






 文章探讨了机器人技术中的关键概念,包括构建多维状态空间进行路径规划,使用RRT算法,逆向运动学和关节角度控制。物理建模在机器人开发和控制策略验证中起到重要作用,同时介绍了系统辨识在提高控制精度和应对非线性因素中的应用。文章以四旋翼飞行器为例,并提到了MATLAB在系统辨识和控制器自动调优中的应用。
文章探讨了机器人技术中的关键概念,包括构建多维状态空间进行路径规划,使用RRT算法,逆向运动学和关节角度控制。物理建模在机器人开发和控制策略验证中起到重要作用,同时介绍了系统辨识在提高控制精度和应对非线性因素中的应用。文章以四旋翼飞行器为例,并提到了MATLAB在系统辨识和控制器自动调优中的应用。
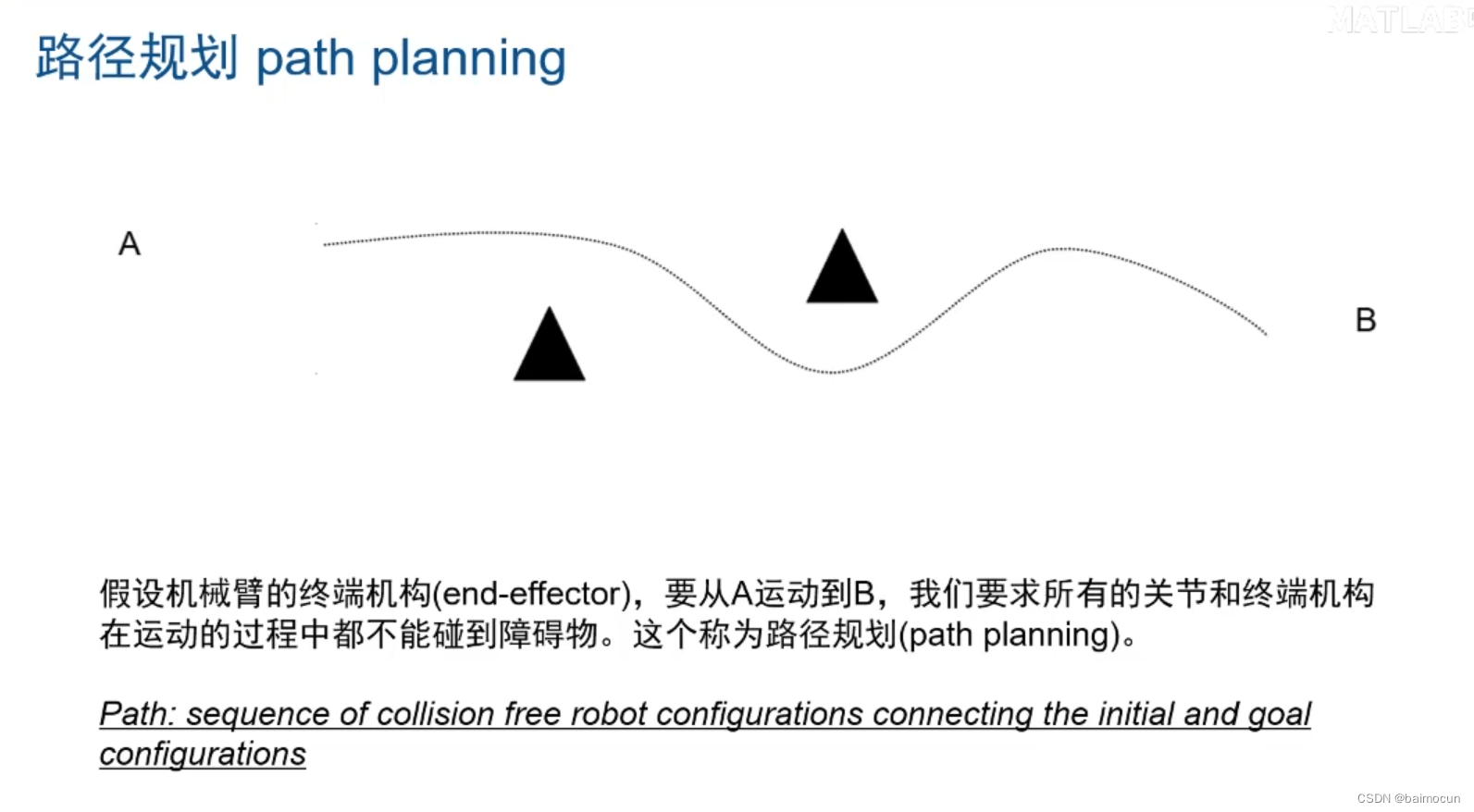
