







文章目录
- 1、基本构成
- 2、机器人本体
- 3、伺服电机
- 4、减速器
- 5、控制器
- 6、示教器
1、基本构成
-
根据应用领域的不同,机器人可分为工业机器人、服务机器人、特种机器人等类型,其中工业机器人是智能制造的核心部分,其定义为:面向工业领域的多关节机械臂或多自由度的机器人。工业机器人是靠自身动力和控制能力来实现各种功能的一种自动执行工作的机器,其常见构型如下图所示。它可以通过人类示教运动,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
-
工业机器人的典型应用包括焊接、装配、打磨、喷涂和搬运放置(例如包装和码垛)等,机器人可有效代替人类完成高危及重复性工作,且具有高效性、持久性、速度和准确性。
-
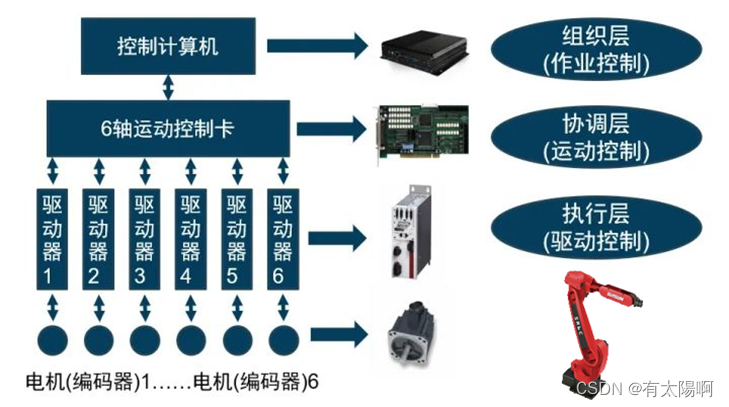
工业机器人主要由主体、驱动系统和控制系统三个基本部分组成。本章将基于机器人构成及控制框架对各部分进行详细介绍。
(1)主体。机器人主体即机座和执行机构,包括臂部、腕部和手部,部分机器人还存在行走机构;
(2)驱动系统。包括动力装置和传动机构,核心为伺服电机和减速器,用以使执行机构产生相应的动作;
(3)控制系统。通过程序指令下发或示教器操作,经由机器人控制器对驱动系统和执行机构发出控制信号。
2、机器人本体
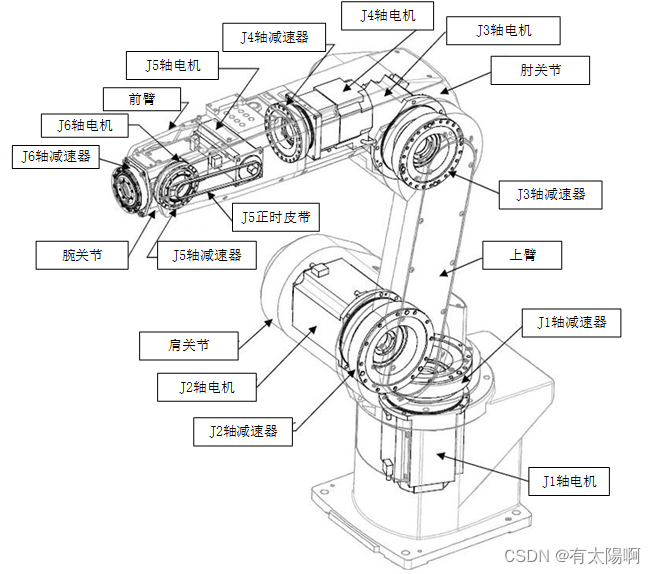
- 本体是工业机器人的重要组成部分,所有的计算、分析、控制和编程最终要通过本体的运动和动作完成特定的任务。其基本结构由传动部件、基座、臂部、腕部、手部组成,如下图所示。
- 手部是工业机器人直接与工件或工具接触,用来完成握持工件或工具的部件。有些工业机器人直接将工具(如焊枪、喷枪)装在手部位置,而不再设置手部。根据被抓取工件、工具等的形状、尺寸、重量和表面粗糙度等不同特性,在工业生产中可使用多种形式的手部机构,最常见的是钳爪式、磁吸式和气吸式。另外,手部与手腕相连处应该可拆卸,手部与手腕有机械接口或电、气、液接头,以方便工业机器人不同作业对象时的手部拆卸和更换。
- 腕部是用来连接工业机器人的手部与臂部、确定手部工作位置并扩大臂部动作范围的部件。有些专用机器人没有手腕部件,而是直接将手部安装在手臂部件的端部。工业机器人的腕部常用来调整工业机器人的姿态,即具有滚动、俯仰和偏航角度的调整功能。
