







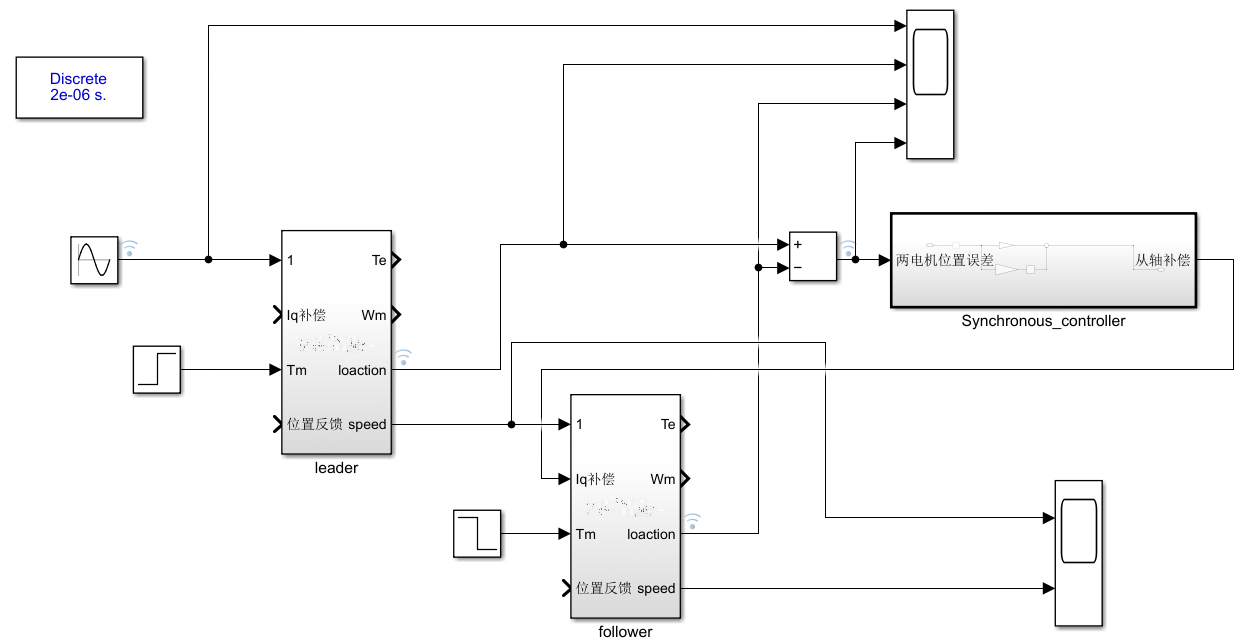
使用主从结构框架,增加从轴龙门补偿模块,改善从轴滞后情况。
 整体建模
整体建模
主电机采用位置三环控制,输入信号指令为位置信号,从电机为速度环与电流环控制,输入信号是主电机的输出速度;从电机跟随主电机速度指令进行运动,主从结构会造成较大的滞后误差,龙门同步要求位置同步,此时需要增加补偿模块,将从电机滞后的部分补偿进来。同步补偿模块就是一个PI调节器,输入是主从电机位置误差,输出是从电机Iq补偿值;理论上说这个补偿值能补偿在速度环,位置环,电流环都行,但是电流环带宽大,响应速度快,故选择电流内环增加补偿比较合理,在增加补偿iq之后需要限制iq输出,iq不能超出规定的输出范围。
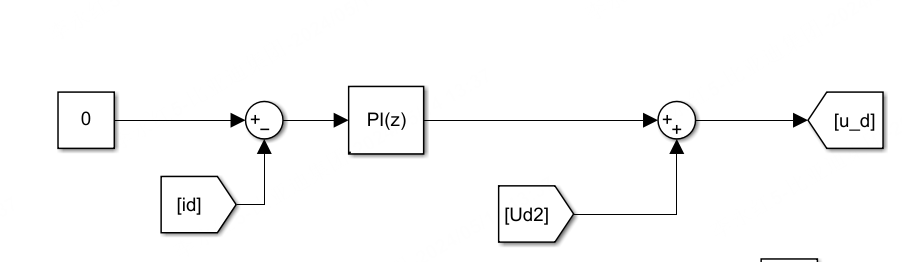
Id=0控制模块,电流内环与外环的PI参数都是一样的,P=Ls1/(3*Ts);I=Rs1/(3*Ts),从电机也是一样的,Ls与Rs改为从电机电机参数就行。
速度环&电流内环,iq补偿之后从电机增加,此处是主电机建模,可以删掉这个输入。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6165
6165

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