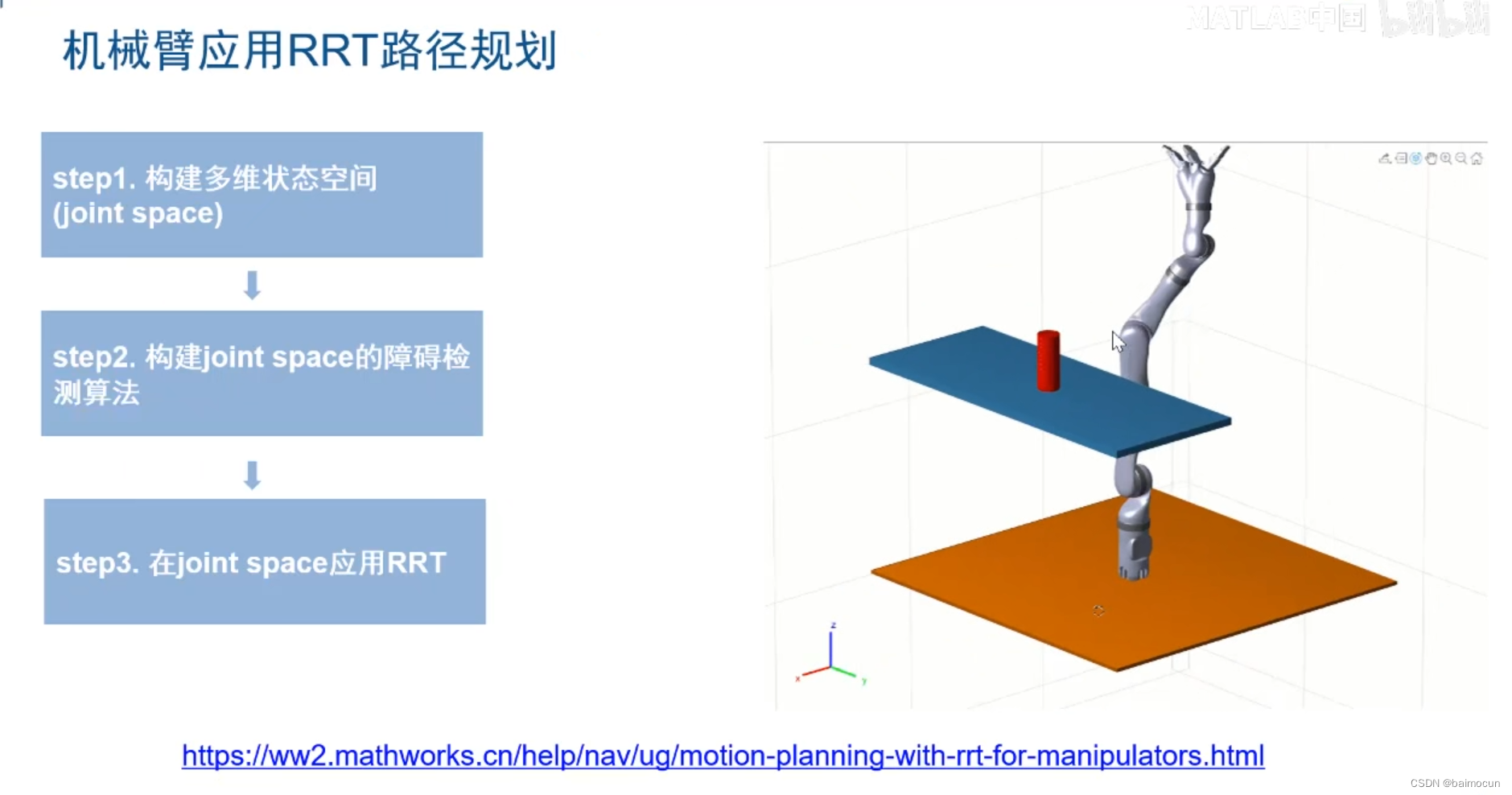
1、构建机器人的多维状态空间(七轴机器人则为七维)
2、把障碍物从三维坐标map到七维空间中去
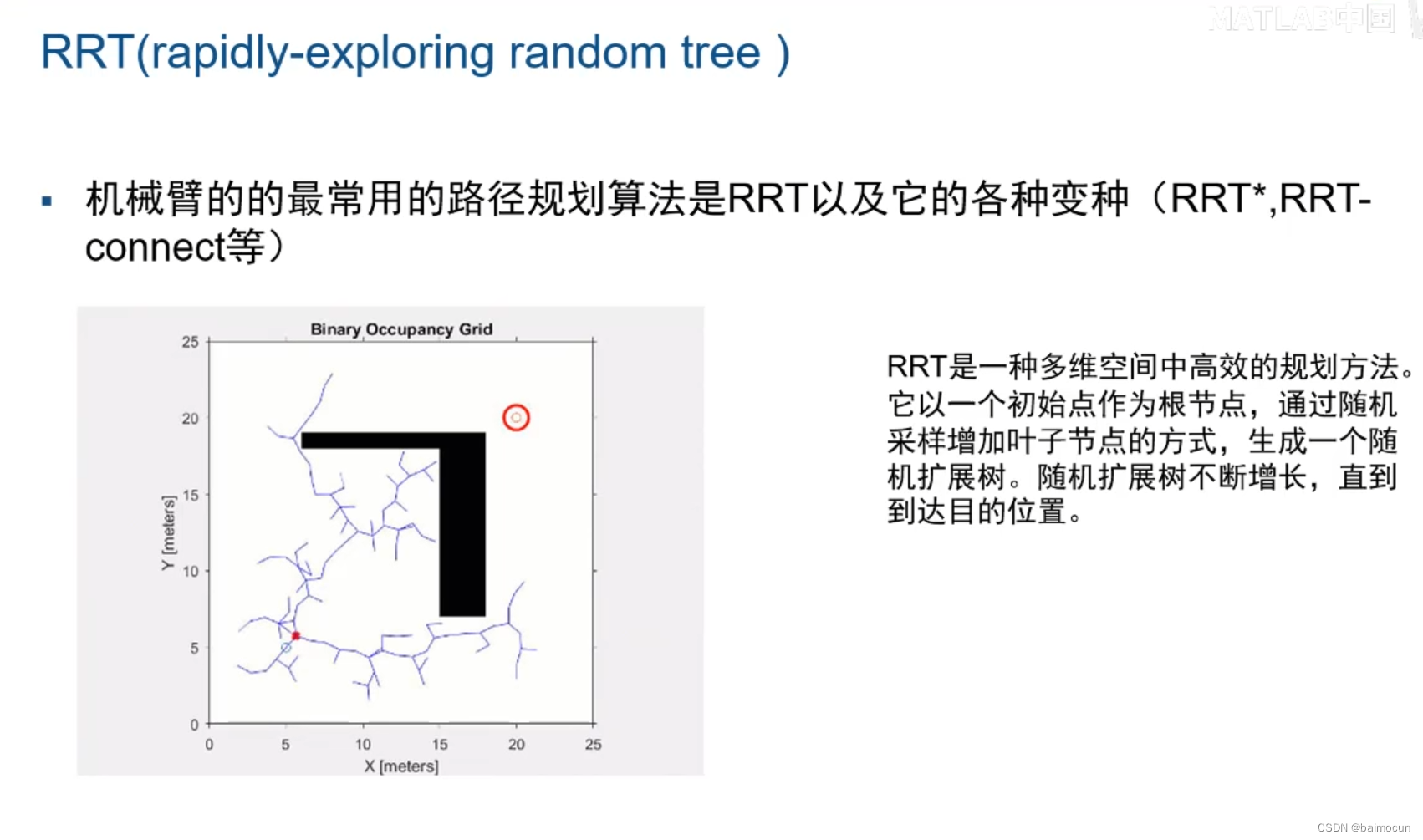
3、在七维空间中应用RRT进行路径规划
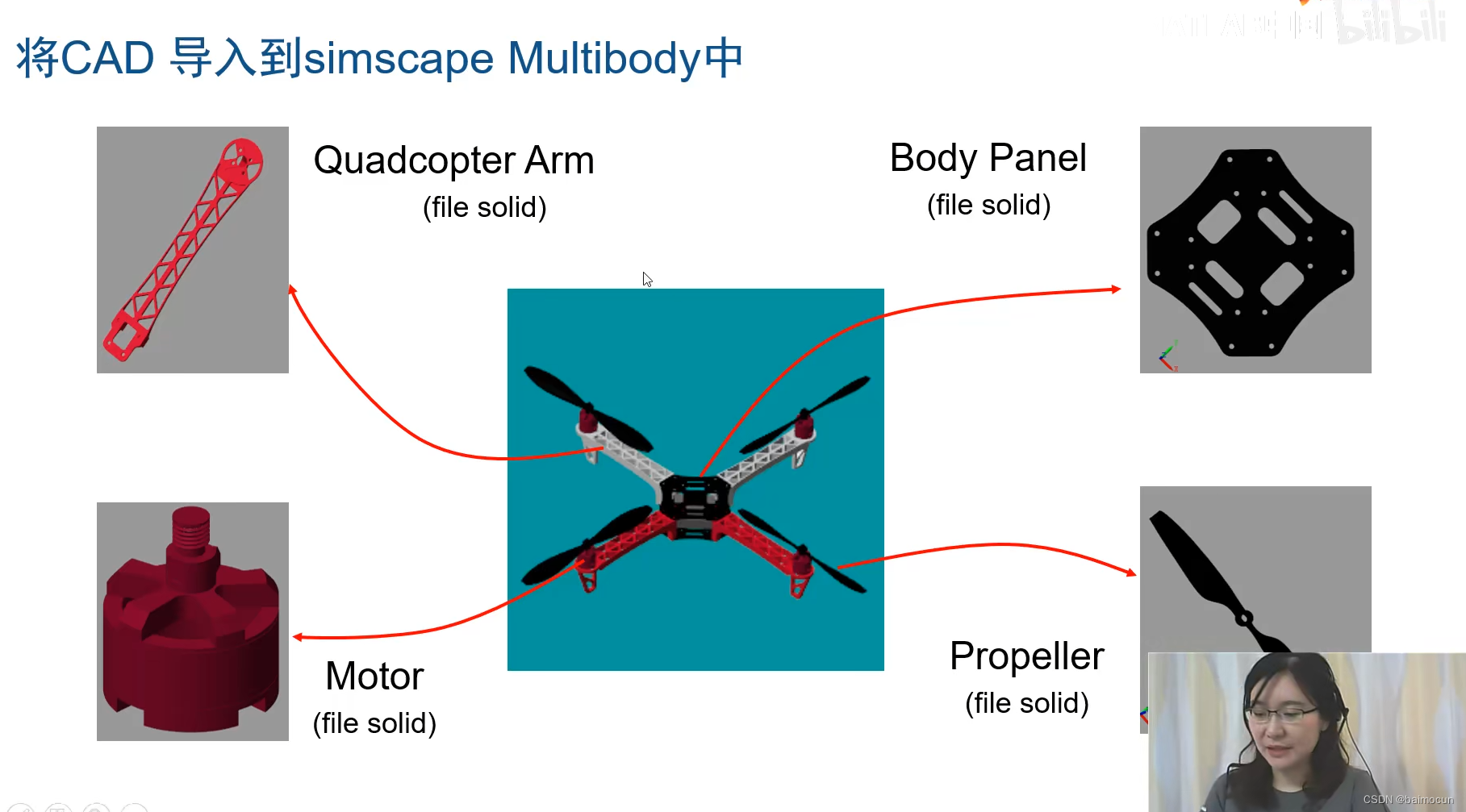
rrdf是一个常见的描述机械臂结构的CAD文件
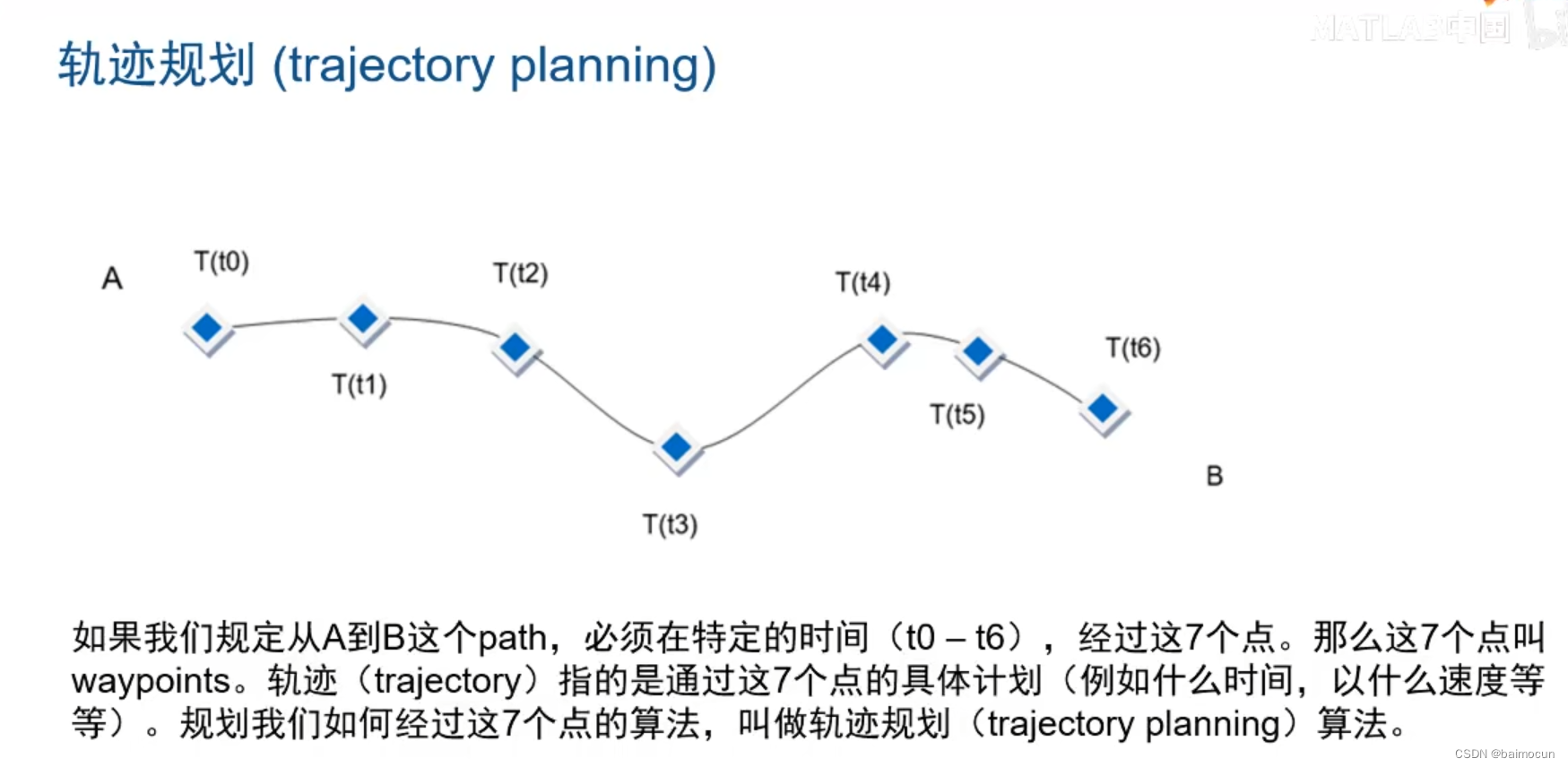
下面分别分别为梯形规划和五次多项式规划示意图
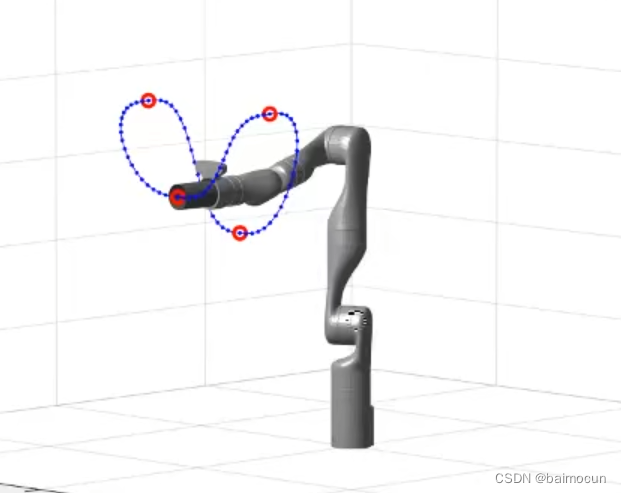
五次多项式满足 位置连续、速度连续、加速度连续。
