







前言
上一篇文章我讲述了如何使用自己的视频运行ORB-SLAM2
链接如下:
链接: 上一篇,环境搭建及使用自己的视频运行ORB-SLAM2
没有搭建环境的朋友看上面我的链接哦,里面有超详细的环境搭建,一步一步来保姆级别的哦
那么本篇,就在用自己视频的基础上更近一步,我来教大家如何使用摄像头运行ORB_SLAM2
本篇会涉及到ROS的安装,usb_cam的下载,还有运行ORB_SLAM2的相关知识。
1.下载ROS
链接: 下载ROS
按照操作一步一步来就可以,注意安装的时候要选择对应的版本,我用的是Ubuntu20.04所以我选的ROS版本是noetic
大家不知道要选择什么版本的上网搜一下就可以。
2.下载usb-cam
网上很多方法十分复杂,我在这里给大家推荐一种最简单的,只需一行命令即可:
sudo apt-get install ros-noetic-usb-cam
注意我的ROS版本是noetic所以上面写的是noetic
如果你们的版本不是这个要换掉,否则会出错。sudo apt-get install ros-kinetic-usb-cam有很多人其实是这个
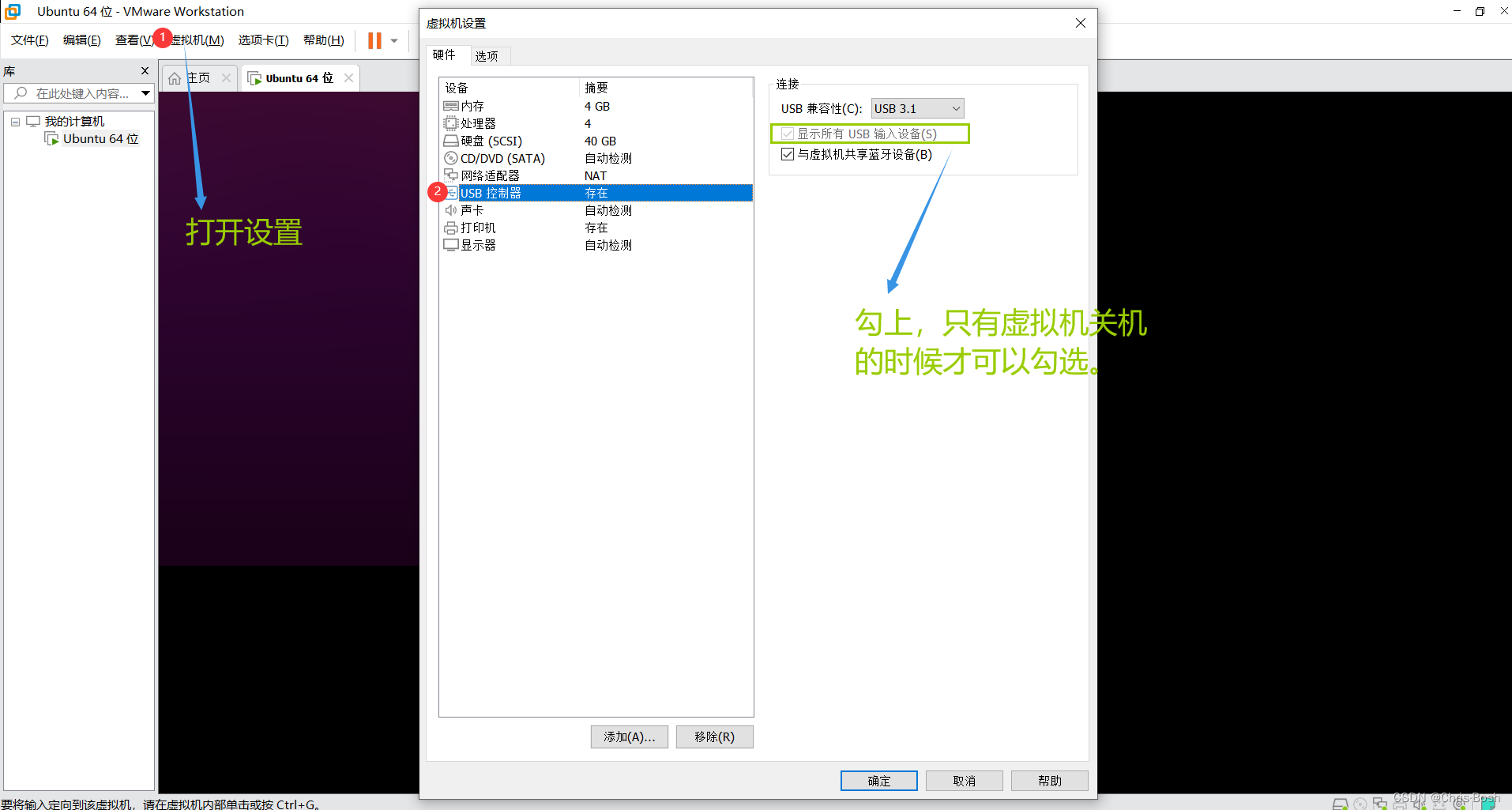
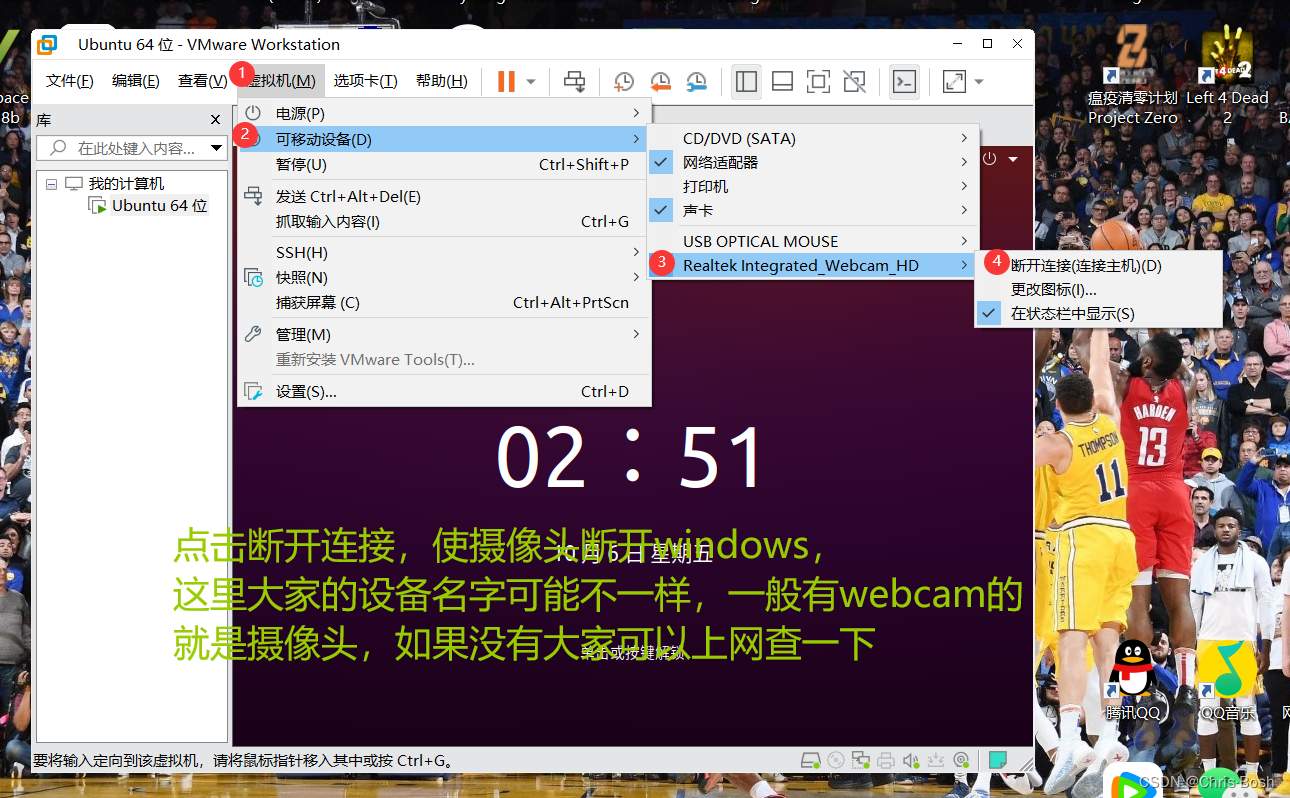
3.调试摄像头
首先我们要确认我们的电脑有没有摄像头,摄像头是不是好的。大家可以进入腾讯会议,美颜确认一下哈哈哈。
然后关闭虚拟机(关机)
然后输入下面的代码:
