






 本文探讨了机器人轨迹规划在工业生产中的重要性,介绍了企鹅优化算法在解决轨迹规划问题中的启发式策略。通过定义目标和约束条件,设计适应度函数,Matlab代码展示了如何实现企鹅优化算法以找到最优路径,同时提及了能耗、时间、冲击等多目标综合优化的应用。
本文探讨了机器人轨迹规划在工业生产中的重要性,介绍了企鹅优化算法在解决轨迹规划问题中的启发式策略。通过定义目标和约束条件,设计适应度函数,Matlab代码展示了如何实现企鹅优化算法以找到最优路径,同时提及了能耗、时间、冲击等多目标综合优化的应用。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
目前,机器人轨迹规划问题仍然是人工智能领域的一项重要研究内容,大部分用于工业生产的机器依然为串联的非线性空间连杆机构,该机构在机器人结构和各关节力矩、转角等方面设置了许多限制条件,为了将工业机器人的驱动能力最大程度的发挥出来,从而进行高效能的工作,根据工业机器人轨迹规划的特性,多数情况下需要对速度、加速度和运行时间三方面考虑,而机器人结构、转角以及各关节驱动力矩等这些限制条件使得控制机器人在运动到预先设置的运动点时,要按照已经规划的轨迹进行路径运动[59]。值得注意的是机器人轨迹规划的一般情况下有严格的定位和速度要求,将运动关节的速度和加速度设置为最大,约束其最大值,避免出现超负载状态[60]。