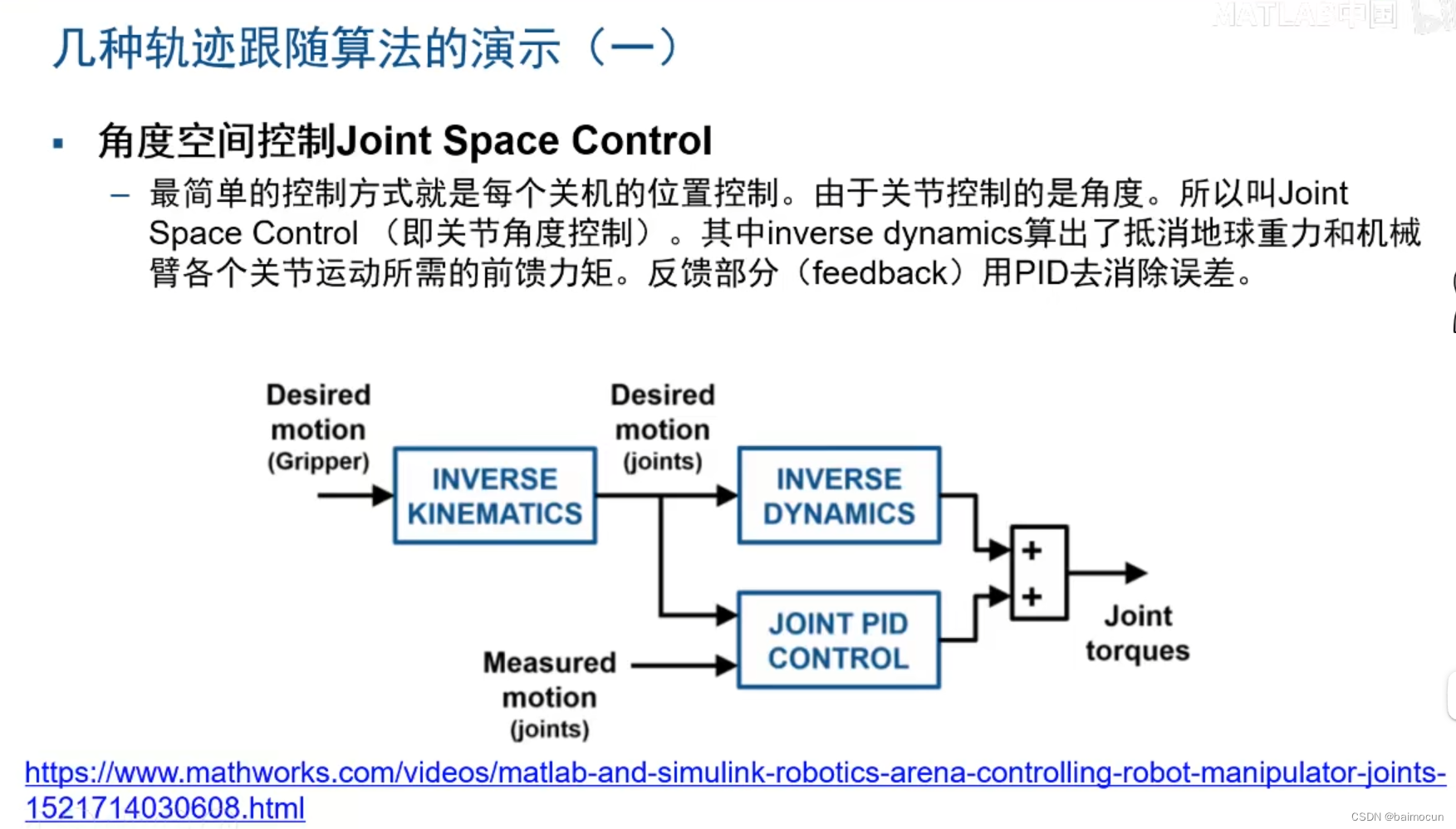
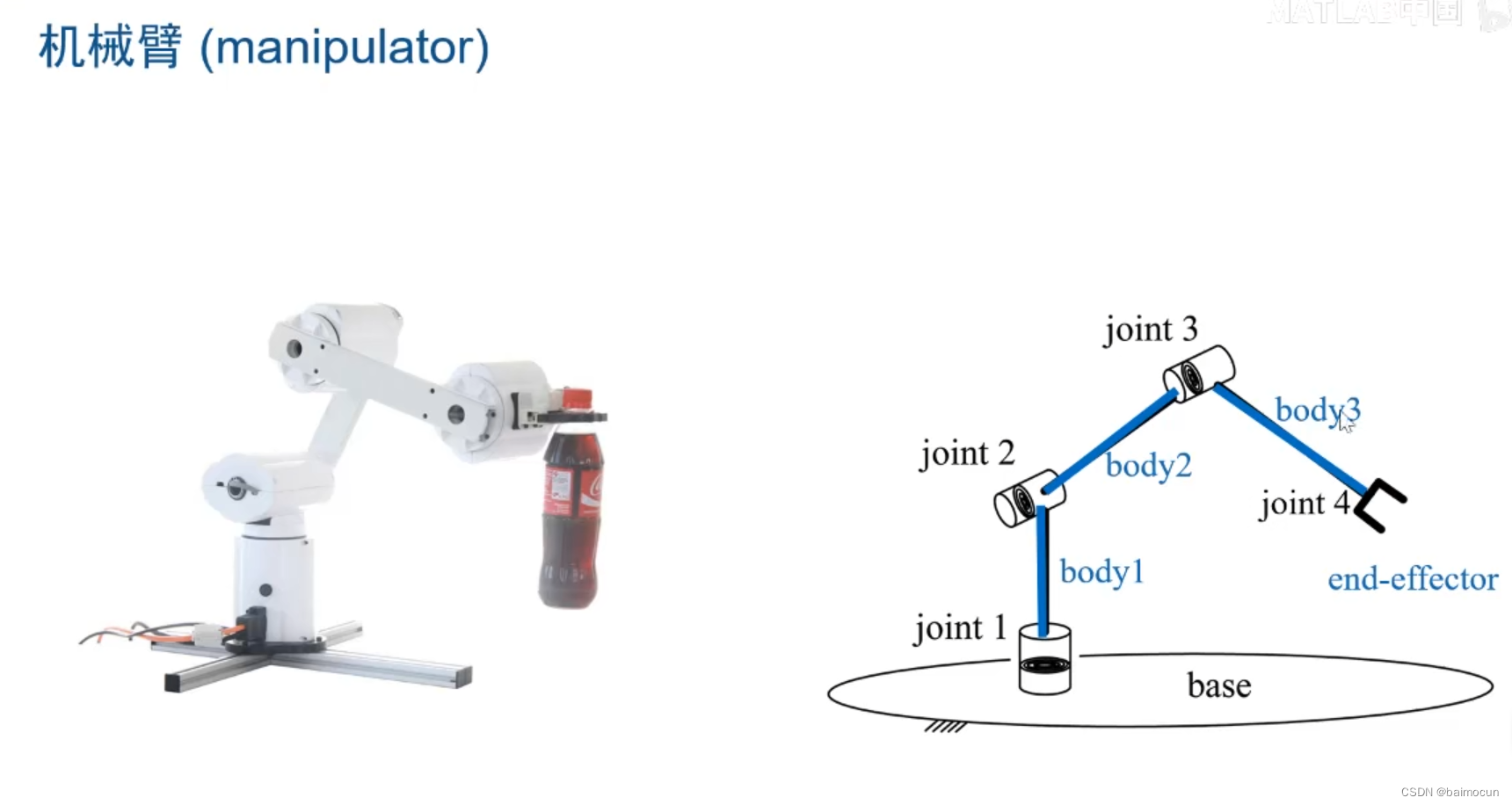
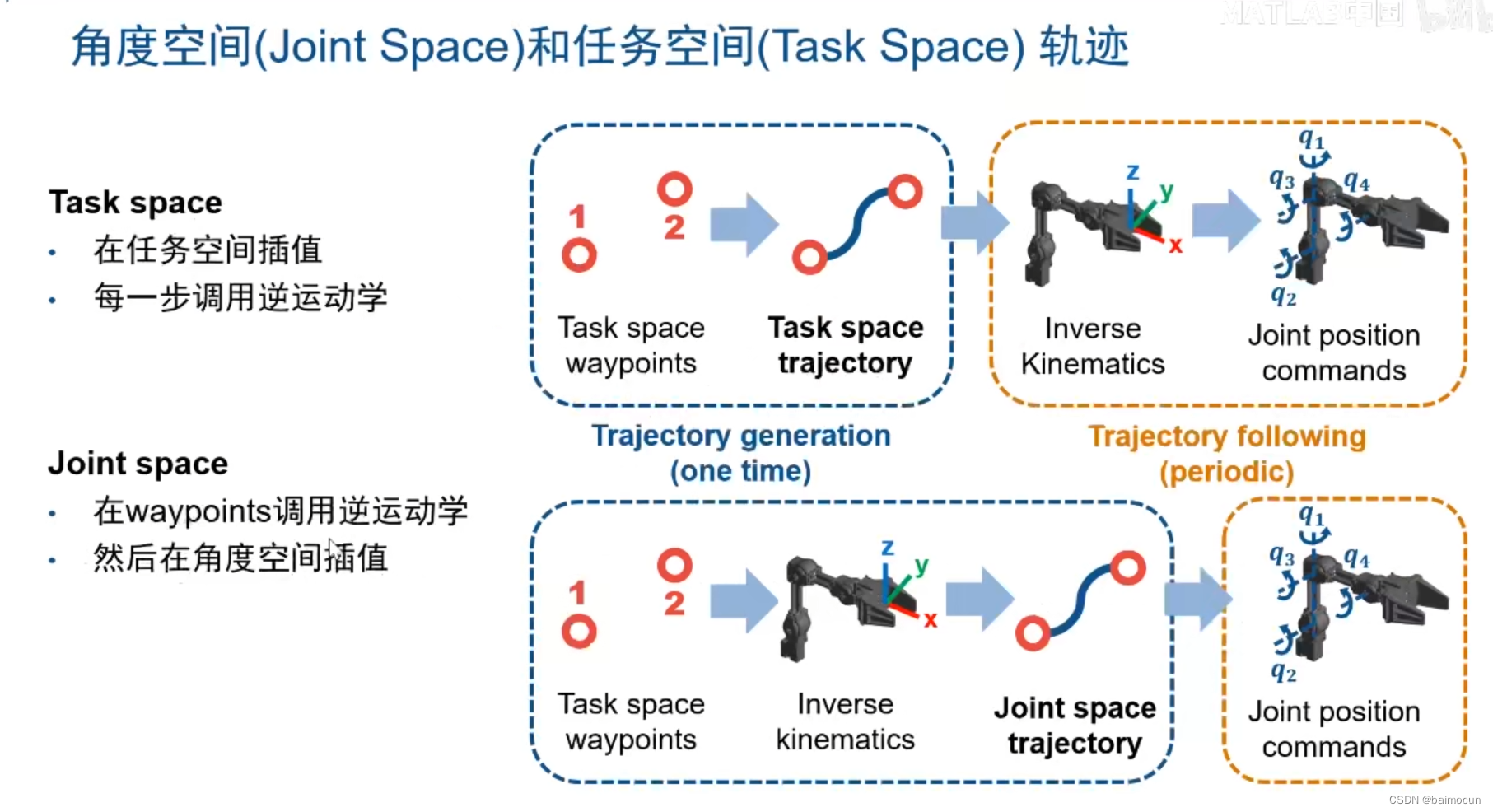
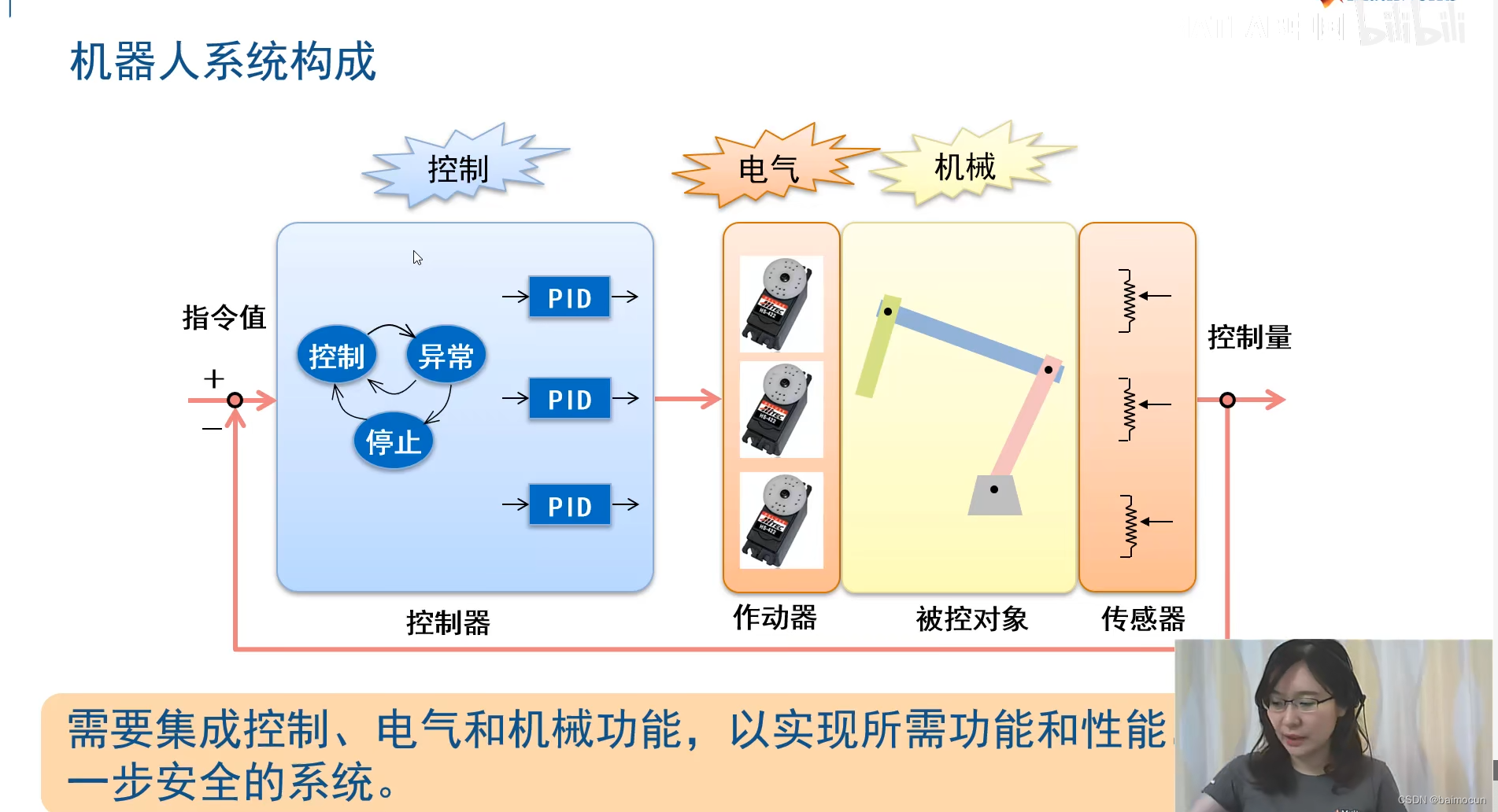
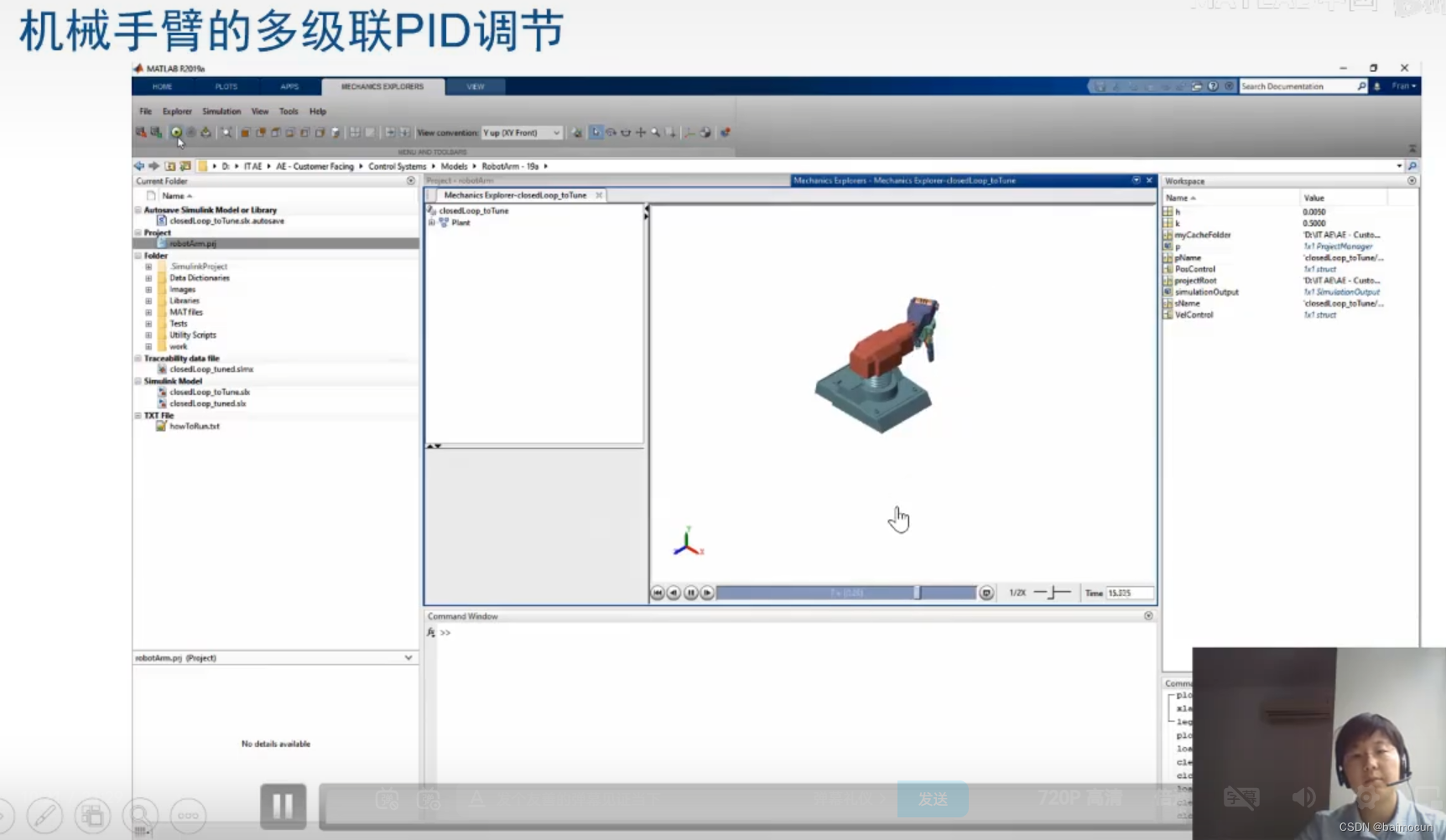
在这个例子中,首先,inverse kinematics(逆向运动学)根据end-effector(末端执行器)的位置,计算出各个关节(电机)所需的角度位置,然后交给各个关节的电机去执行。由于关节控制的是角度,所以叫Joint space control(关节角度控制)。其中inverse dynamics(逆向动力学)算出了抵消地球重力所需的反馈力矩。反馈部分(feedback)用PID消除误差。
