







文章目录
1.ROS2的系统架构
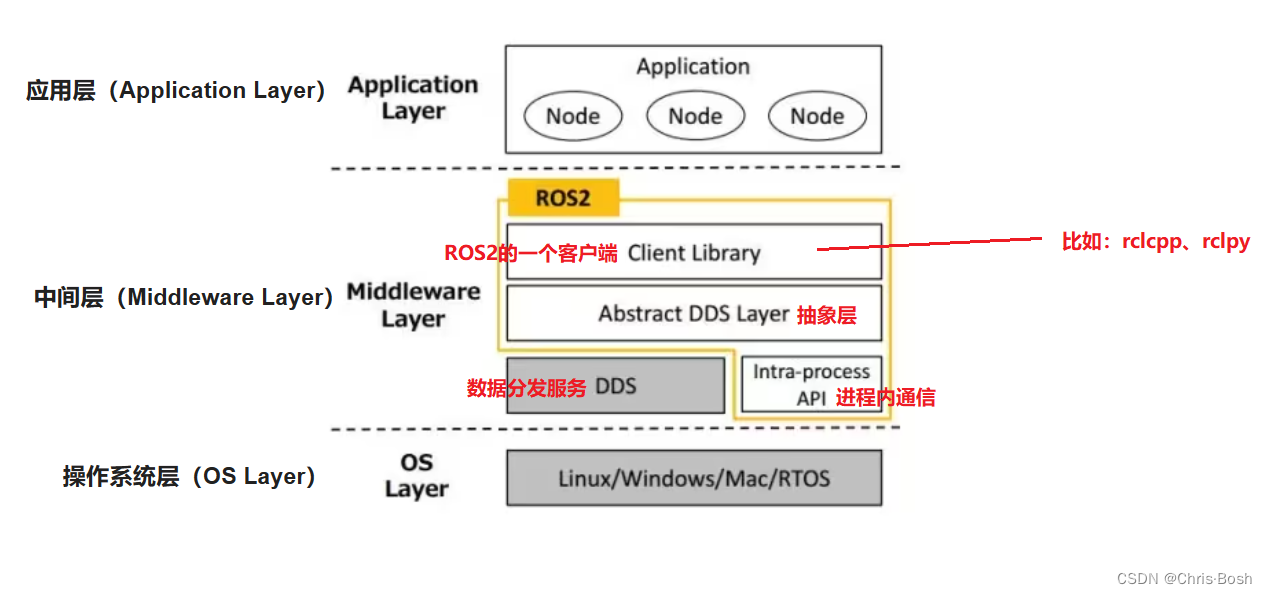
开发者的工作内容一般都在应用层,开发人员需要通过实现具有某