机器人轨迹规划的原理[61]是利用逆运动学将笛卡尔坐标系下的路径坐标点转换成空间坐标系中各个关节节点的角值,运用插值拟合曲线对这些路径坐标点进行拟合,利用程序对这些插值点进行时间规划,通过对这些点的排序以及机器人在各处的运动参数的实时记录,通过实时接收反馈信号的方式进行实时控制。工业机器人轨迹优化根据其优化目标的不同可以分为四种不同形式:
(1)机器人在整个运动过程中能量消耗最小为目的,即能耗最小轨迹优化;
(2)机械臂从初始点到达指定目标点的运动路径最短、相对运动时间最短为目标,即时间最小轨迹优化;
(3)机构在运动中受到的冲击或对速度的影响最小为目标,即冲击最小轨迹优化;
(4)将能耗、时间以及冲击速度等多方面综合考虑,即多目标综合轨迹优化;
基于企鹅优化算法的机器人轨迹规划研究听起来很有趣!企鹅优化算法是一种启发式算法,灵感来源于企鹅群体的行为,尤其是它们在寻找食物和避免天敌时的策略。在机器人轨迹规划方面应用这种算法可以帮助机器人在复杂环境中高效地规划出最优的路径。
首先,你可能需要定义问题的具体目标和约束条件,比如机器人需要通过哪些点,需要避开哪些障碍物,以及规划路径的时间限制等等。然后,你可以设计一个适合于企鹅优化算法的适应度函数,用于评估每条路径的优劣程度。
