






此模型为电机频域模型,各环节用传函代表。
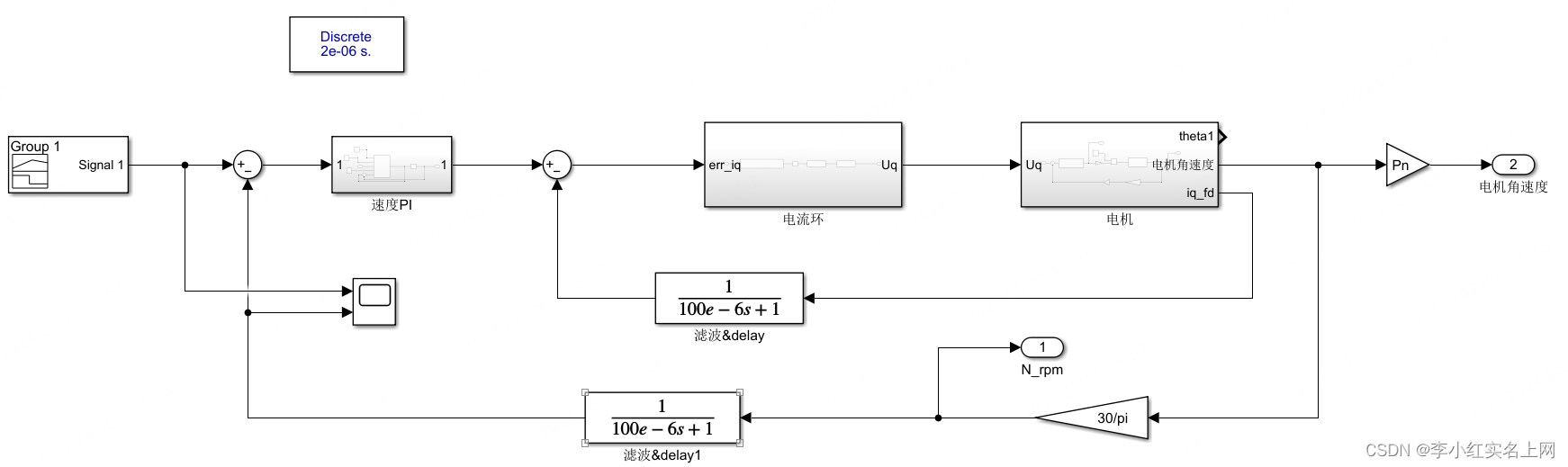
电机采用Id=0控制,所以建模直接省略掉Id这个电流外环,只建立速度环与电流内环.
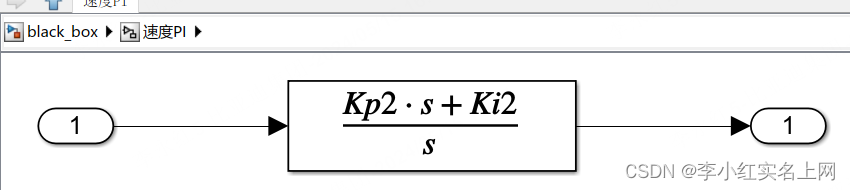
PI调节器传递函数 ,电流环存在逆变器模型,简单看作惯性环节,系统种还存在采样滞后和采样增益也看做一个惯性环节数据反馈也存在滞后。
频域组成:PI控制器+逆变器惯性环节+采样惯性环节+电机传函+反馈滞后&滤波
速度PI调节器