一特定功能的功能包来构建机器人应用程序。
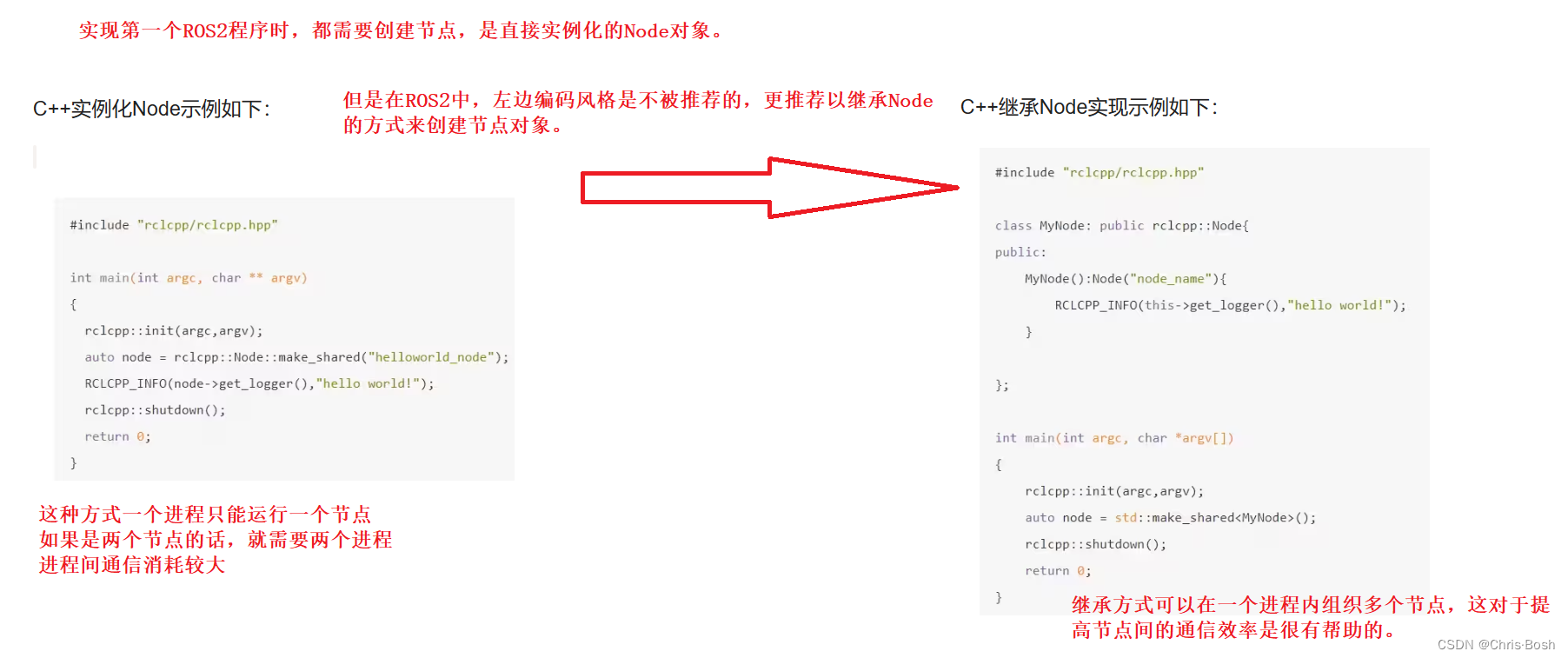
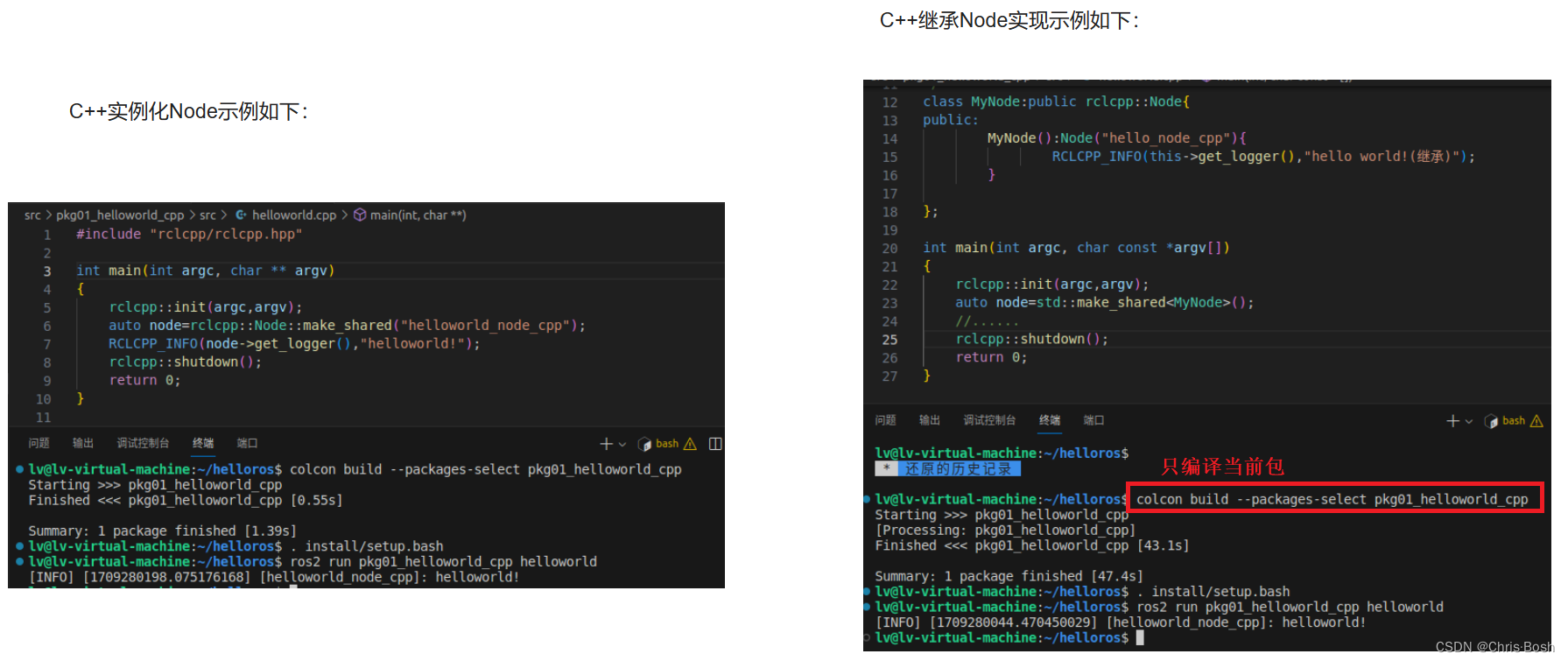