在实施过程中,你可以模拟企鹅群体在搜索食物时的行为,将机器人看作一个个体,不断尝试不同的路径,并根据适应度函数评估其质量。随着时间的推移,通过迭代和交流,机器人可以逐渐找到一条最优的路径。
当然,在实际应用中还有很多细节需要考虑,比如算法的收敛性、局部最优解的处理、以及如何将算法与实际机器人系统进行集成等等。但是通过结合企鹅优化算法的特点,你可以期望得到一种有效的轨迹规划方法,能够应对各种复杂的环境和任务需求。
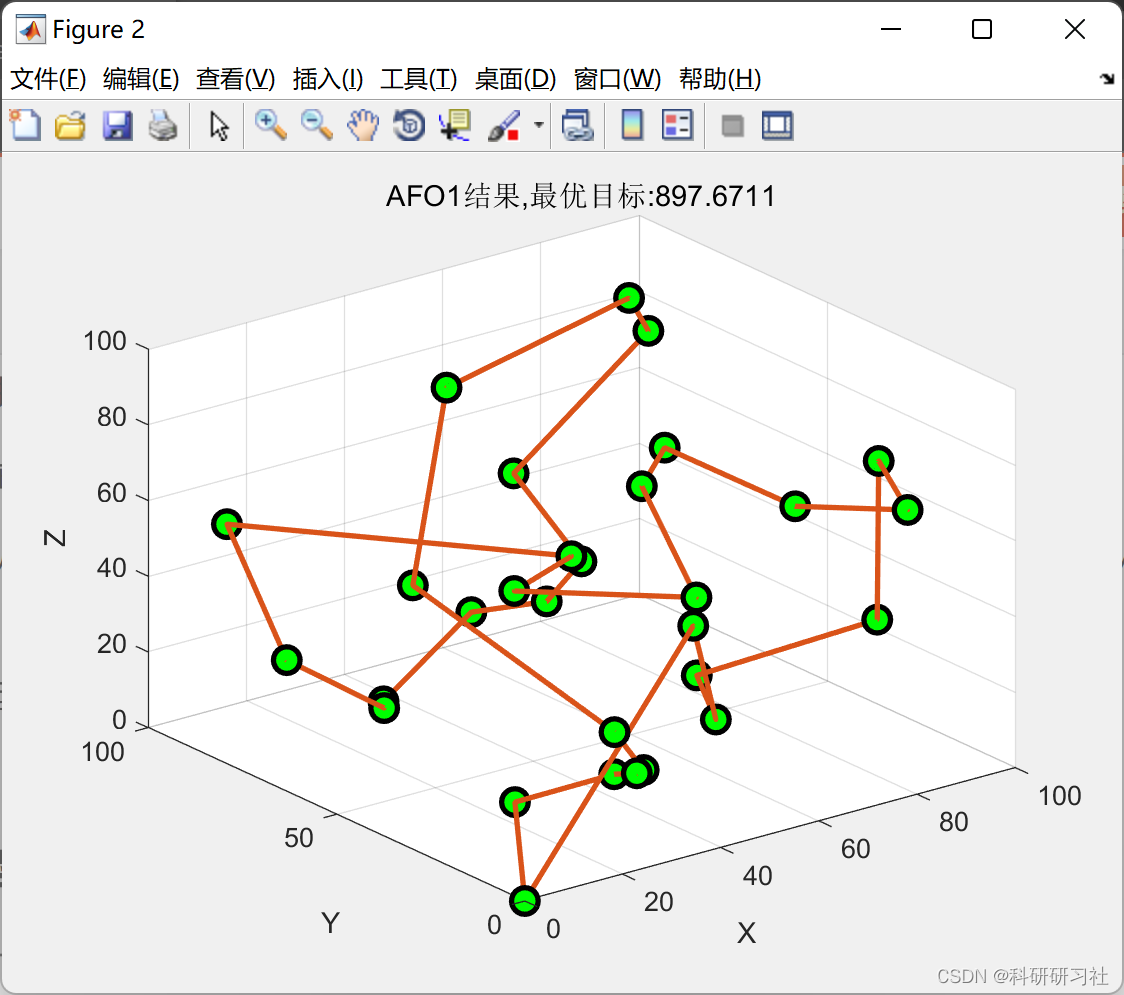
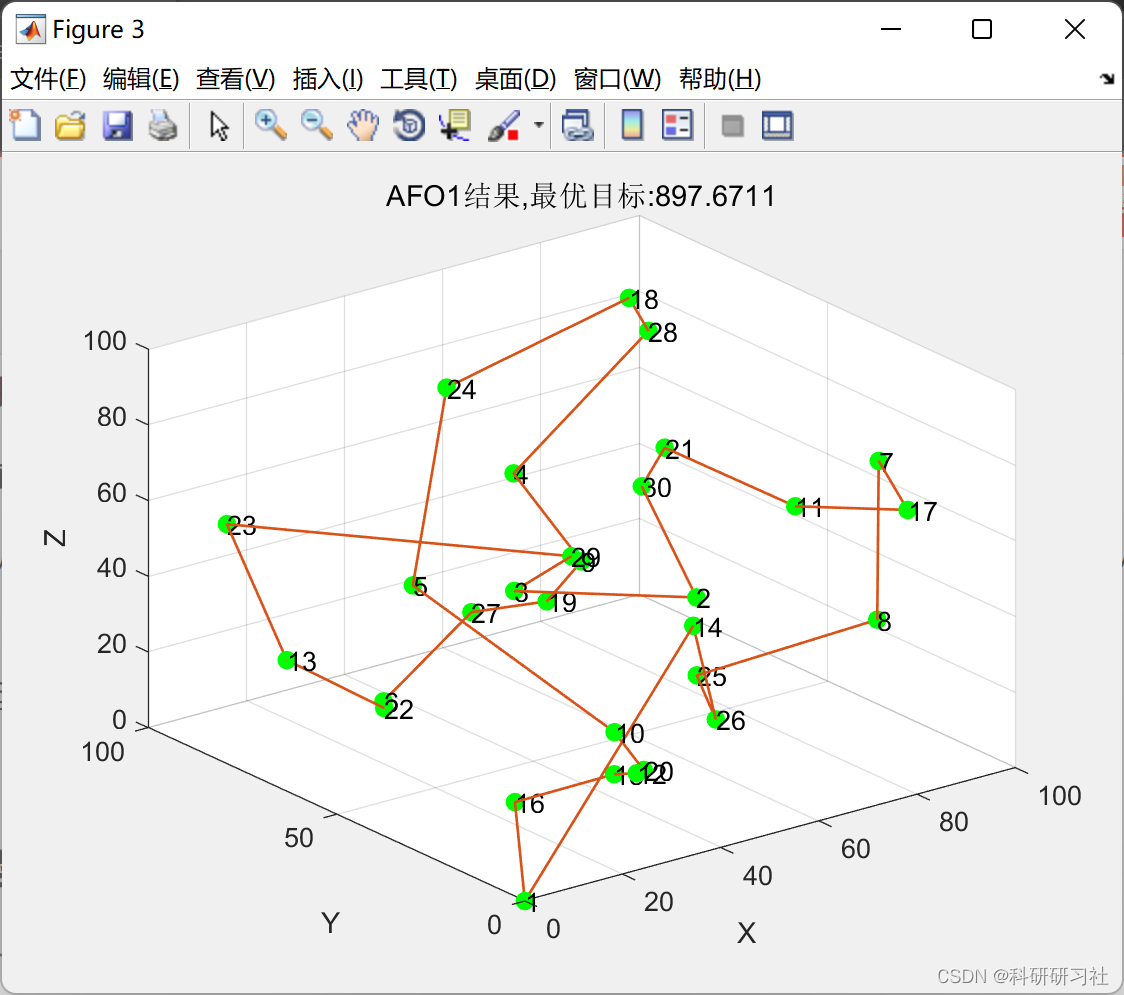
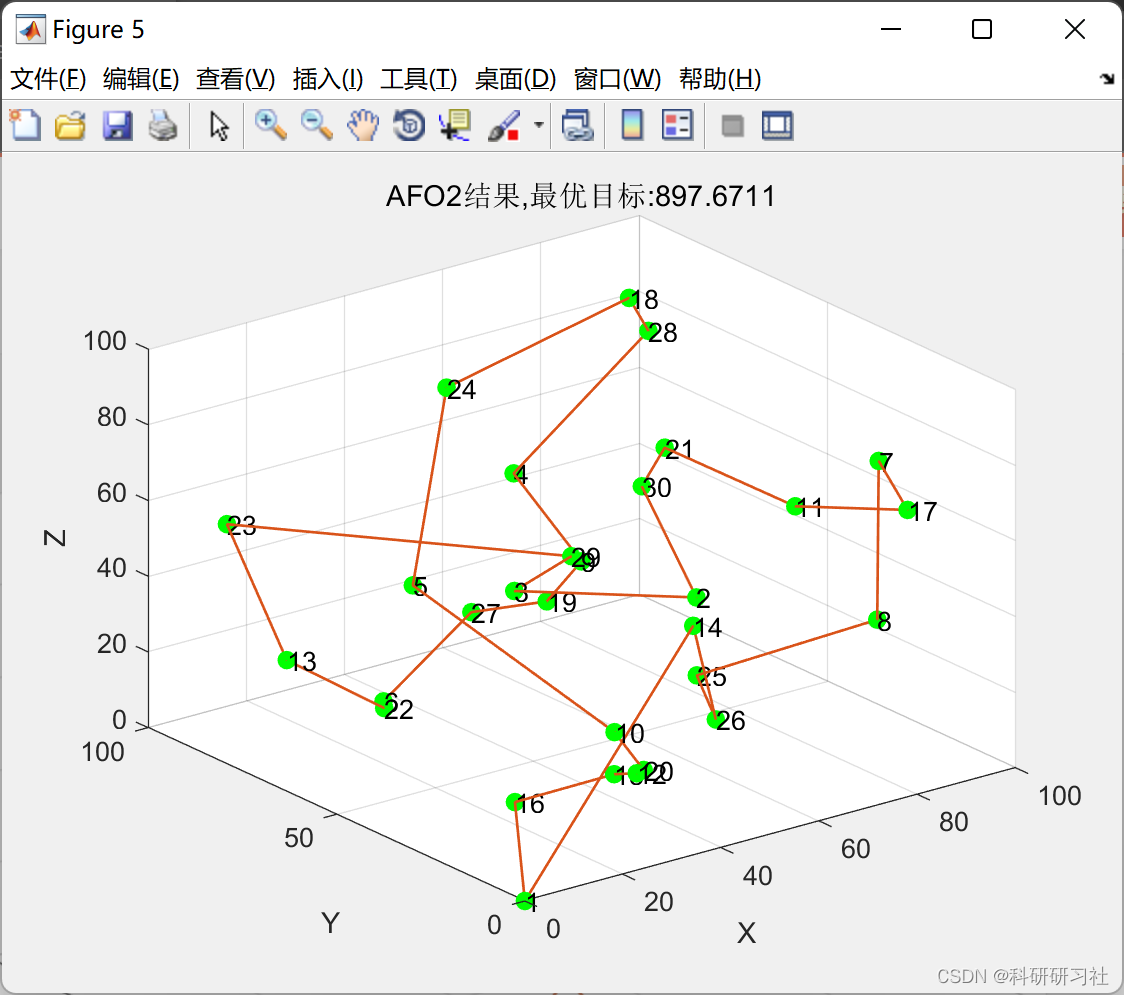
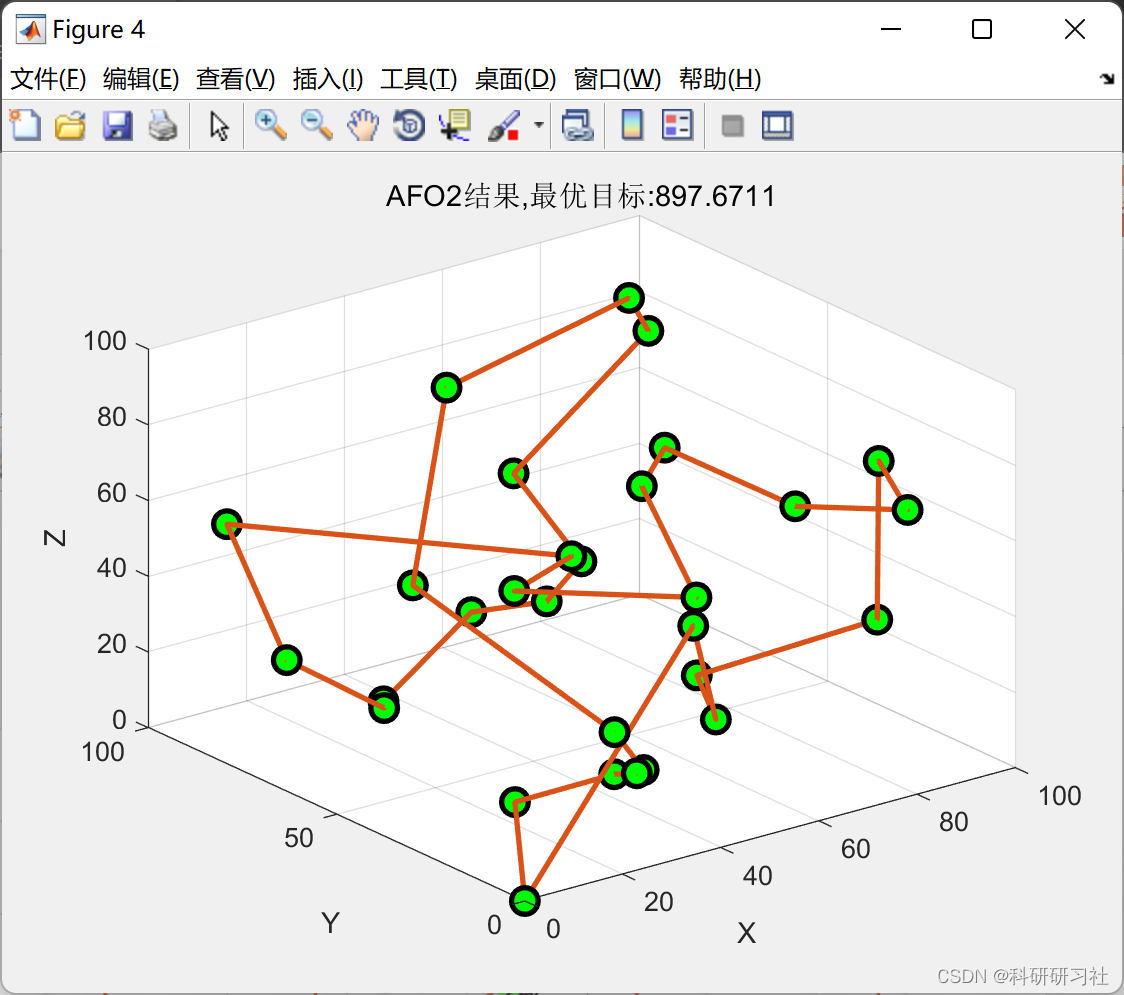
📚2 运行结果
部分代码:
function drawPc(result1,option,data,str)
figure
plot3(data.node(:,1),data.node(:,2),data.node(:,3),'o','LineWidth',2,...
'MarkerEdgeColor','k',...
'MarkerFaceColor','g',...
'MarkerSize',10)
hold on
