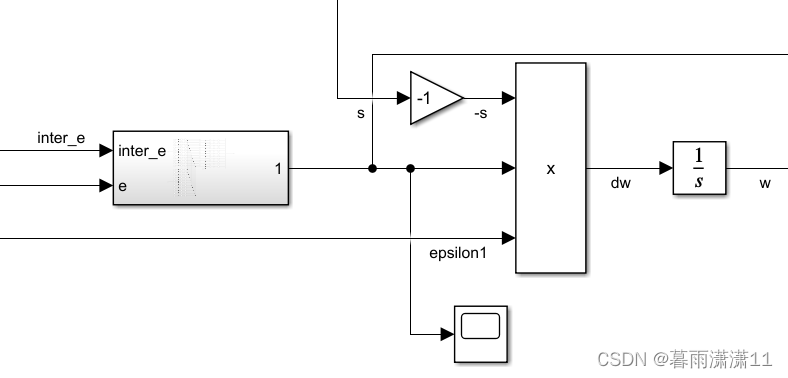
接下来求RBF神经网络的权值更新律,

及如下的表达式需要我们进行搭建 ,
首先是RBF神经网络的径向基函数hj(x);需要注意的是二范数的表达式如下
 所以我们的simulink模型可以这样绘制
所以我们的simulink模型可以这样绘制
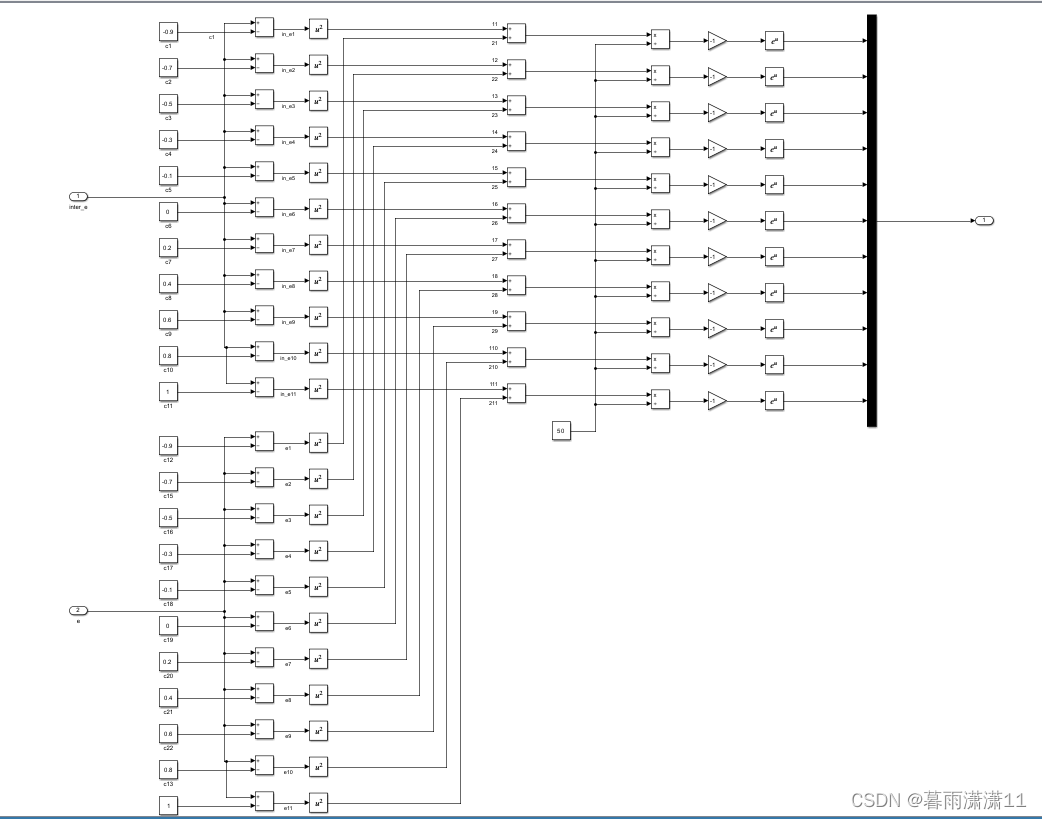

