






1.坐标系建立
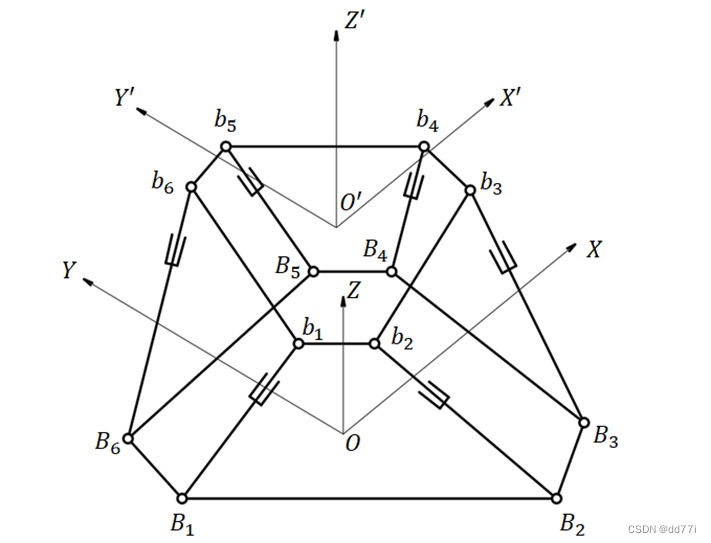
如图1.1所示的结构简图,是Stewart平台的6个下铰接点,
是Stewart平台的6个下铰接点,如图所示建立坐标系。
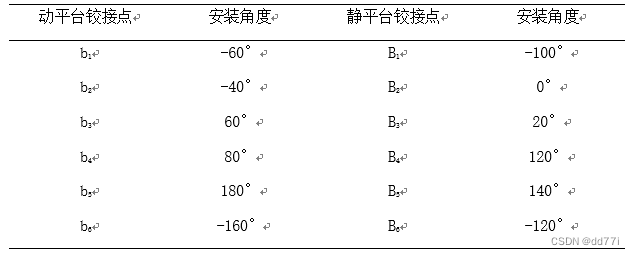
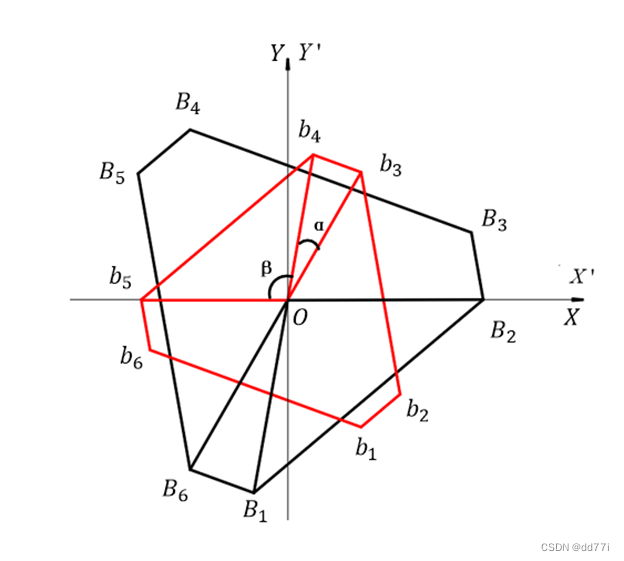
各铰接点的安装角度,在各自坐标系中如图1.2所示,俯视图如图1.3所示。
2.闭环矢量法
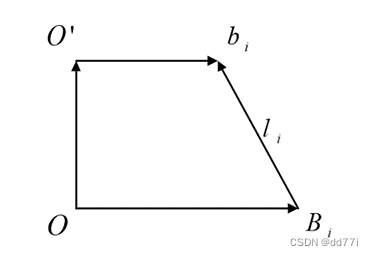
满足以下关系:
![]()
得到6个的值,就是所求运动学逆解。
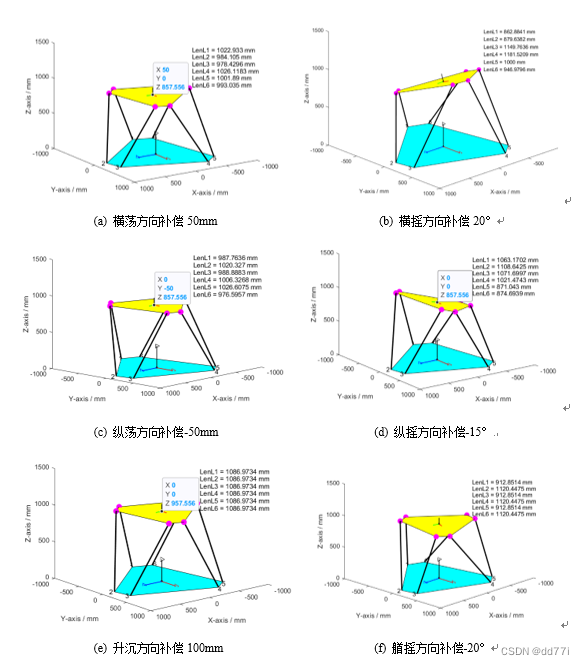
3.MATLAB可视化模型
见附件
如图1.1所示的结构简图,是Stewart平台的6个下铰接点,
是Stewart平台的6个下铰接点,如图所示建立坐标系。
各铰接点的安装角度,在各自坐标系中如图1.2所示,俯视图如图1.3所示。
满足以下关系:
![]()
得到6个的值,就是所求运动学逆解。
见附件

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























 730
730