图中:gripper(夹具)、joint(关节)、joint torques(关节力矩)

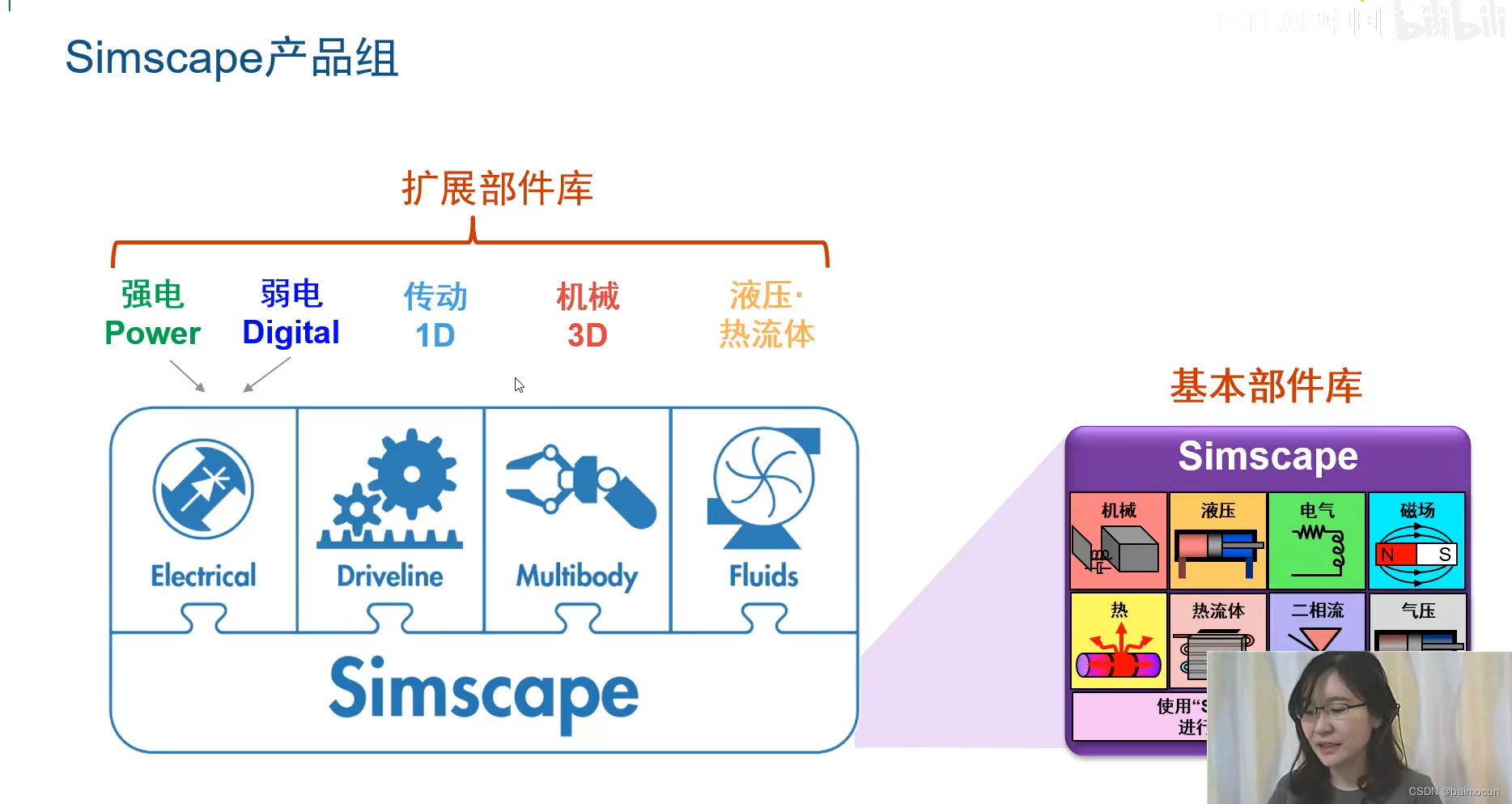
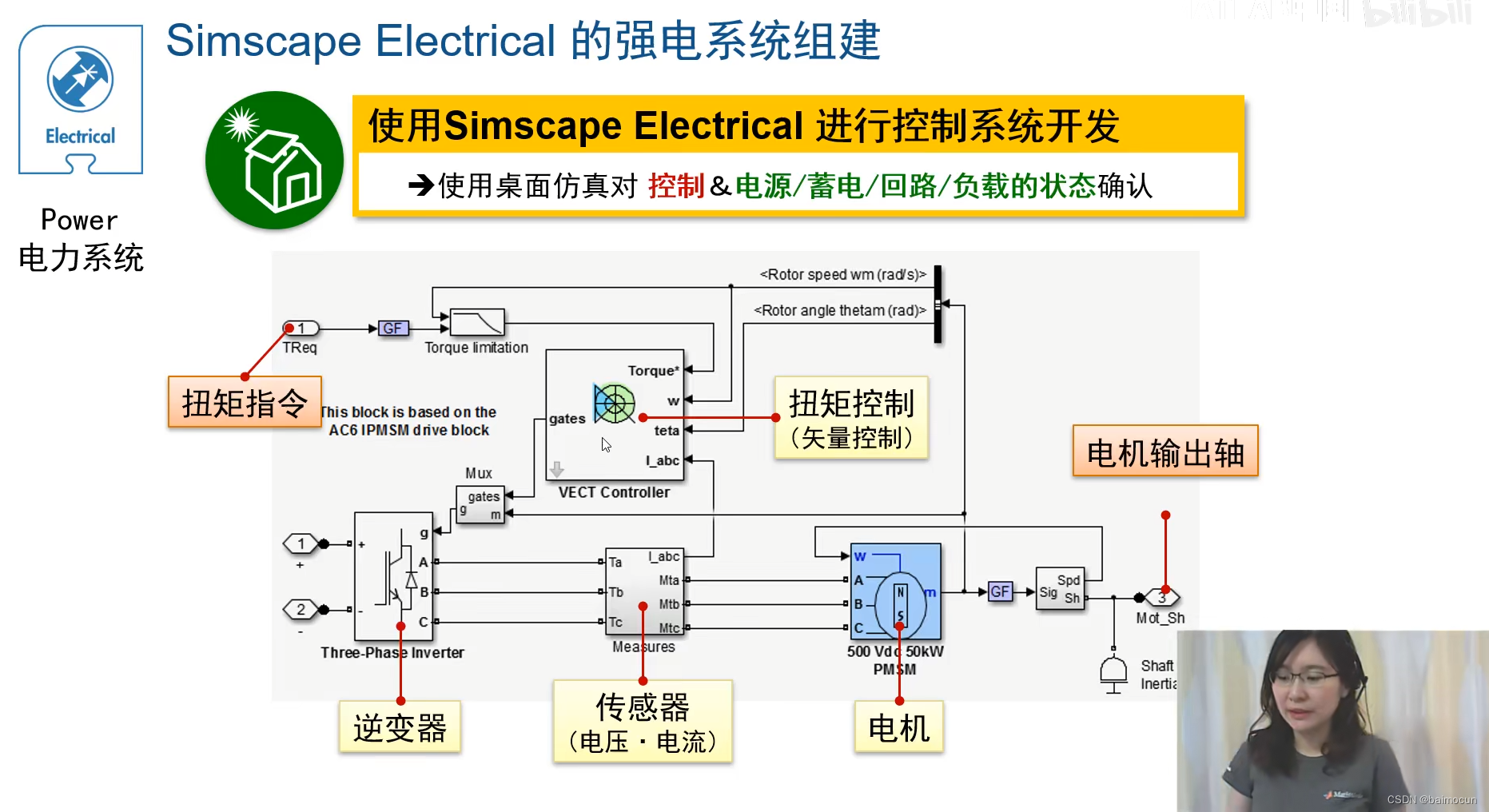
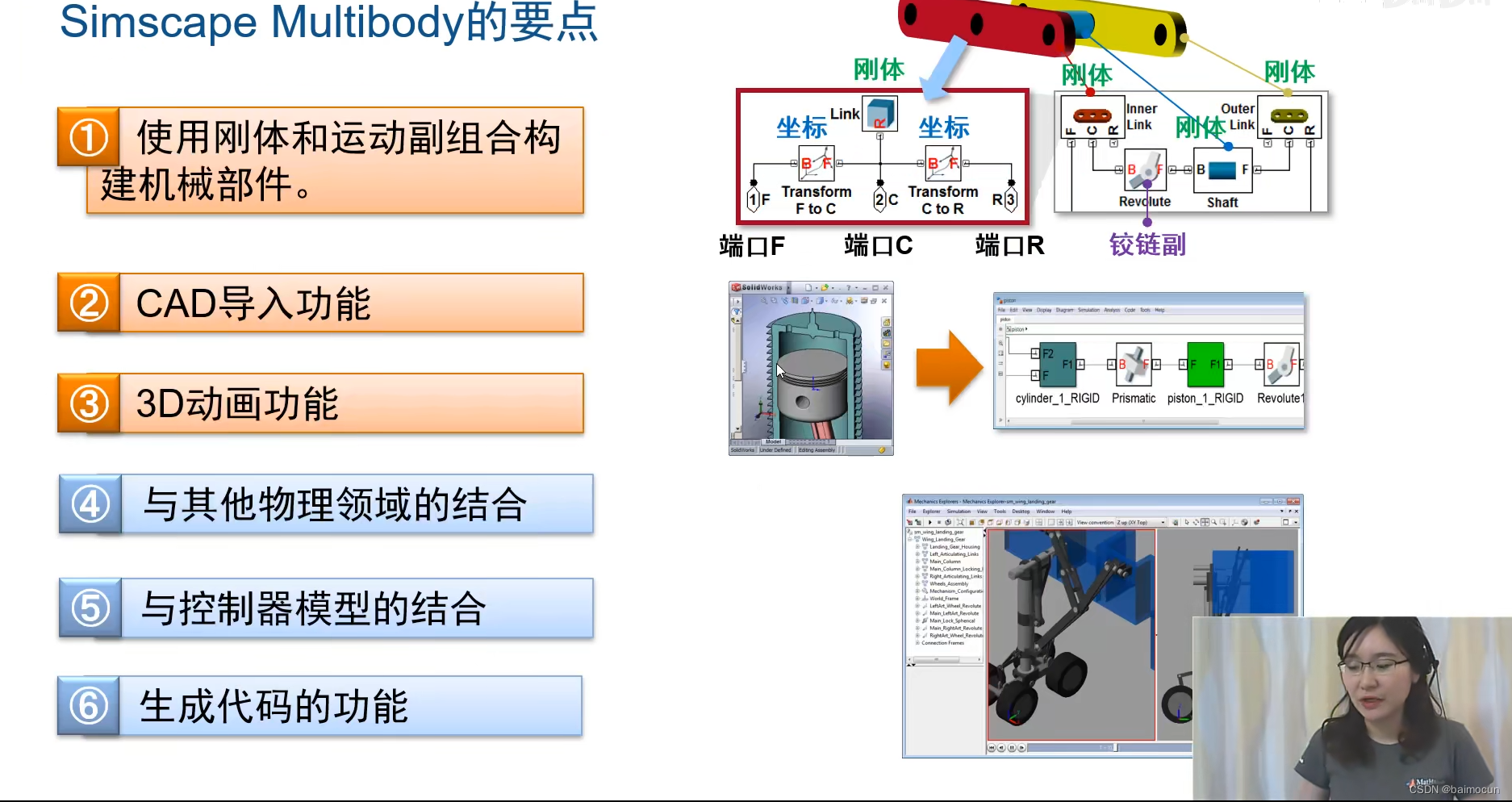
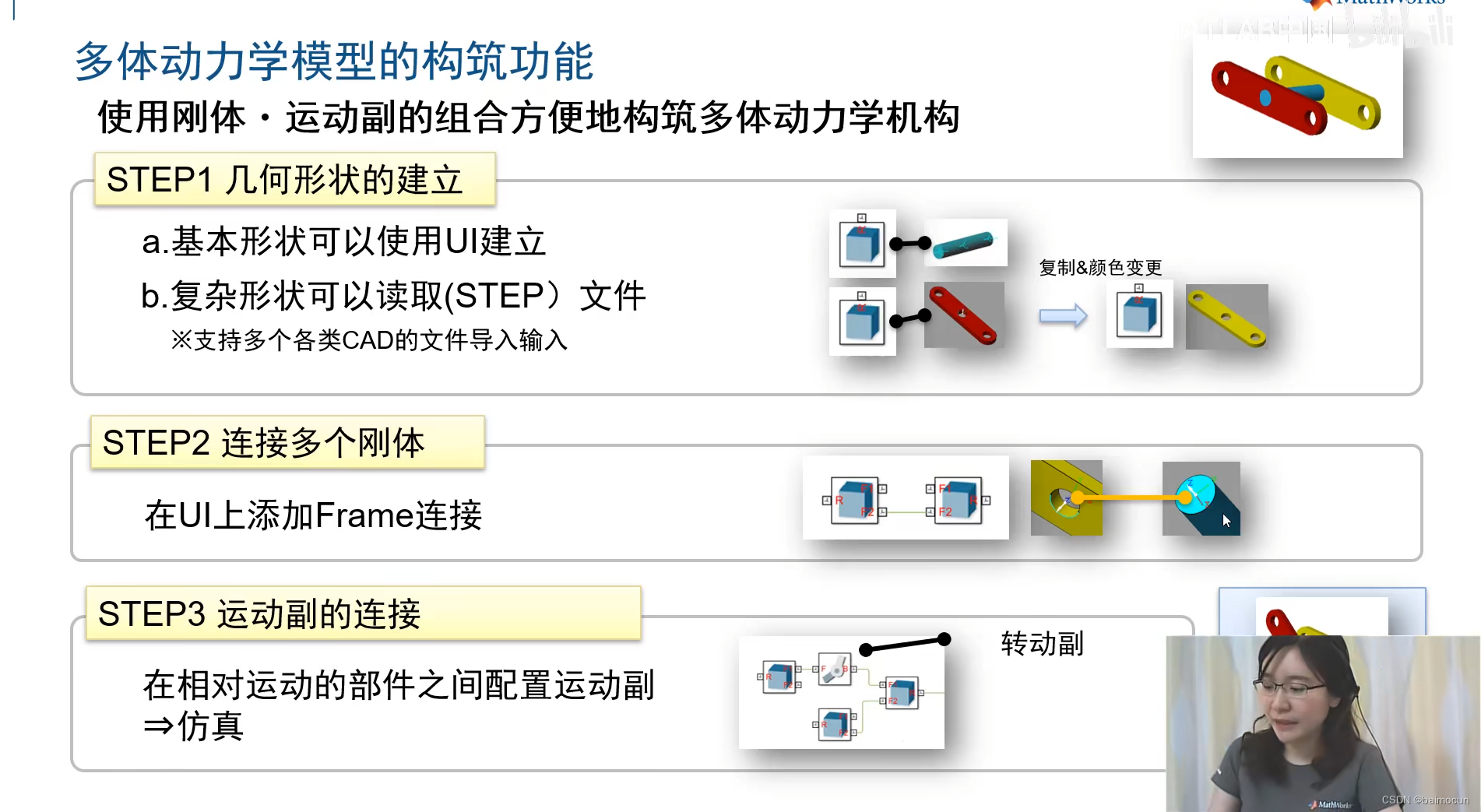
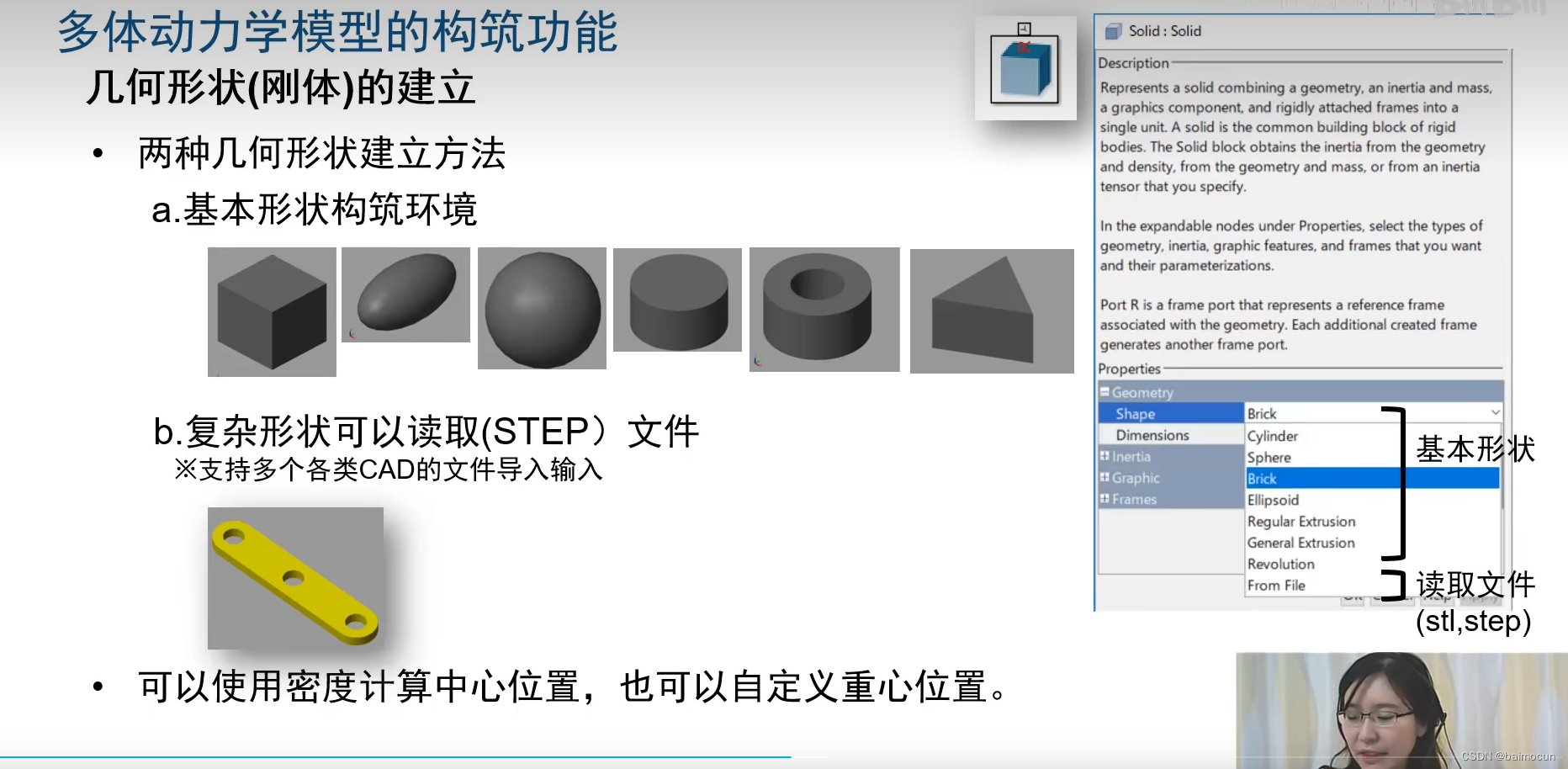
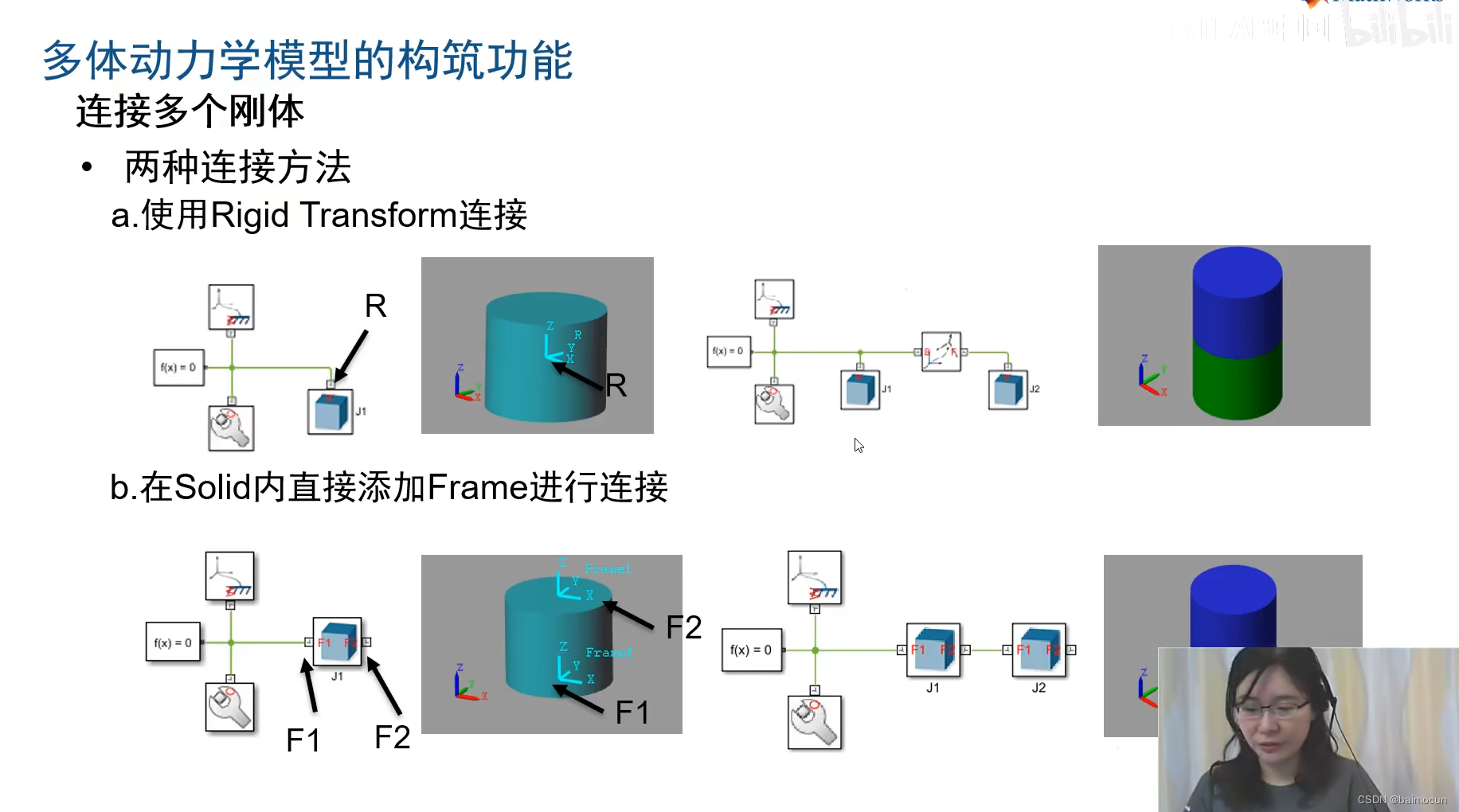
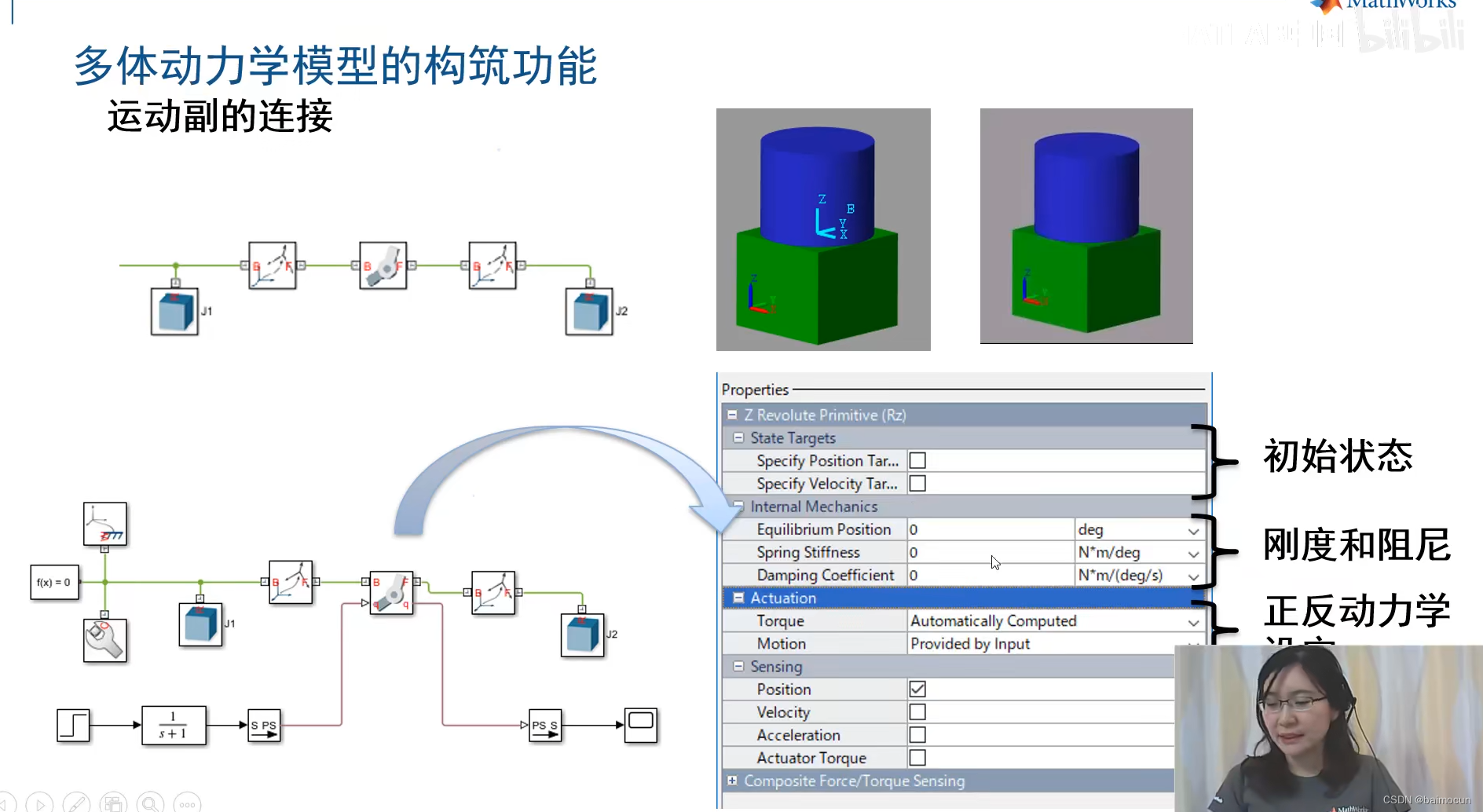