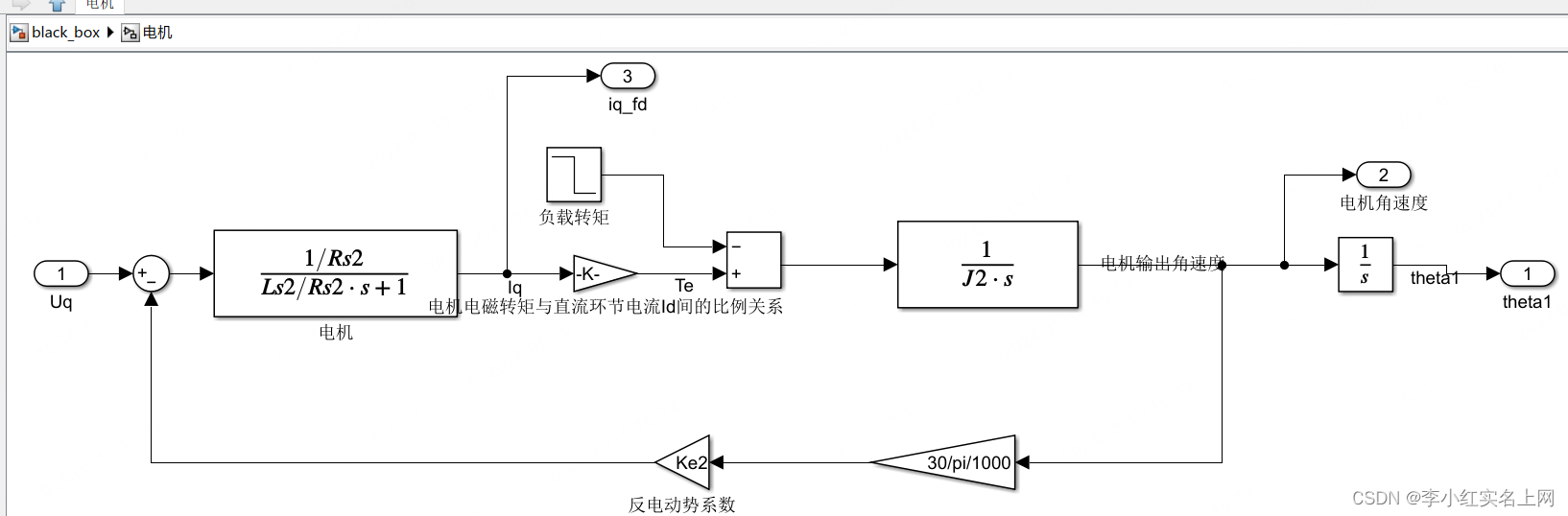
电流环

电机--按照电压平衡方程建立模型

公式最后一项Wr*Phif=反电动势,下面的建模没错。
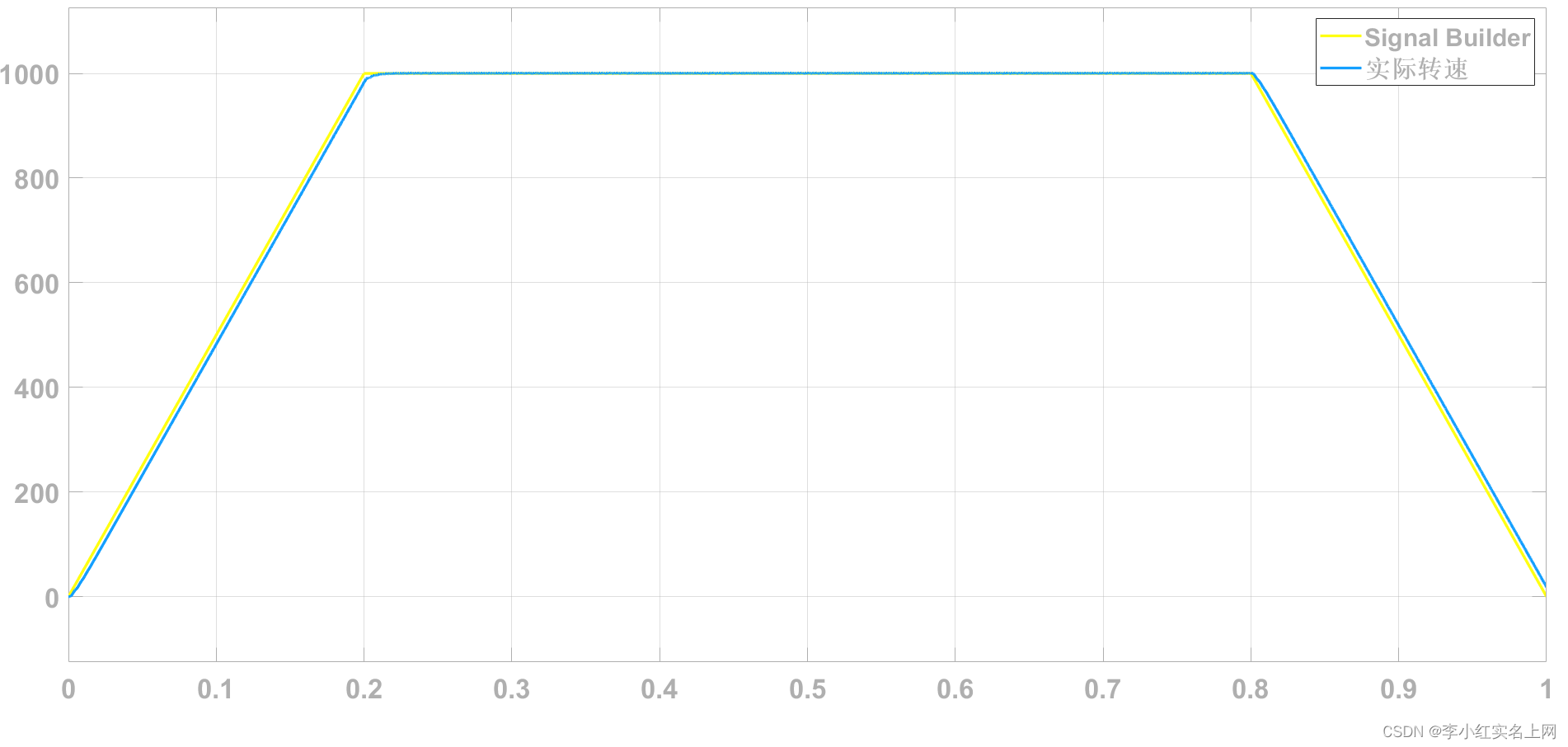
转速给定与反馈如下
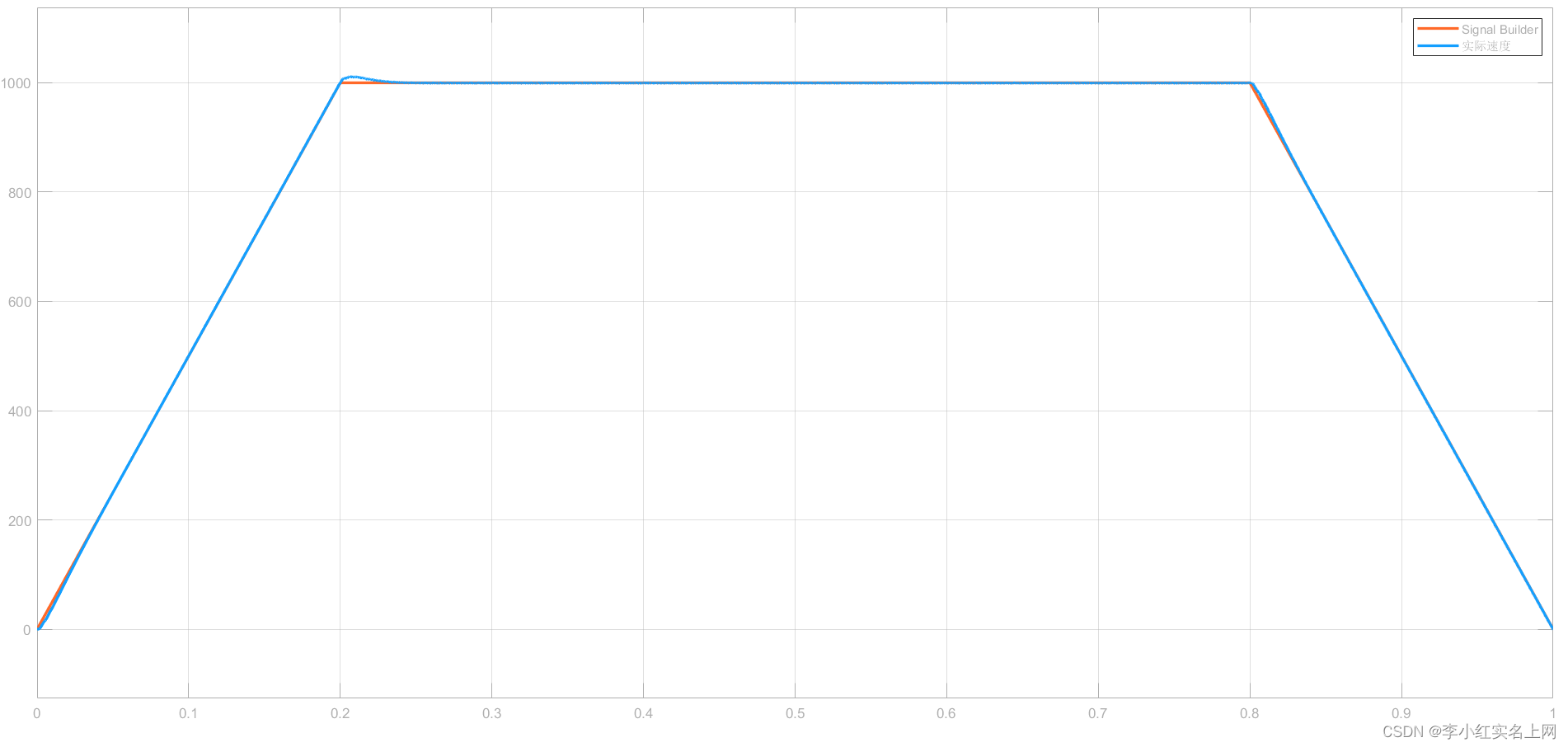
存在一点点超调,整体跟踪效果还可以
有优化的空间,下面加入抗积分饱和
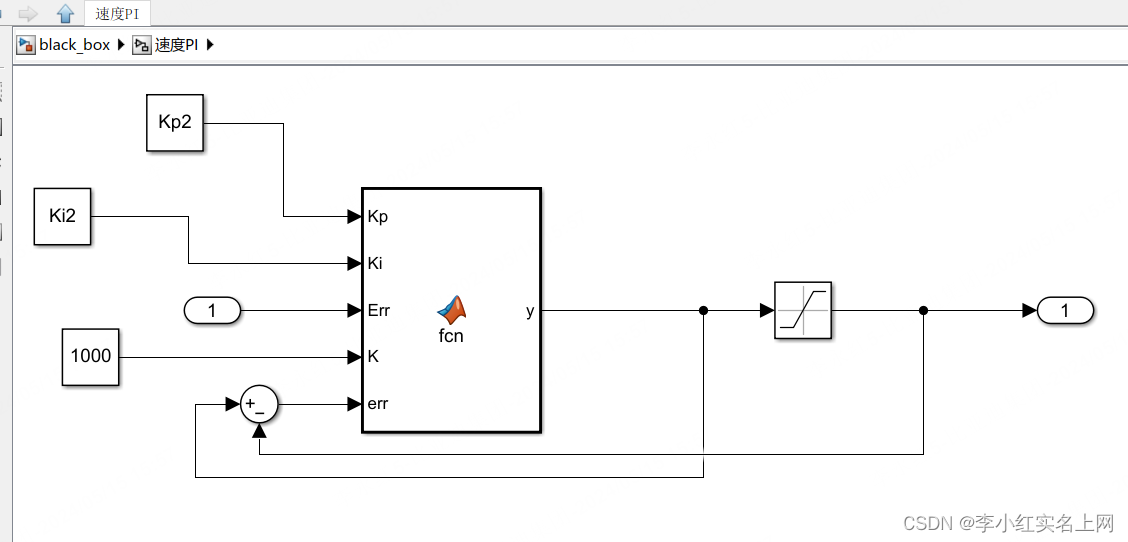
function y = fcn(Kp,Ki,Err,K,err)
Q=K*err;
y =Kp*Err+(Ki-Q)* trapz(Err);
原理就是:PI控制器输出存在限幅(速度PI控制器输出iq,iq不能过大),限幅>实际输出,则积分需要增加增益,使实际输出跟上限制幅值,反之限幅<实际输出,积分增益太大了,会造成超调,应该减小积分增益。
增加之后结果就不存在超调了
电机参数如下:
Udc=200;
Pn=5;
Ts=1e-4;
Ke2=28.60;
Flux2=Ke2*30/1000/Pn/pi;
Rs2=3.435;
Ls2=9.2e-3;
J2=0.00001470;
Kt2=14.324*Ke2;
Te=0.673;%额定电磁转矩
Pe=200;%额定功率
B=2e-5;
Wn=125;
Kp2=Wn*J2*0.86/(1.5*Flux2*Pn);
Ki2=Wn*Kp2/1.7;
Kpwm=1;
Tpwm=250e-6;
Ka=1;
Td=250e-6;
Tm=0.5;















 6096
6096











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









