






是不是有人在这个pip install -e submodules/depth-diff-gaussian-rasterization和pip install -e submodules/simple-knn这里疯狂报错?
我这里有两个报错的解决方案:
第一种是running cuda的,然后后面是cuda_home=...,这个问题很好解决,意思是你的pytorch版本是cpu版本,这时候可以选择登入Previous PyTorch Versions | PyTorch去选择你需要安装的对应版本,比如根据文章需求的
conda install pytorch==1.13.1 torchvision==0.14.1 torchaudio==0.13.1 pytorch-cuda=11.6 -c pytorch -c nvidia在安装之前最好是pip uninstall把这三个加上torch都给卸了再安装,不然可能会出问题。
cuda安装地址:CUDA Toolkit Archive | NVIDIA Developer
第二个问题是最坑爹的,正当你解决了第一个问题的时候,这时候一片红就出现了,因为没有截图,大概就是几百行的报错,然后里面出现没有指定的类xx的,好,这去看报错人都看晕,而且他妈的没有用!!!为什么,因为该篇作者可能是基于linux的环境写的代码,但本人没用过其他操作系统也不知道会不会有这种问题,反正在window上是不能用的!我是根据后面train的时候需要使用bash来建造colmap,这个bash一直报错自己去搜发现是linux的命令才发觉这个问题的。所以怎么解决呢?很简单,装成cu117版本就行了
conda install pytorch==1.13.1 torchvision==0.14.1 torchaudio==0.13.1 pytorch-cuda=11.7 -c pytorch -c nvidia这时候你就可以pip成功了,浪费了两天时间(哭唧唧)
10.19更新
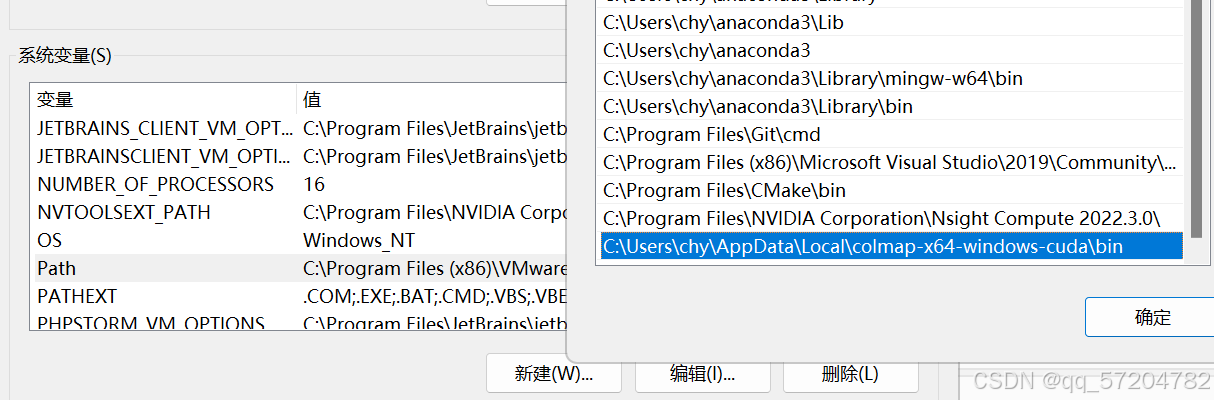
colmap.sh报错的话就是因为你没有吧他放入环境变量中,你应该这样放入环境变量-系统变量-path

















 2271
2271

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