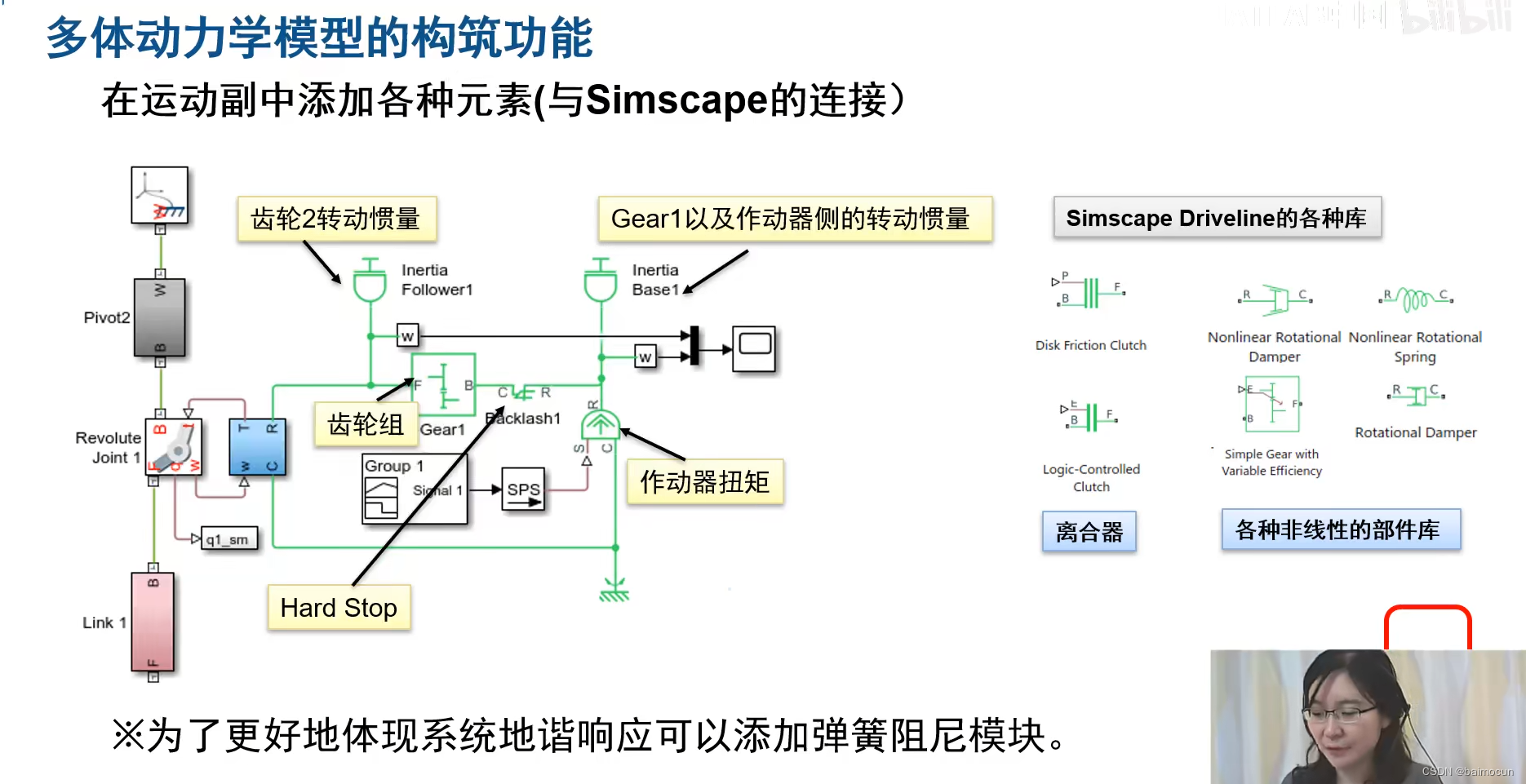
物理建模在开发过程中的应用
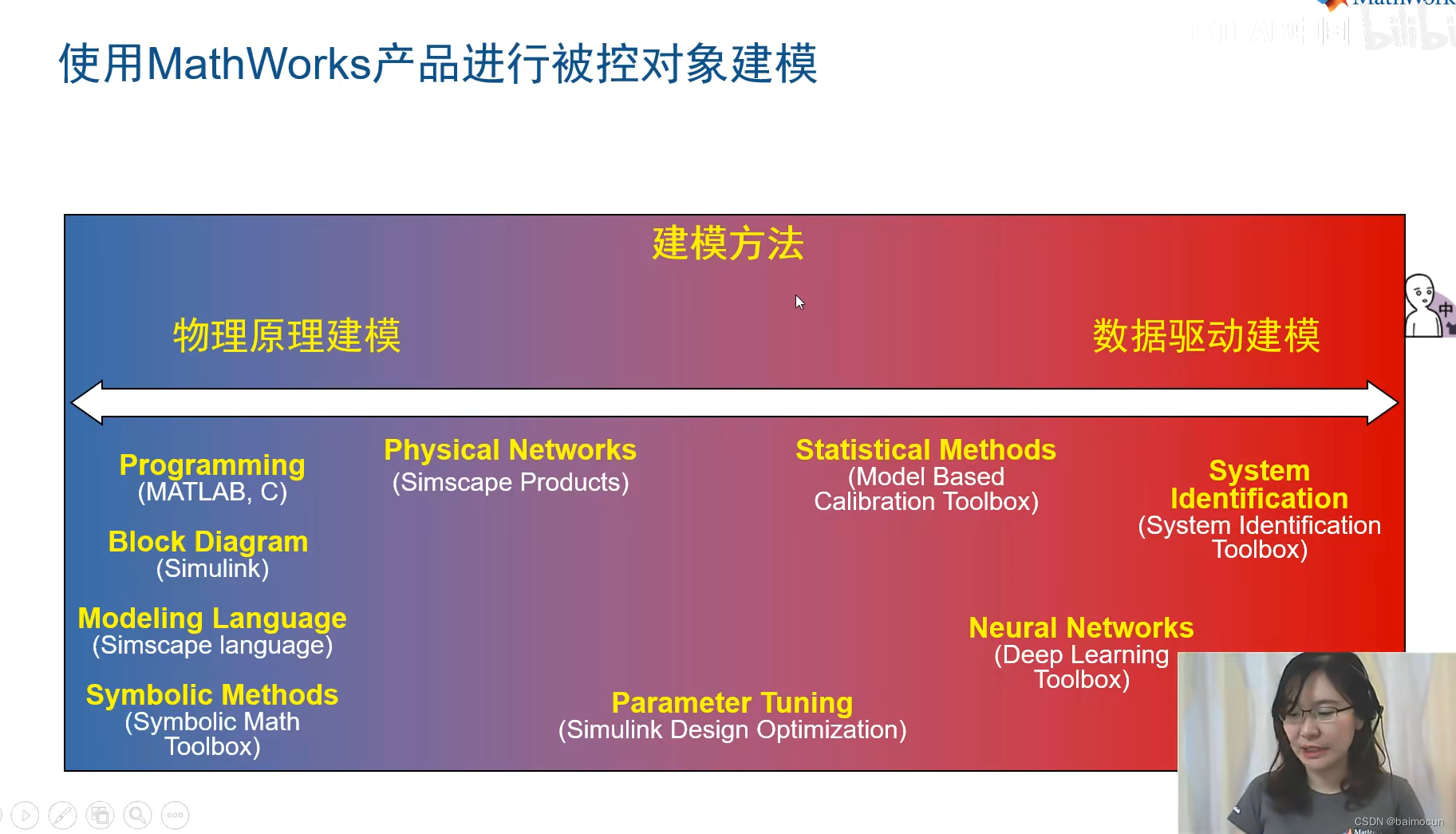
物理原理建模:根据建模对象的物理方程式,建立微分方程建模。
数据驱动建模:不了解物理模型,求解数理方程难度较大。
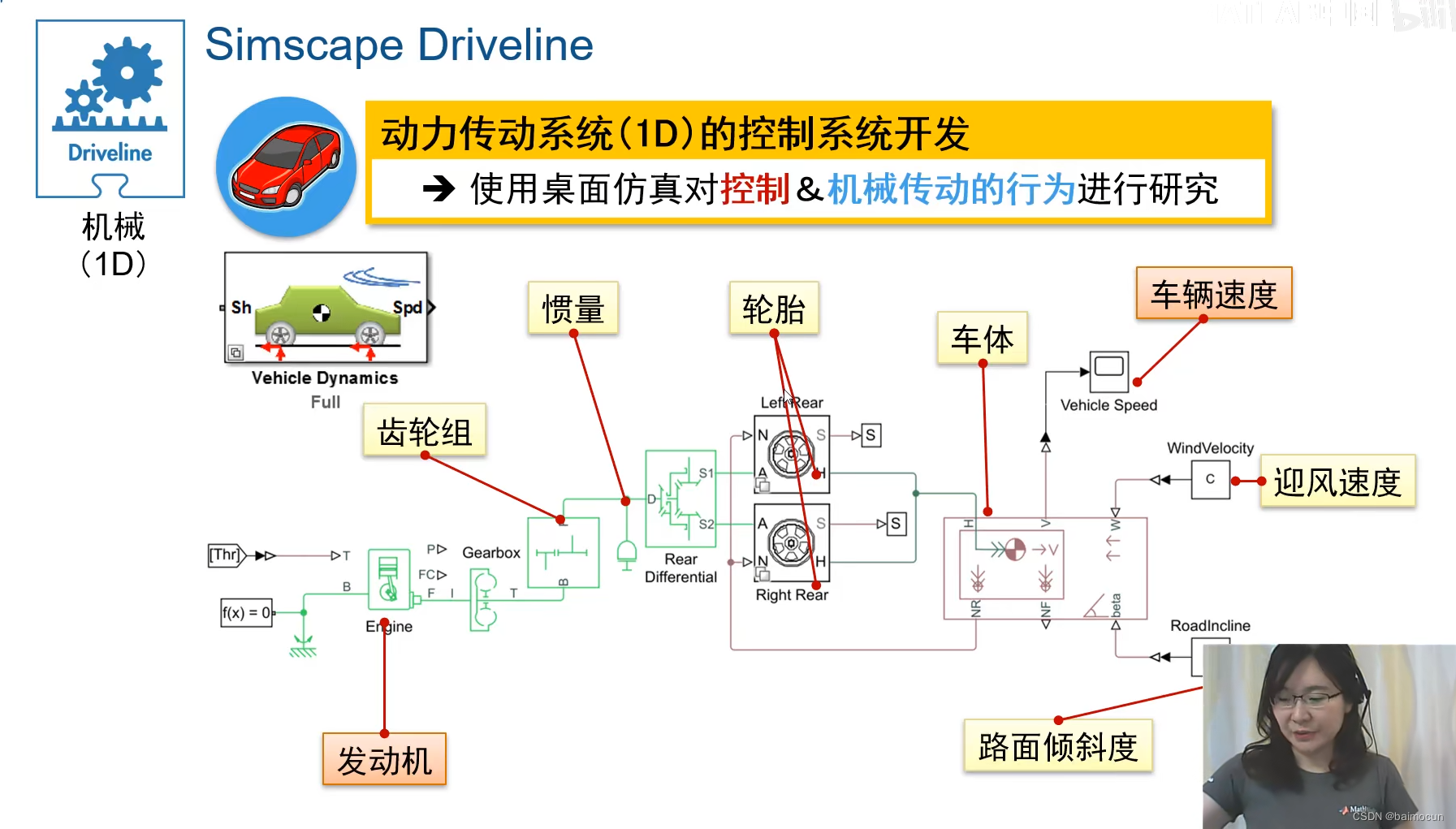
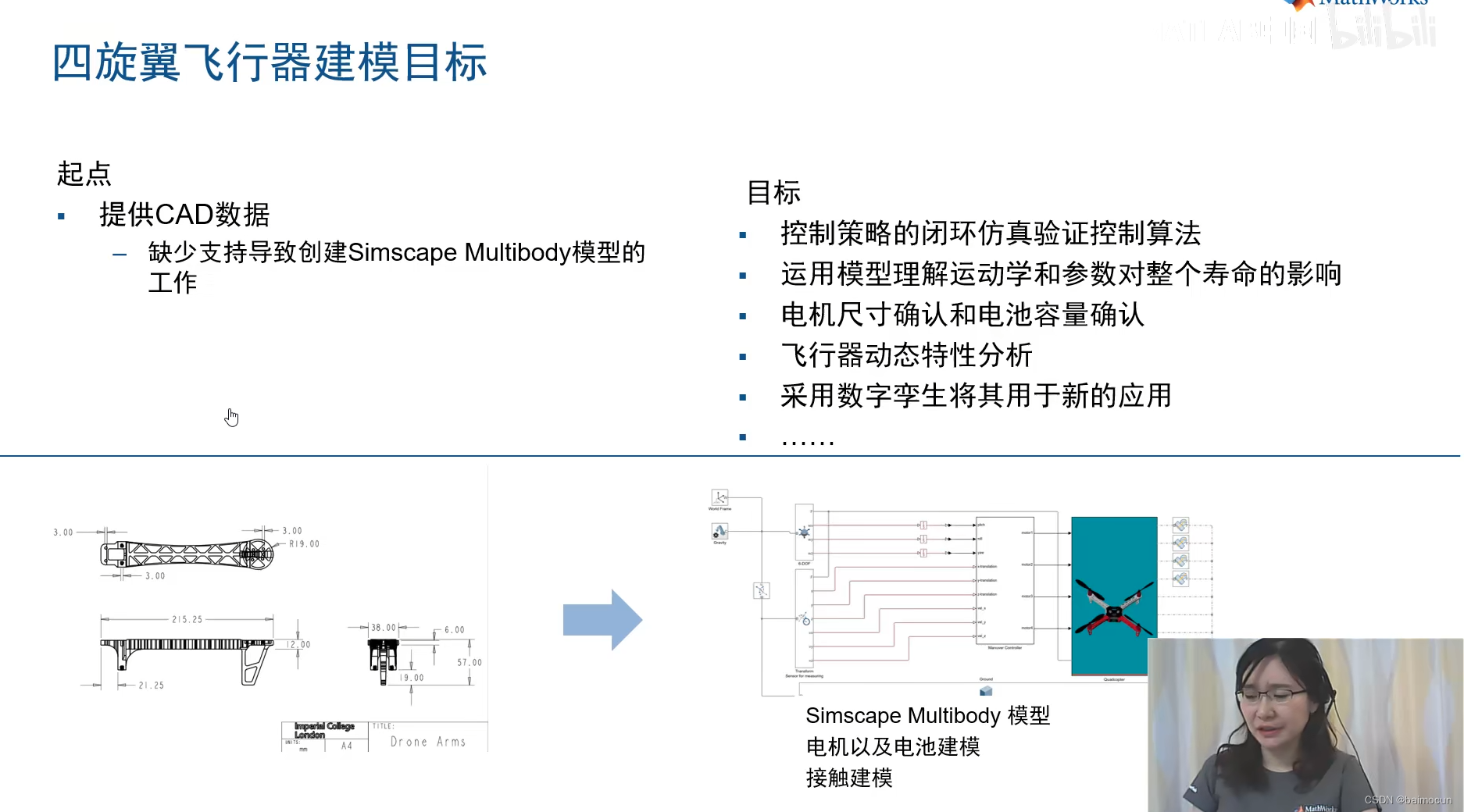
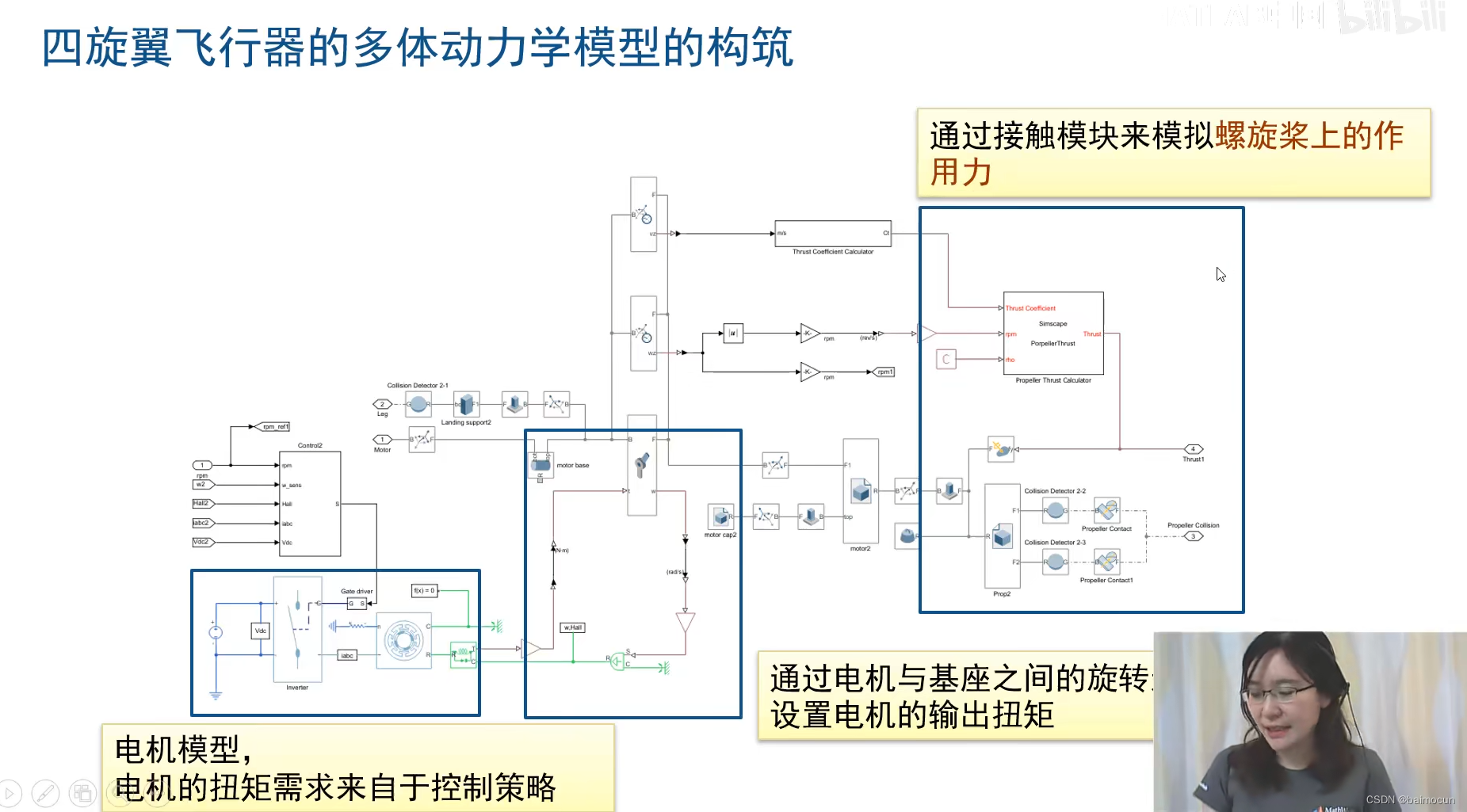
四旋翼飞行器建模案例
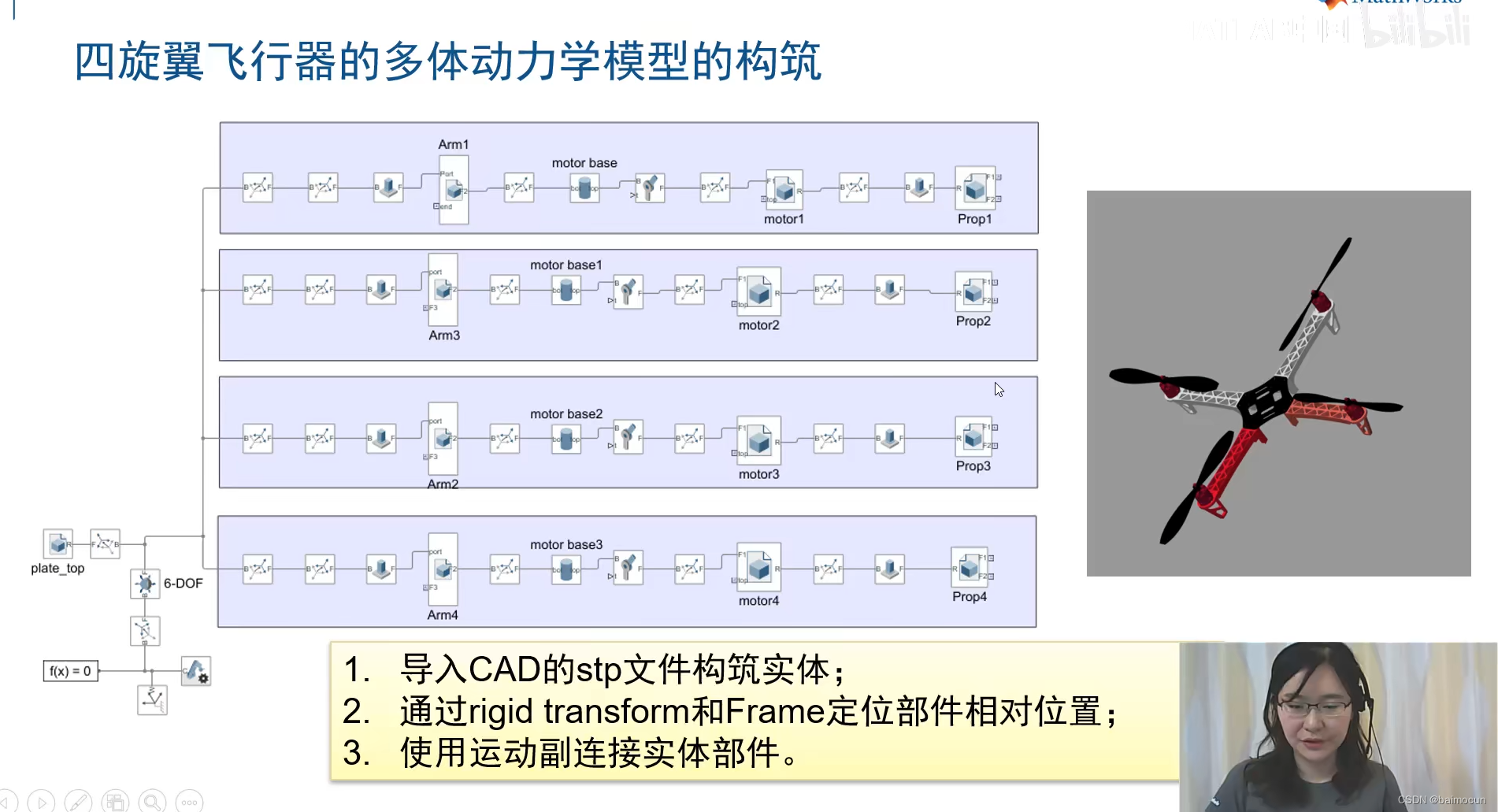