- 臂部是工业机器人用来支撑腕部和手部,实现较大运动范围的部件。它不仅承受被抓取工件的重量,而且承受末端操作器、手腕和手臂自身重量。臂部的结构、工作范围、灵活性、臂力和定位精度都直接影响机器人的工作性能。
基座是整个工业机器人的支撑部分,有固定式和移动式两种。其中,移动式机构是工业机器人用来扩大活动范围的机构,有的采用专门的行走装置,有的采用轨道、滚轮机构。
3、伺服电机
- 伺服电机是机器人的执行机构,可以将电流信号转化为转矩和速度信号,控制机器人实现机器人关节运动,因此又称之为执行电动机,如下图所示。伺服电机作为工业机器人的动力系统,随着工业自动化和智能制造的发展,对其精度、体积等要求也愈发严格,最大功率质量比、扭矩惯量比、高启动转矩、低惯量和较宽广且平滑的调速范围成为了伺服电机未来发展指标。
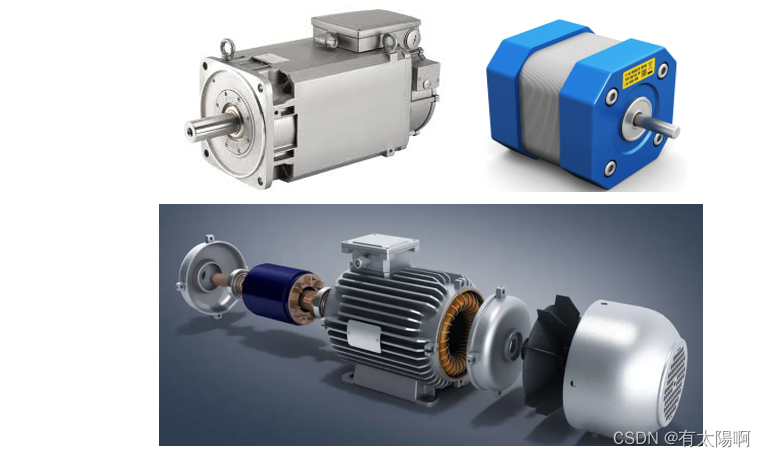
- 伺服电机主要分为两大类:交流伺服电机和直流伺服电机。
(1)交流伺服电机的基本构造与交流感应电动机(异步电机)相似,其结构可分为定子部分和转子部分。其中定子的结构与旋转变压器的定子基本相同,在定子铁心中安放着空间互成90度的两相绕组。其中一组为激磁绕组,另一组为控制绕组。交流伺服电动机使用时,激磁绕组两端施加恒定的激磁电压Uf,控制绕组两端施加控制电压Uk。利用施加到定子绕组上的电压或相位的变化,达到控制电机运行的目的。交流伺服电机具有运行稳定、可控性好、响应快速、灵敏度高以及机械特性和调节特性的非线性度指标严格等特点。
(2)直流伺服电机特指直流有刷伺服电机,具有良好的线性调节特性及快速的时间响应,其电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,维护方便,但会产生电磁干扰。直流伺服电机还包括直流无刷伺服电机,其电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定,易实现智能化,不存在碳刷损耗的情况,效率高,运行温度低噪音小,电磁辐射很小,长寿命,可用于各种环境,但电机功率有局限。
4、减速器
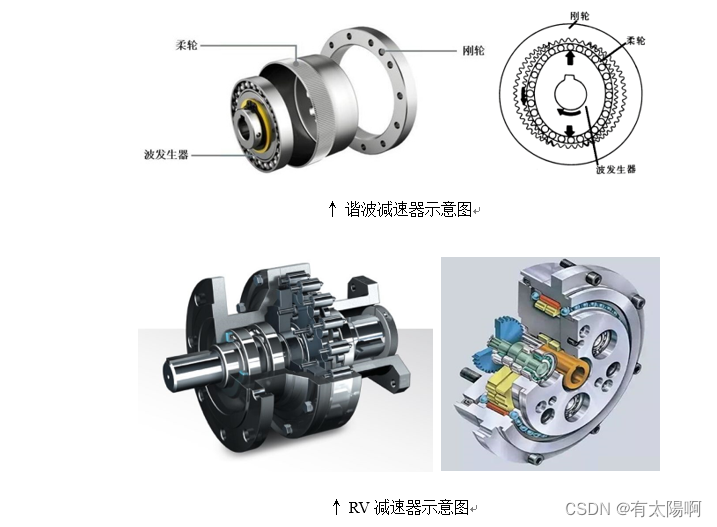