2.ROS2的编码风格
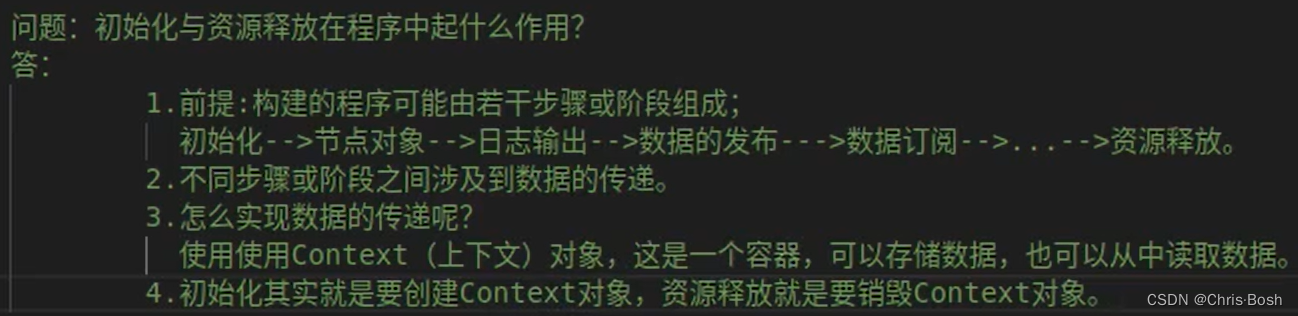
3.细谈初始化和资源释放
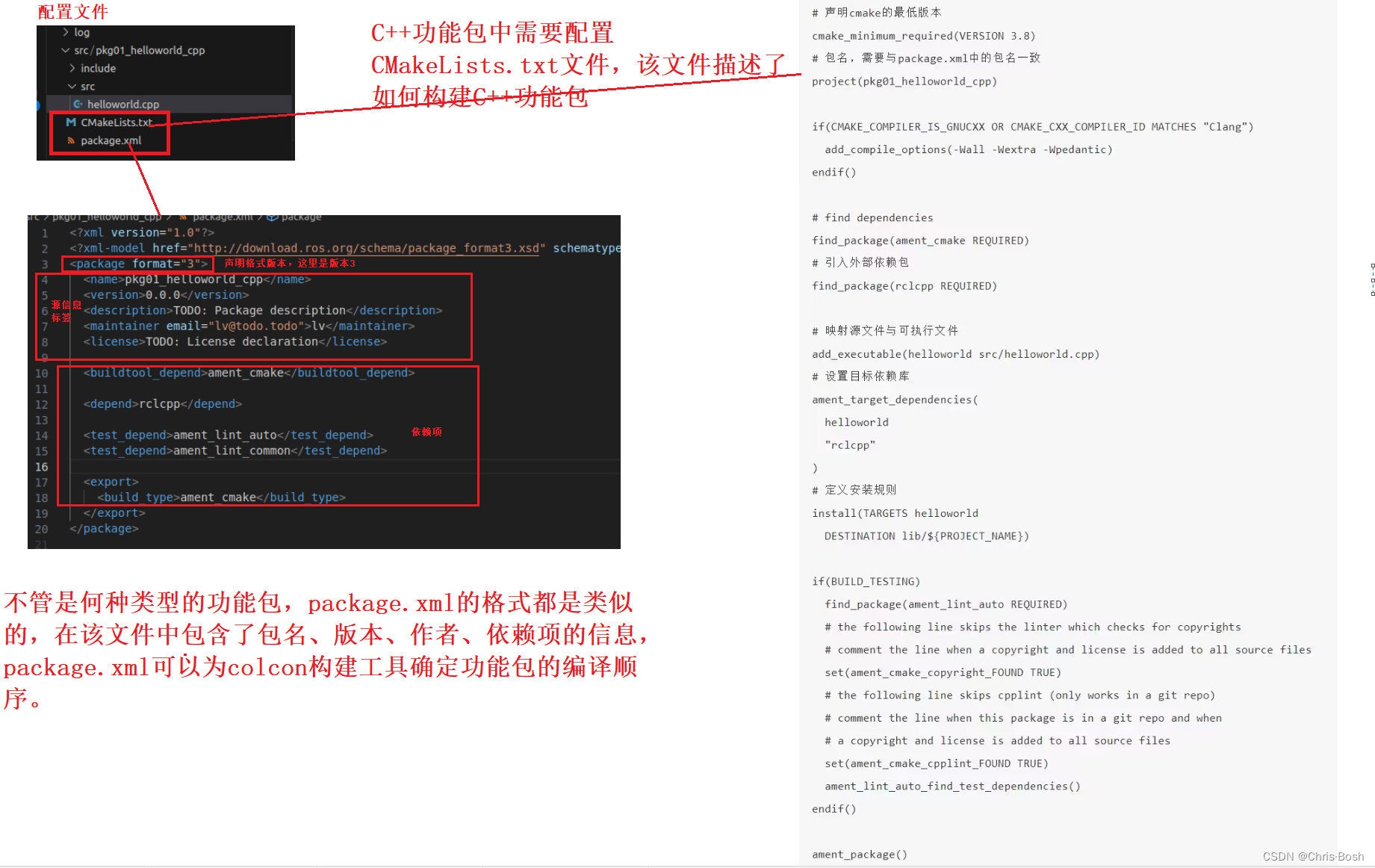