这里是11个神经元的RBF径向基函数计算方式。径向基函数hj(x)解决了之后,我们就来搭建RBF权值的更新律,下面这张图就是RBF权值的更新表达式。
搭建完RBF神经网络之后,我们就可以来搭建滑模控制律了。滑模控制律如下:
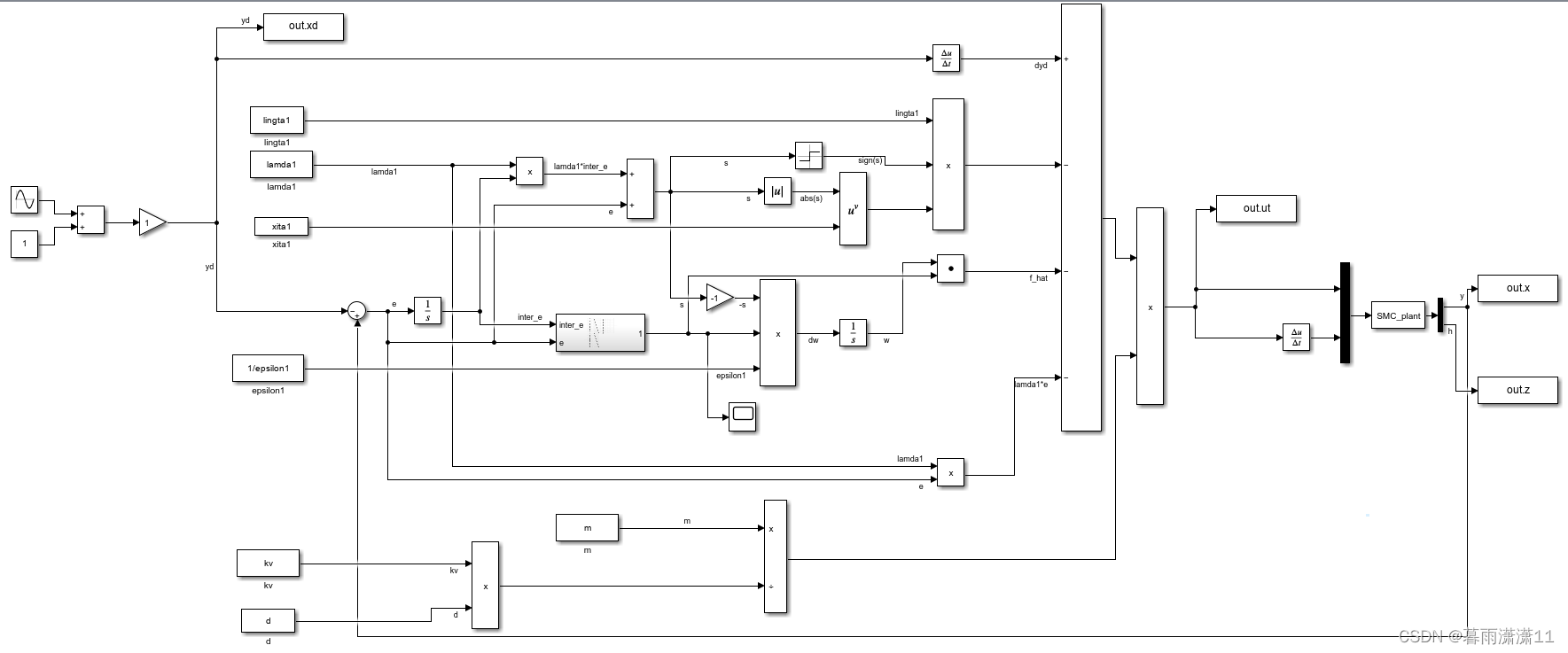
最后本次设计的RBF滑模控制器仿真效果如下:

搭建simulink模型的原因在于,我在将simulink程序编译到快速控制平台上时,S函数无法进行编译,所以我选择绕开S函数,直接用simulink其他模块进行搭建。















 1010
1010











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