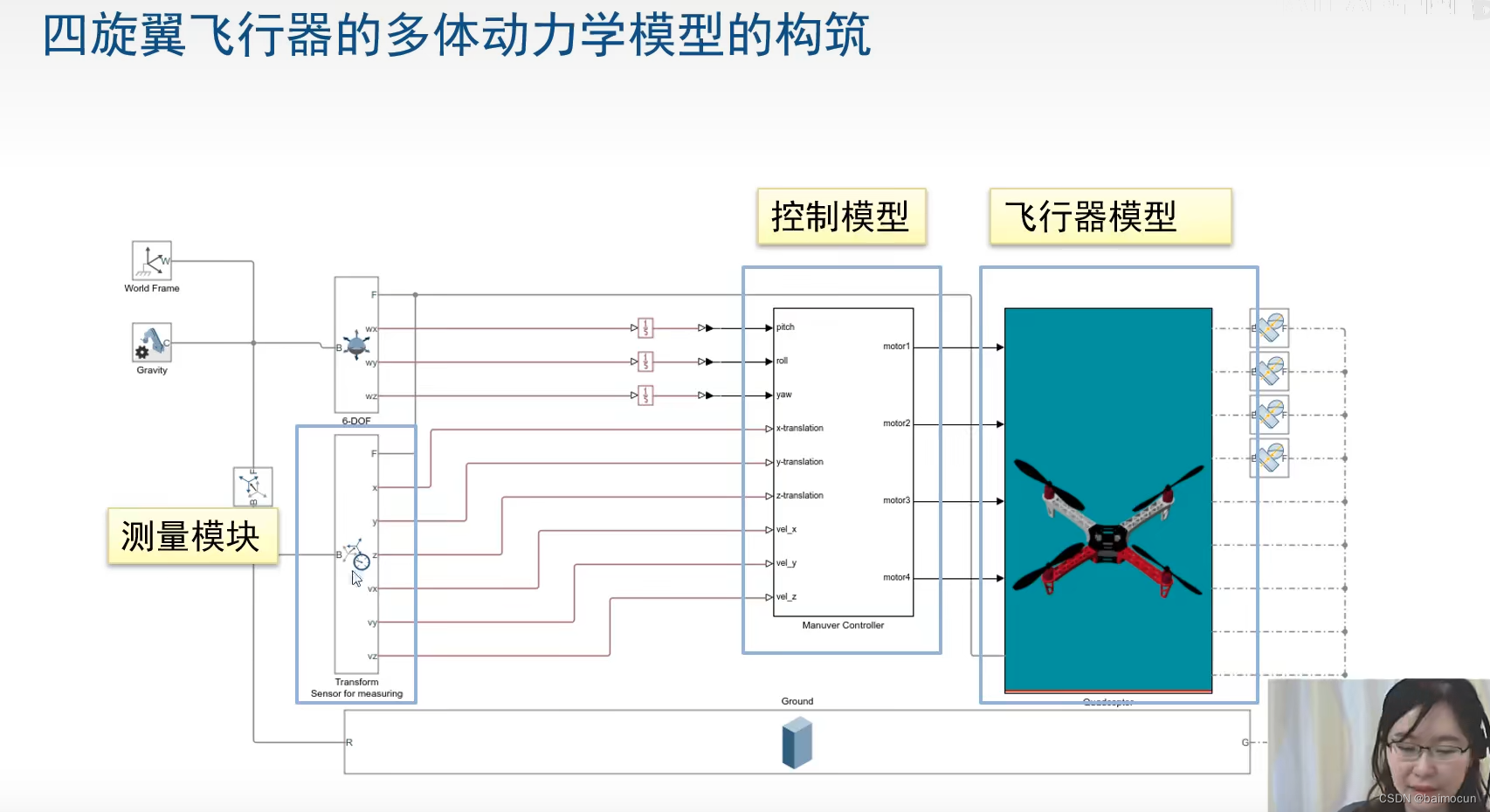
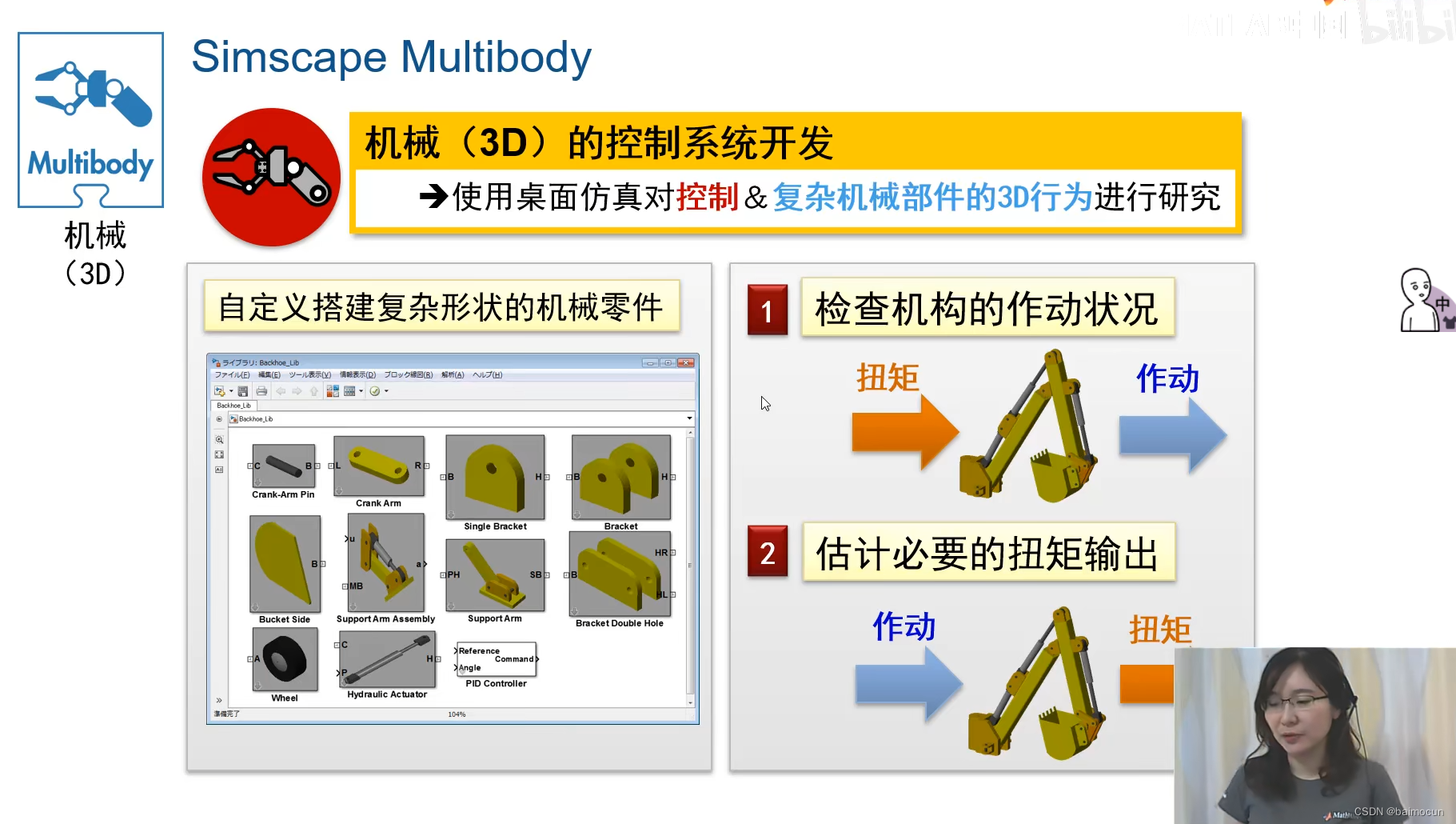
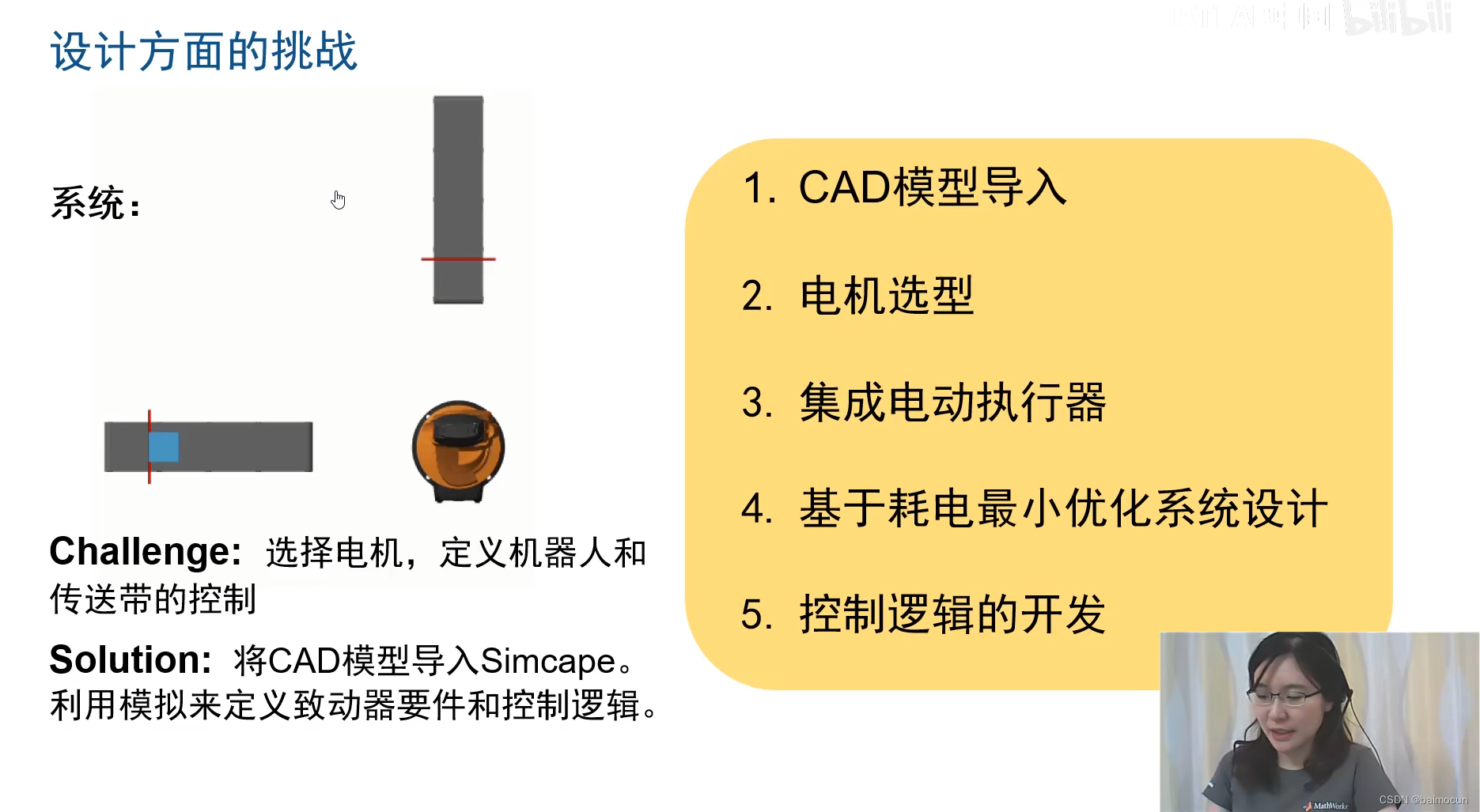
物理建模的作用:1、在机器人开发过程中,对机器人的控制策略进行验证,需要一个被控对象模型,来实现闭环仿真,来验证控制算法。
2、对于机器人的使用者而言,早期数据维护时,需要一个数字孪生模型,物理建模可以提供解决方案。
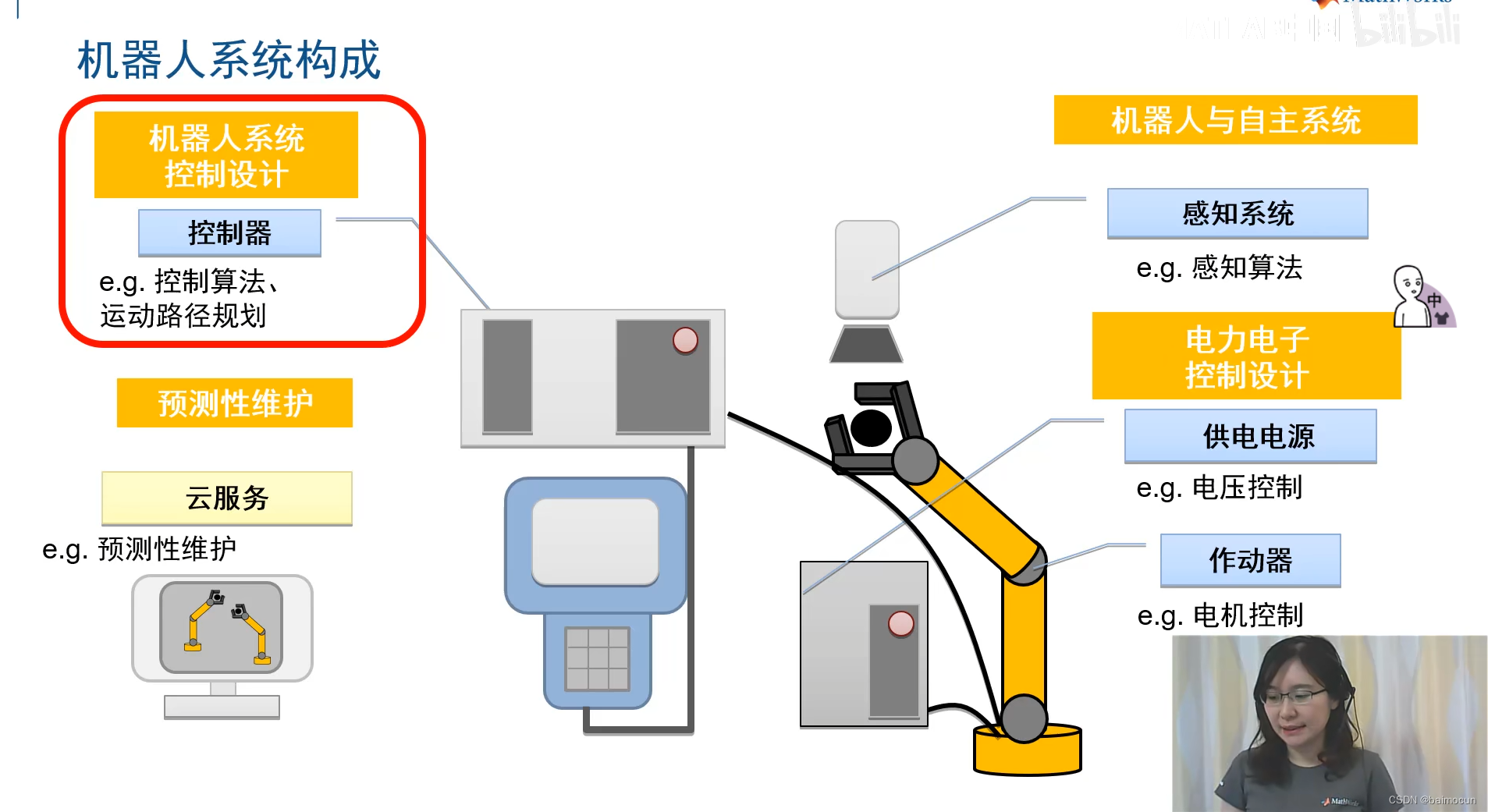
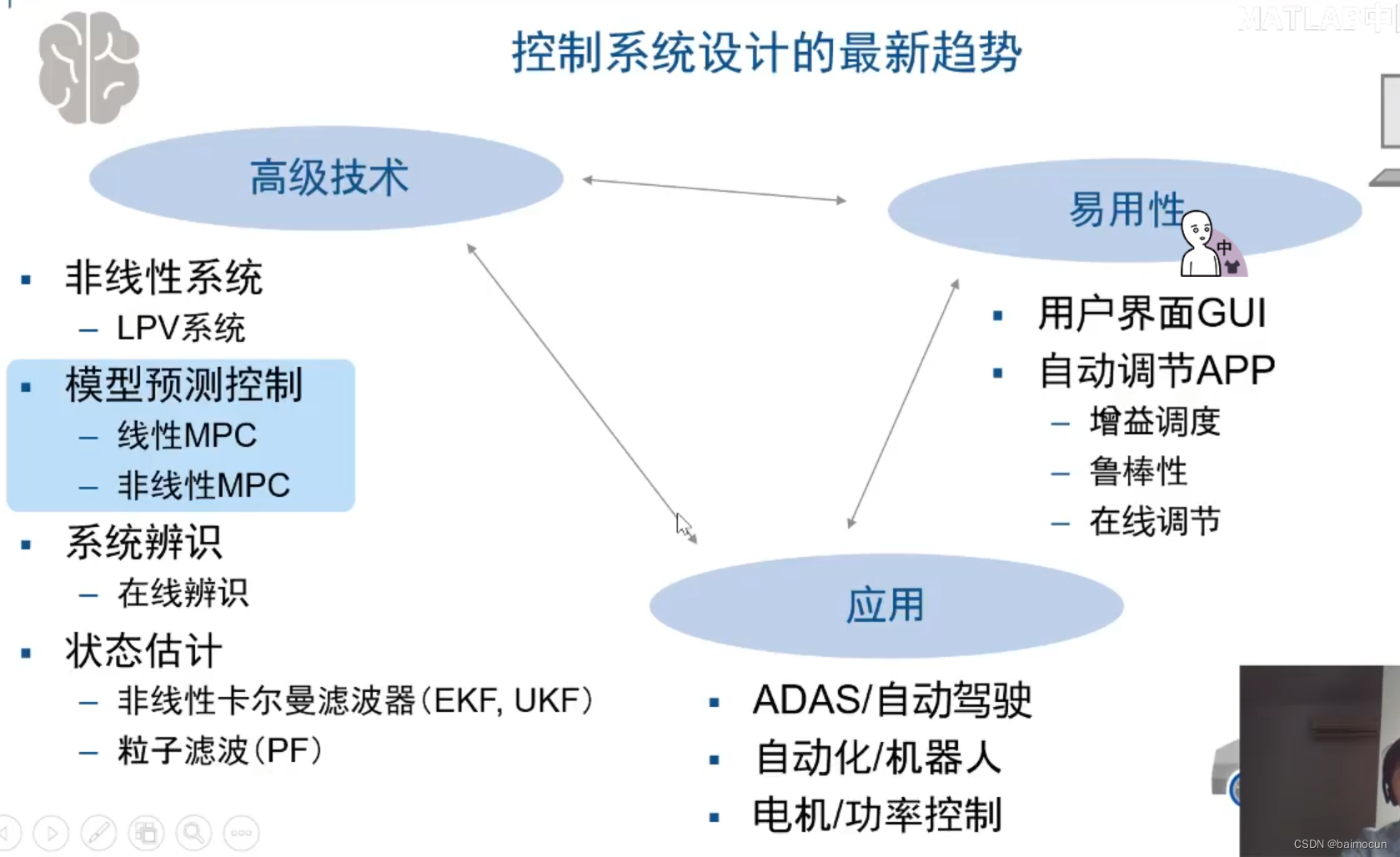
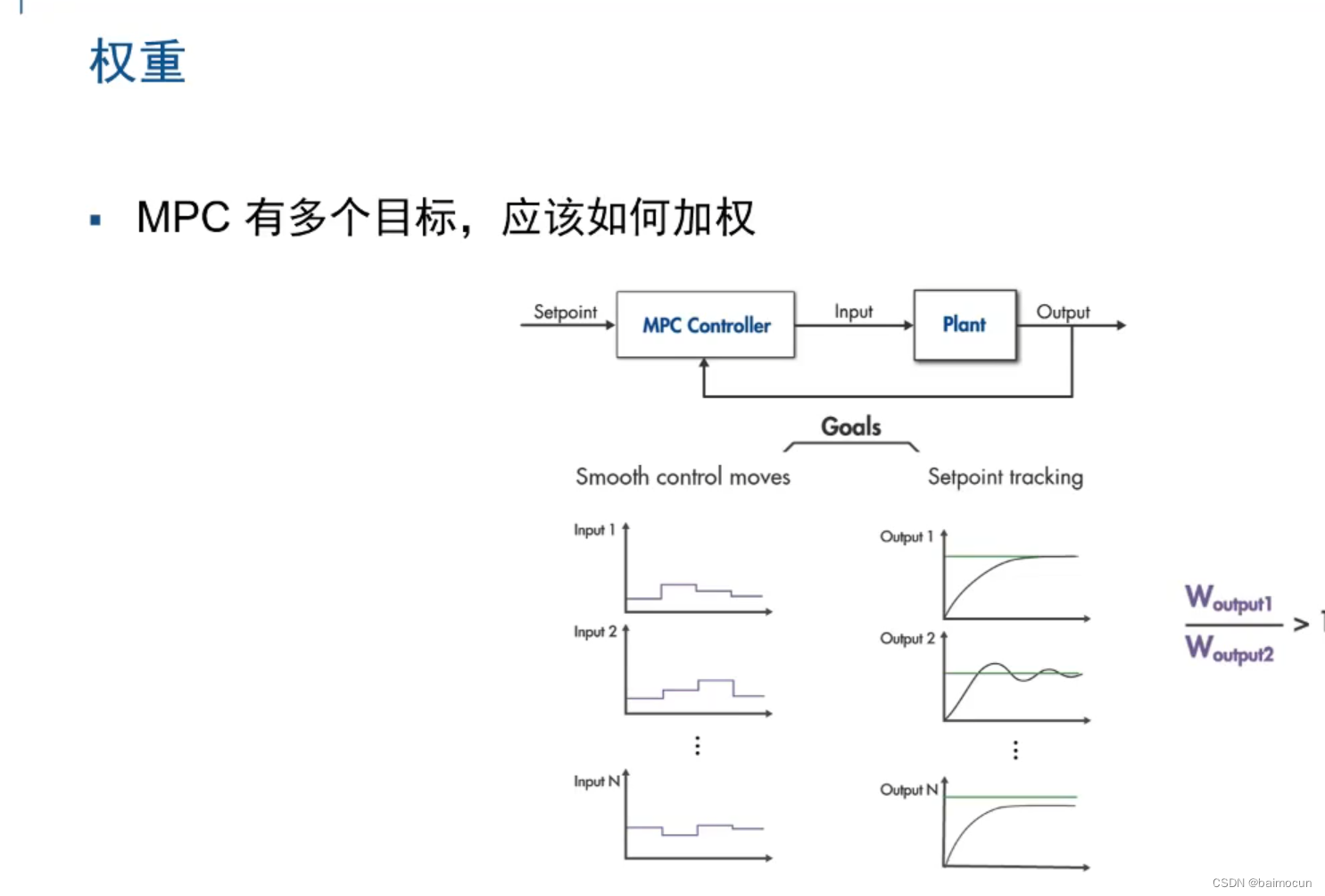