4.细谈配置文件
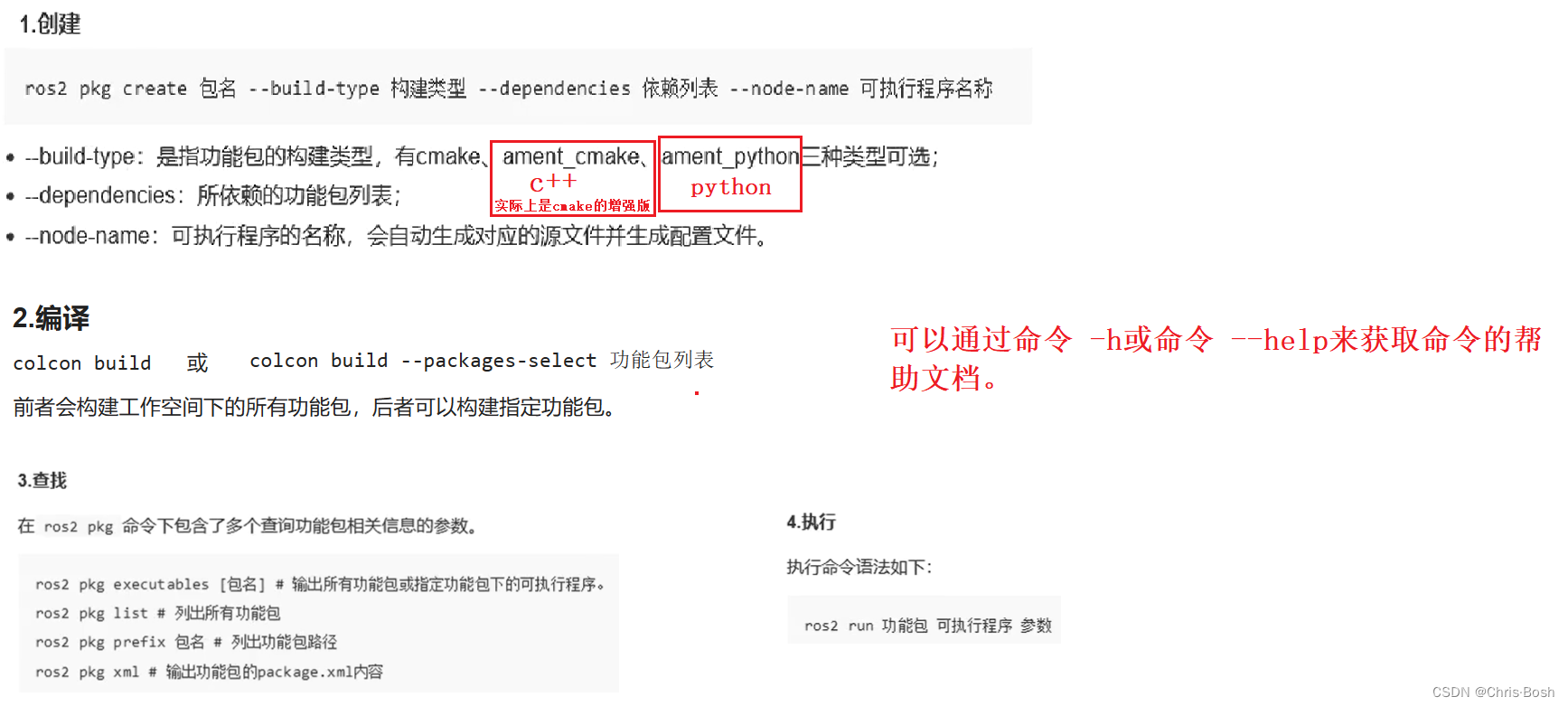
5.ROS2的一些命令
6.ROS2的核心模块
6.1 通信模块
ROS2中是如何控制机器人底盘运动的 ?
雷达、摄像头这些传感器是如何传输到ROS2上的?
导航、机械臂等系统性实现不同模块之间是如何交互数据的?
这些都是属于通信模块的内容!