- 减速器负责把伺服电机运转的动力通过齿轮咬合来达到减速目的,并传递更大的转矩。工业机器人的每个“关节”都要用到不同的减速器,主要有两类:RV减速器和谐波减速器,如下图所示。一般将RV减速器放置在机座、大臂等重负载的位置(通常为第一至第四关节),主要用于20公斤以上的机器人关节;而将谐波减速器放置在小臂、腕部或手部等轻负载的位置,对于重载工业机器人,则所有关节都需要使用RV减速机。
- RV减速机具有较高的疲劳强度、刚度和寿命疲劳强度,且回差精度稳定,不像谐波传动那样随着使用时间增长运动精度就会显著降低,其价格也一般为谐波减速器的2倍。全球绝大多数市场份额都被日本企业占据:Nabtesco(纳博特斯克)的RV减速器约占60%,Harmonica的谐波减速器约占15%。
5、控制器
- 机器人控制器作为工业机器人最为核心的零部件之一,对机器人的性能起着决定性的影响,在一定程度上影响着机器人的发展。
- 工业机器人控制器的主要任务是接收来自视觉传感器、力传感器的检测信号,根据操作任务的要求,驱动机械臂中的各个伺服电机,进而控制机器人在工作空间中的运动位置、运动姿态、速度、轨迹、操作顺序及动作的时间。控制器通常具有各类输入输出接口,可以对机械臂的动作进行监视,当机器人发生错误或故障时及时发出报警信号并中断运动。
- 控制器与机器人本体一样,一般由机器人厂家自主设计研发。目前主流机器人厂商的控制器均为在通用的多轴运动控制器平台基础上进行自主研发,各品牌机器人均有自己的控制系统与之匹配,FANUC、KUKA、ABB、安川分别占据前四名,国内企业控制器尚未形成市场竞争优势。

- 如上图所示,控制器机柜中通常包含两个模块:主计算机(控制模块)、驱动模块。主计算机运行操作机器人所需的所有软件,而驱动模块包含为机器人电机供电的所有电源电子设备。
6、示教器
- 示教器是进行机器人手动操纵、程序编写、参数配置以及监控用的手持装置。
- 主要由连接电缆、触摸屏用笔、示教器复位按钮、急停开关、使能器按钮、触摸屏、手动摇杆、USB接口等部分组成。示教器使用户能够通过使用钥匙将机器人的操作模式从示教模式和无限制操作之间相互切换,从而控制使能开关以避免可能发生的危险。示教器可以用来监控机器人和工作单元中的所有设备,从而判断机器人可能的行为错误,并实现对机器人程序的实时调整和报警。


















 1468
1468

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