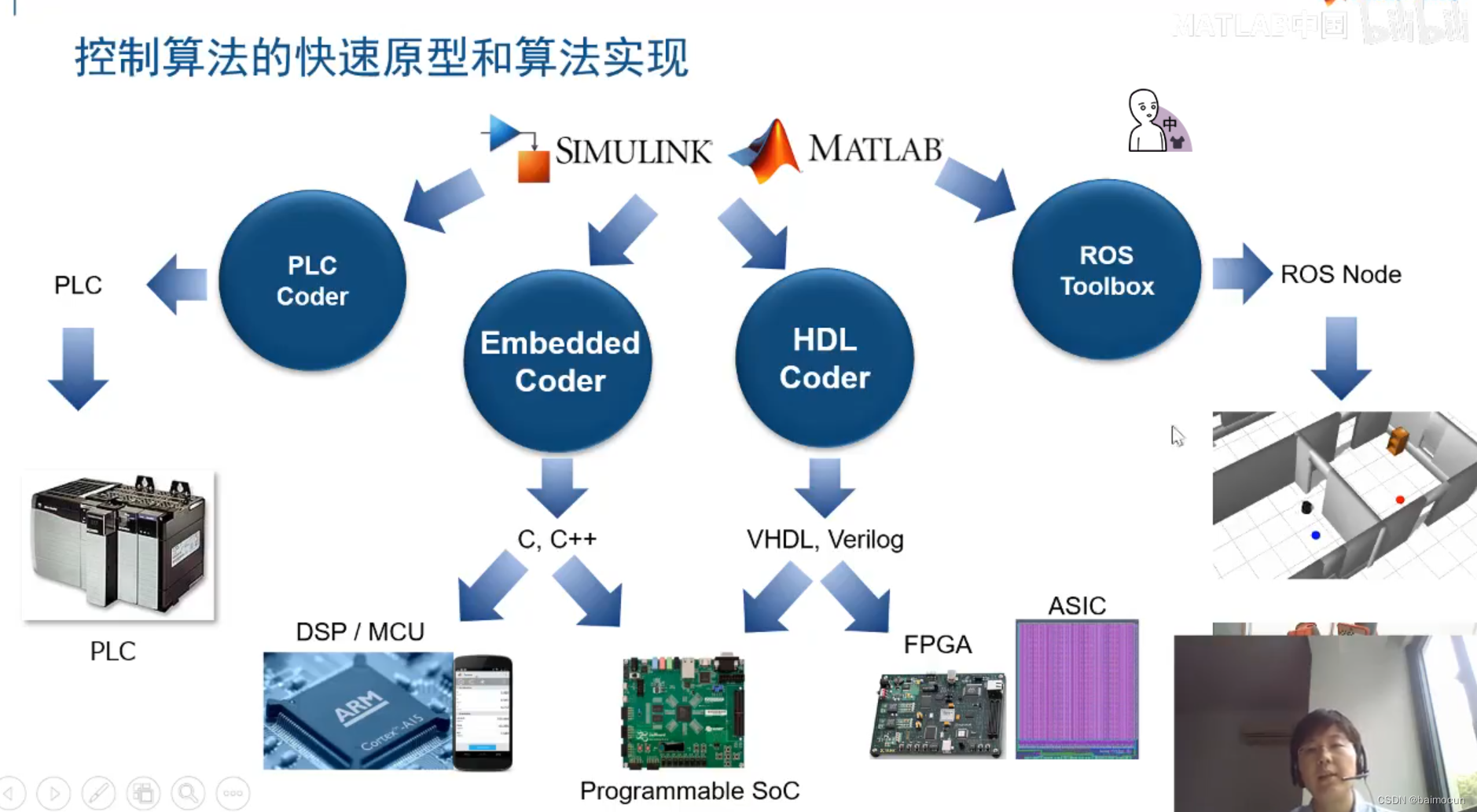
机器人控制算法设计:从理论到实现
控制系统对于机器人的引入,主要是为了改善原有的一些特征,比如说如何使系统跟踪性能更好,抗扰动性能更强,鲁棒性更高。此外,在不同的应用场景下,使用什么样的算法,不同的参数应该如何调整。
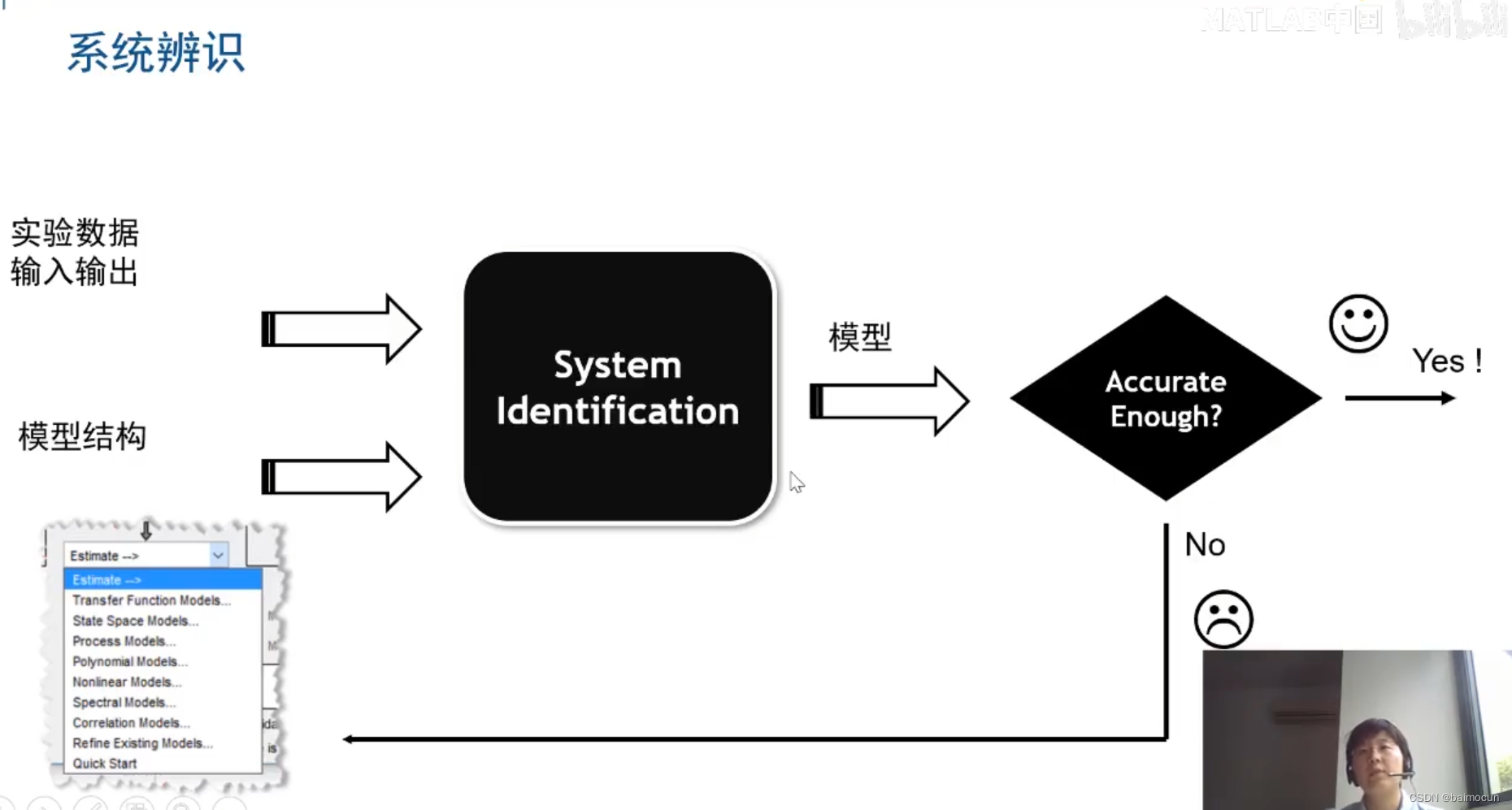
系统辨识主要是依据系统输入输出的时间函数,来确定描述系统的行为,若系统里边所有的特性都是比较确定的 那基本可以使用这种数学方程的方式描述出来。但是在有一些比较精密的这样的加工领域里边,我们可能希望这个控制精度能够达到微米级,这样的系统里面,它有许多的这种非线性的因素、以及外界的干扰都是我们需要考虑的,比如这种摩擦力、机械变形等等,我们能通过这种系统辨识的方式,可以把这样的一些因素给它明确的确定出来。