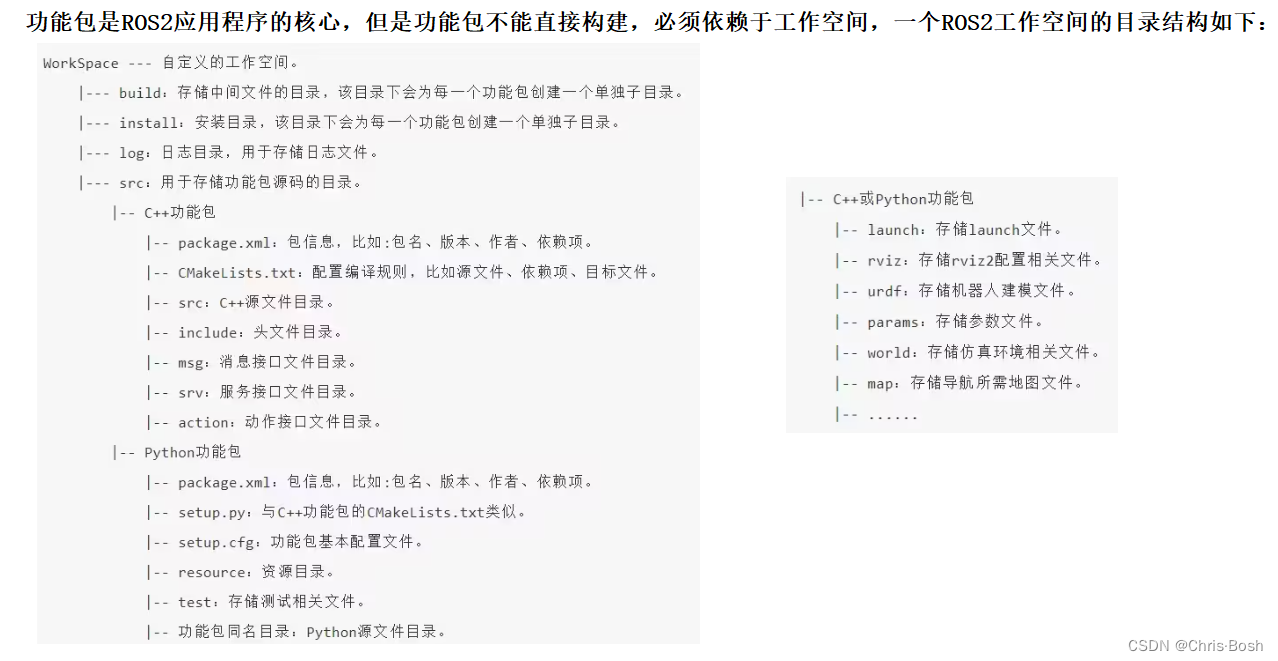
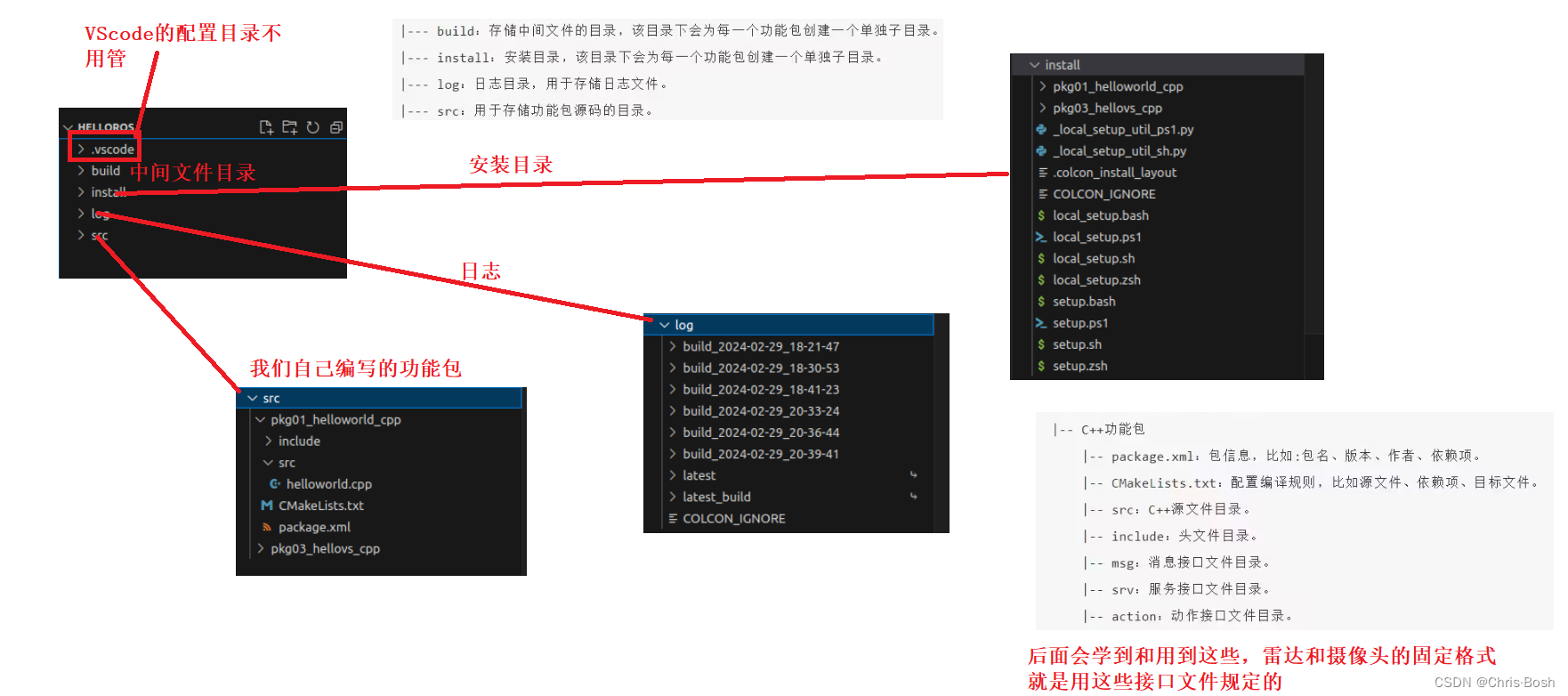
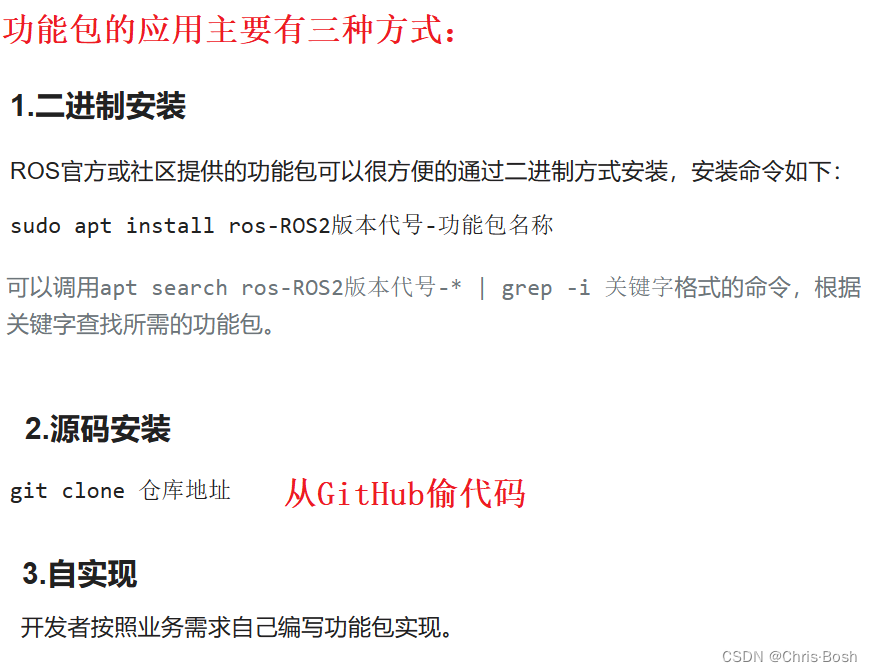
6.2 功能包
6.3 分布式
ROS2是一个分布式架构,不同的ROS2设备之间可以方便的实现通信,这在多机器人设备协同中是极其重要的。
6.4 终端命令和rqt
在ROS2中提供了丰富的命令行工具,可以方便的调试程序、提高开发效率。
rqt是一个图形化工具,它的功能与命令行工具类似,但是图形化的交互方式更为友好。
6.5 launch
通过launch文件,可以批量的启动ROS2节点,这是在构建大型项目时启动多节点的常用方式。
6.6 TF坐标变换
TF坐标变换可以实现机器人不同部件或不同机器人之间的相对位置关系的转换。
6.7 可视化RVIZ
ROS2内置了三维可视化工具rviz2,它可以图形化的方式显示机器人模型或显示机器人系统中的一些抽象数据。
提示:这里对文章进行总结:















 2354
2354











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