plot3(data.node(result1.path,1),data.node(result1.path,2),data.node(result1.path,3),'-','LineWidth',2,...
'MarkerEdgeColor','k',...
'MarkerFaceColor','g',...
'MarkerSize',10)
xlabel('X')
ylabel('Y')
zlabel('Z')
grid on
title([str,'结果,最优目标:',num2str(result1.fit)])
figure
plot3(data.node(:,1),data.node(:,2),data.node(:,3),'o','LineWidth',2,...
'MarkerEdgeColor','g',...
'MarkerFaceColor','g',...
'MarkerSize',5)
hold on
plot3(data.node(result1.path,1),data.node(result1.path,2),data.node(result1.path,3),'-','LineWidth',1,...
'MarkerEdgeColor','g',...
'MarkerFaceColor','g',...
'MarkerSize',5)
for i=1:length(data.node(:,1))
text(data.node(i,1),data.node(i,2),data.node(i,3),num2str(i))
end
xlabel('X')
ylabel('Y')
zlabel('Z')
grid on
title([str,'结果,最优目标:',num2str(result1.fit)])
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]吕金隆,王克帅.基于改进蚁群算法包装机器人轨迹规划分析[J].中国新技术新产品,2021(24):23-25.DOI:10.13612/j.cnki.cntp.2021.24.009.
[2]汤彬.基于智能优化算法的双机器人轨迹规划[D].华东理工大学[2024-04-21].
[3]张文翔,董宏林.基于粒子群优化算法的机器人最优轨迹规划[J].机床与液压, 2020, 48(12):5.DOI:10.3969/j.issn.1001-3881.2020.12.024.
[4]石炜,林家祥,郭彤.基于教学优化算法的六轴工业机器人轨迹规划[J].装备制造技术, 2022(006):000.















 3993
3993











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