系统描述的越准确,那我们针对于模型控制性能也会越好。
实例:柔性飞翼飞机额模态分析
Matlab提供了系统辨识APP
在这里插入图片描述
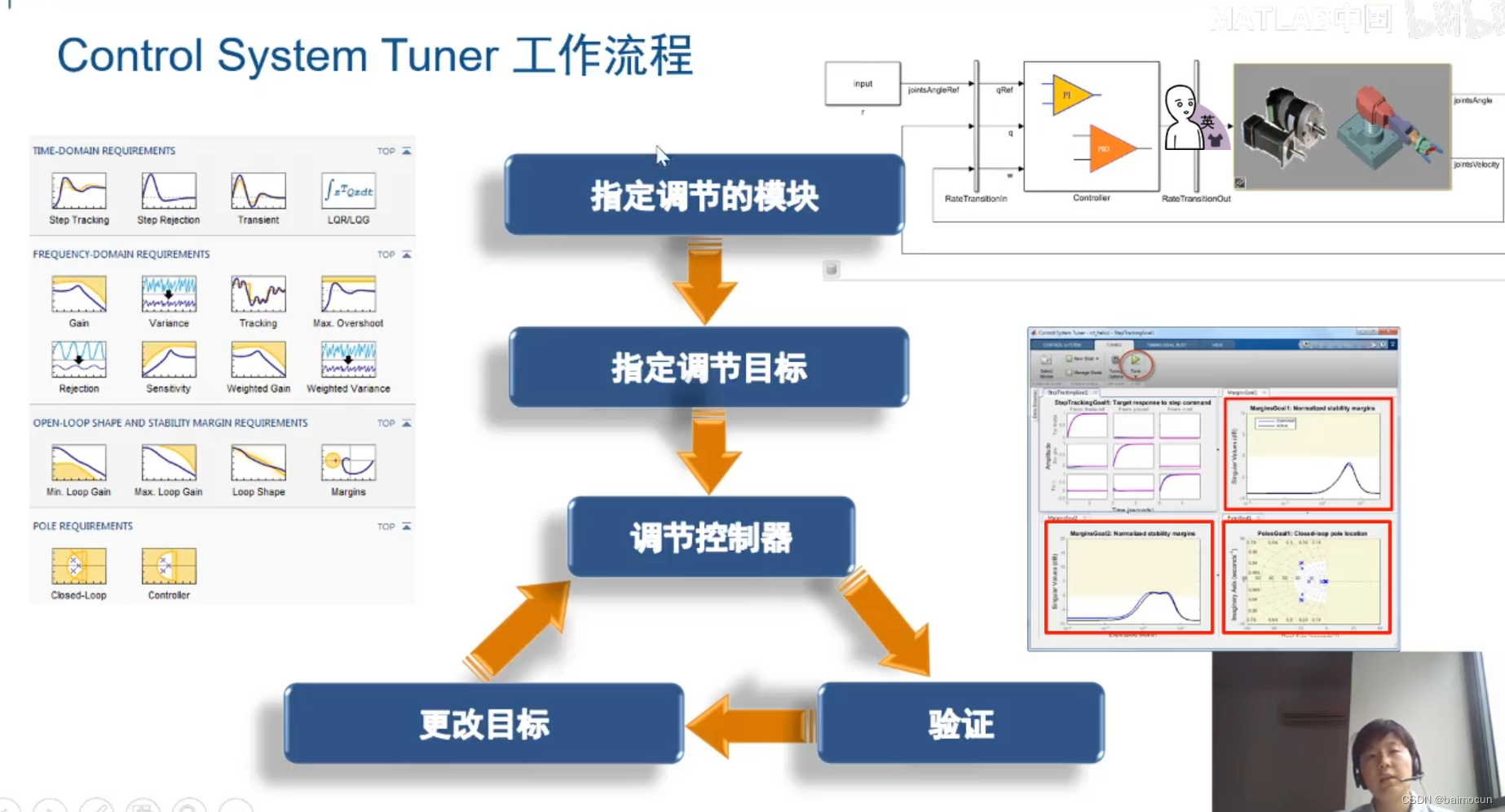
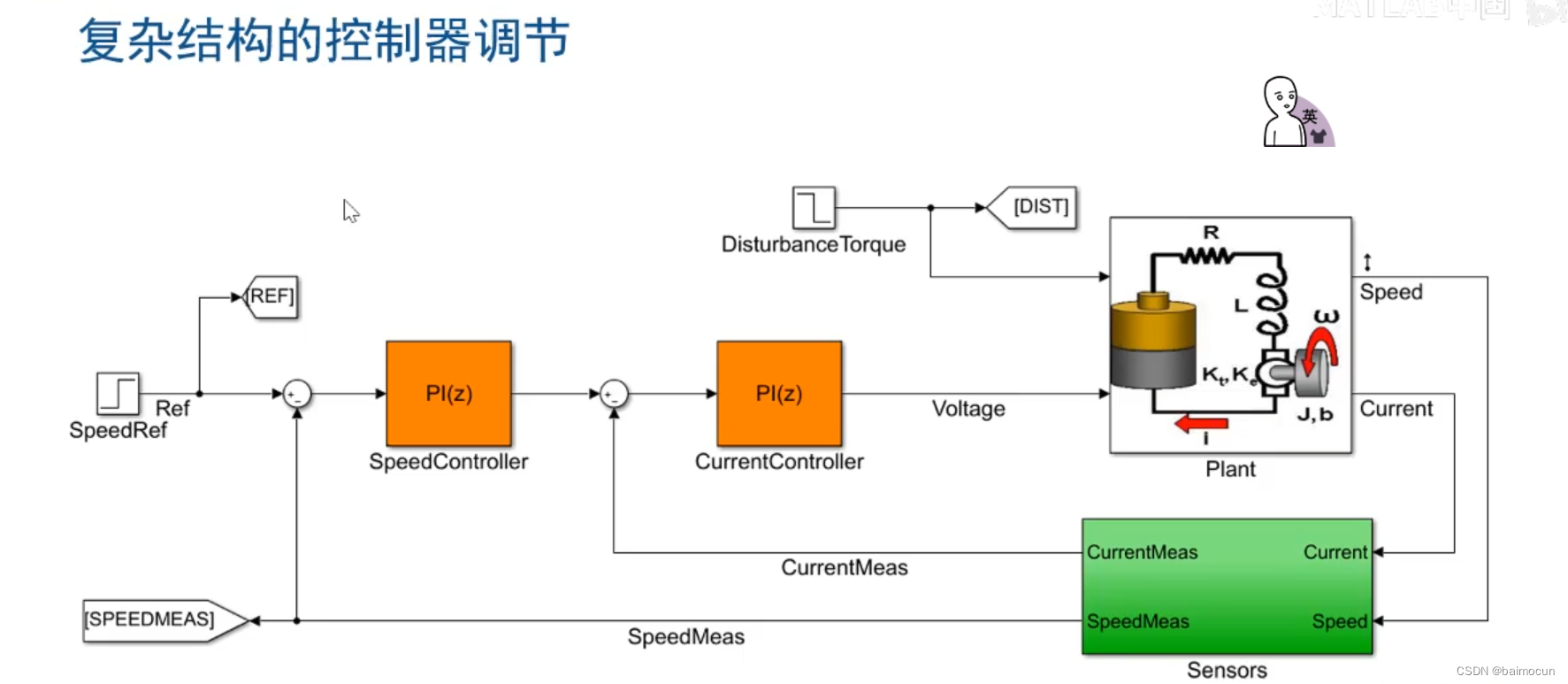
Matlab控制工具箱可以进行自动调优
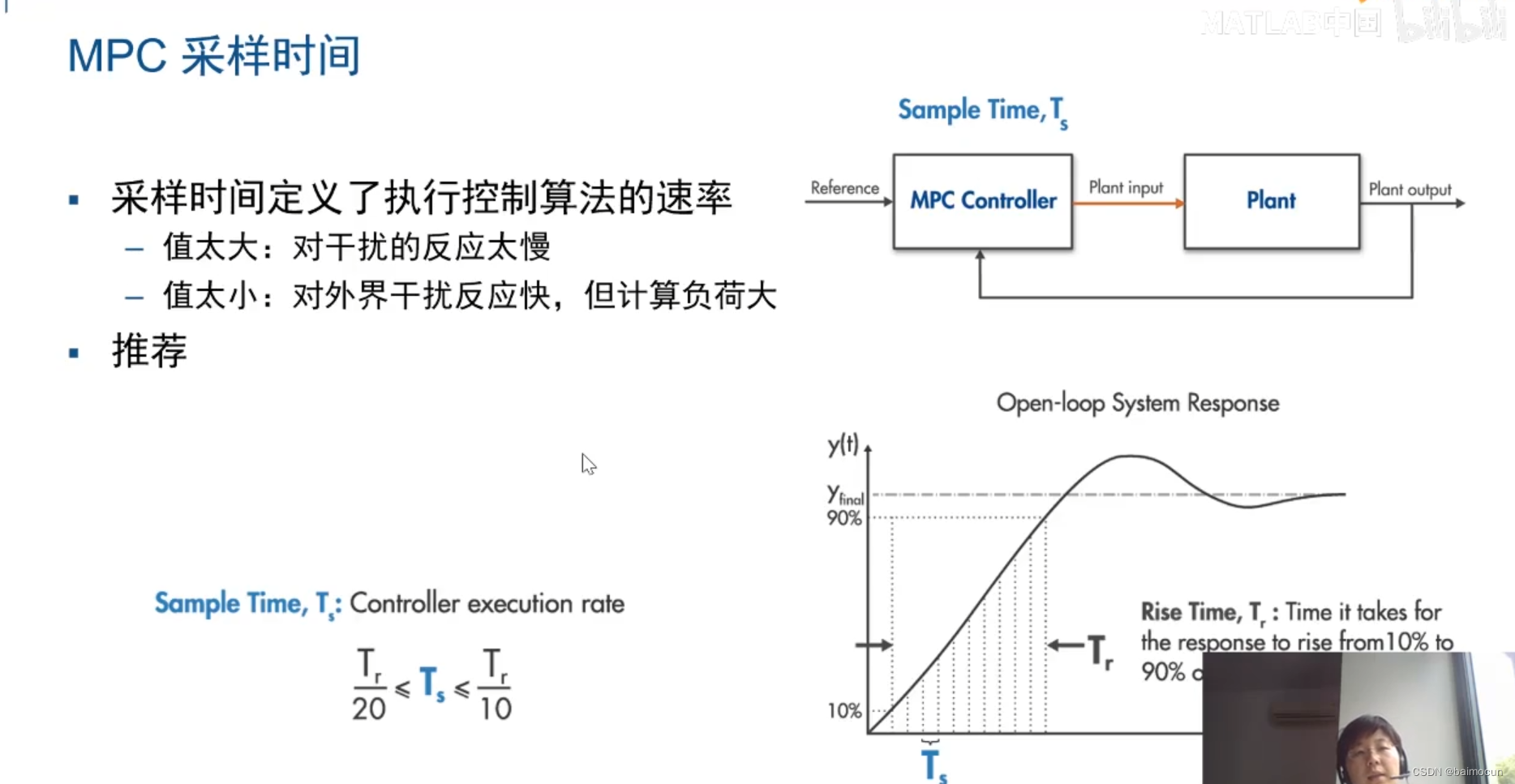
推荐采样时间在控制器执行速率的十分之一到二十分之一


















 5596
5596

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