roslaunch usb_cam usb_cam-test.launch
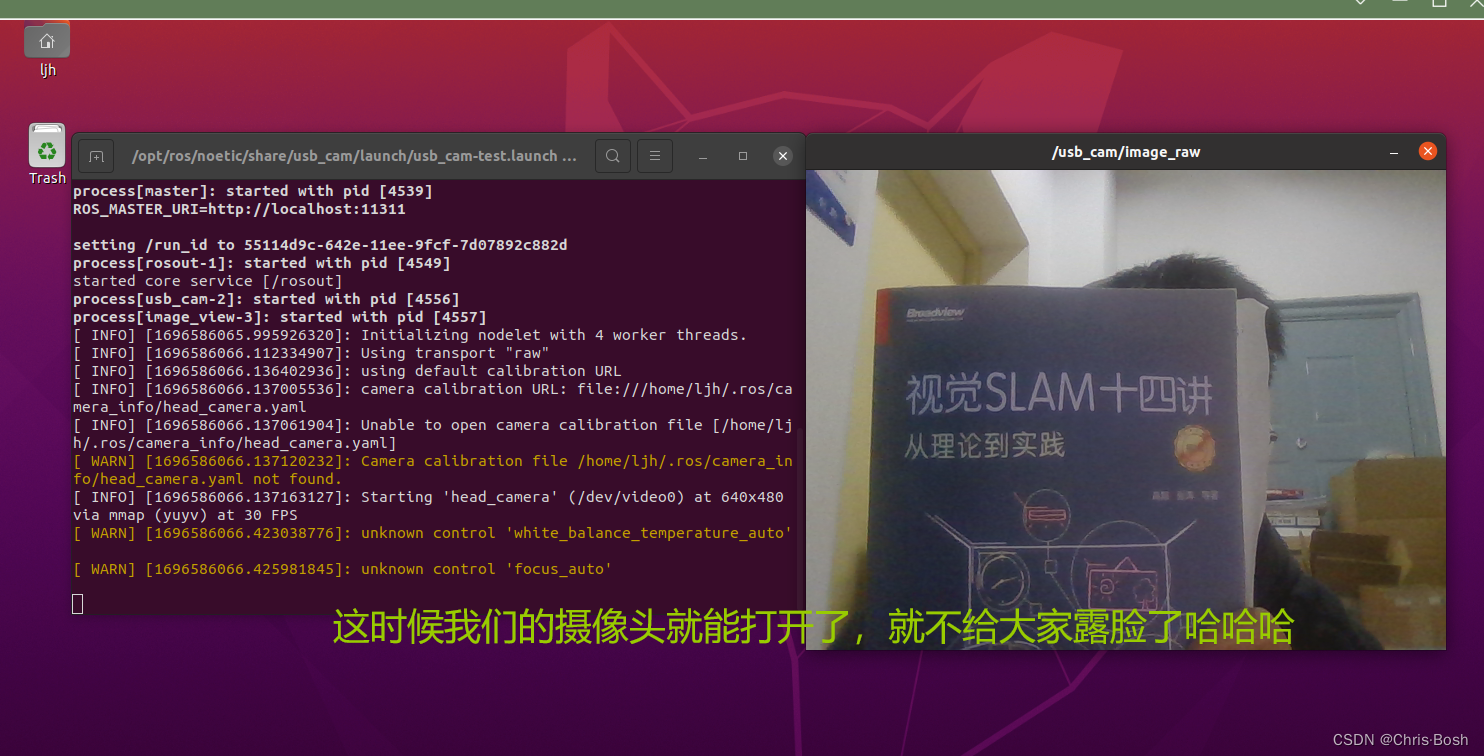
然后我们马上就可以运行ORB_SLAM2了
4.以电脑摄像头运行ORB_SLAM2
上一篇文章我讲述了如何使用自己的视频运行ORB-SLAM2
链接如下: 链接:
点这里大家比较着学习哦。
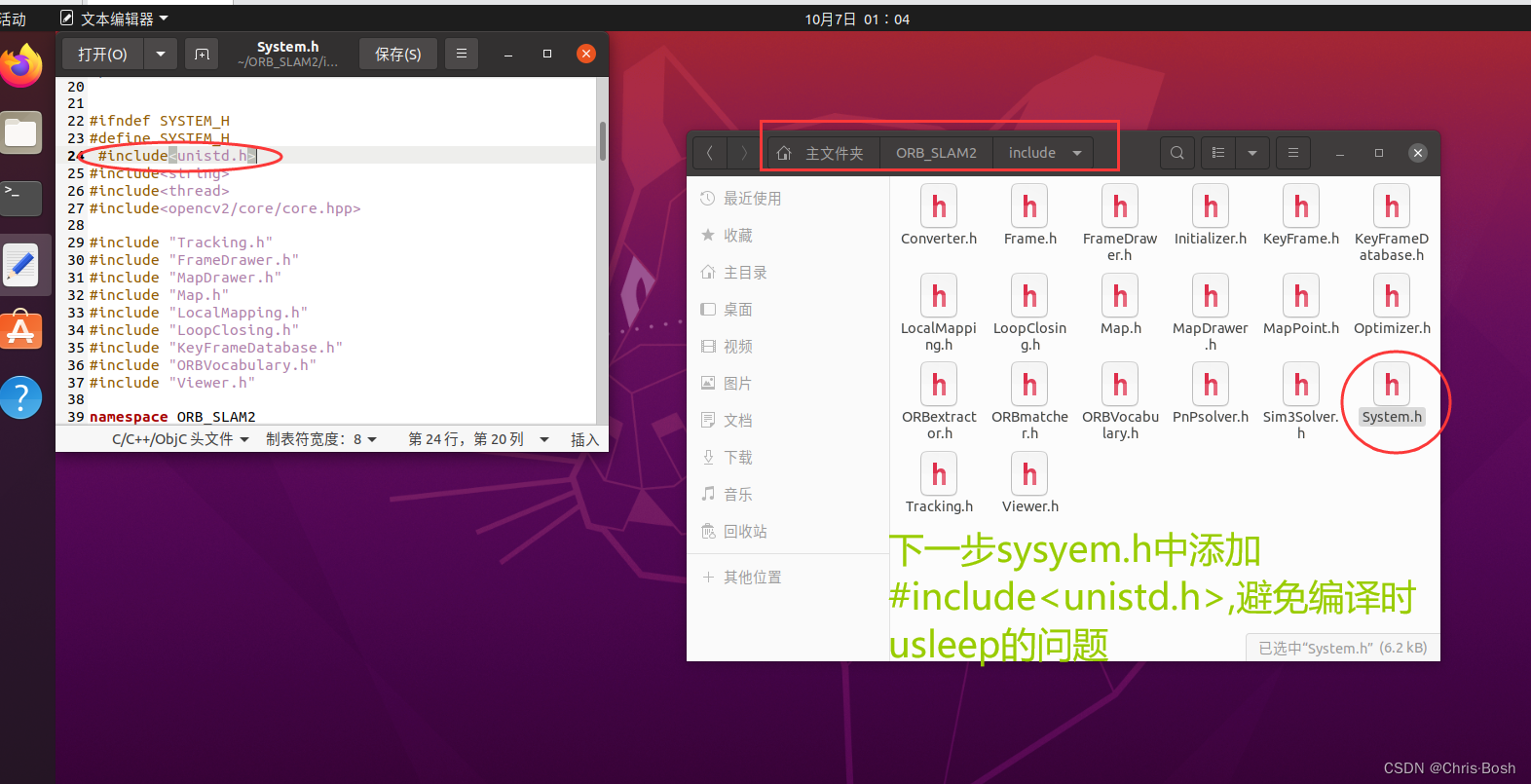
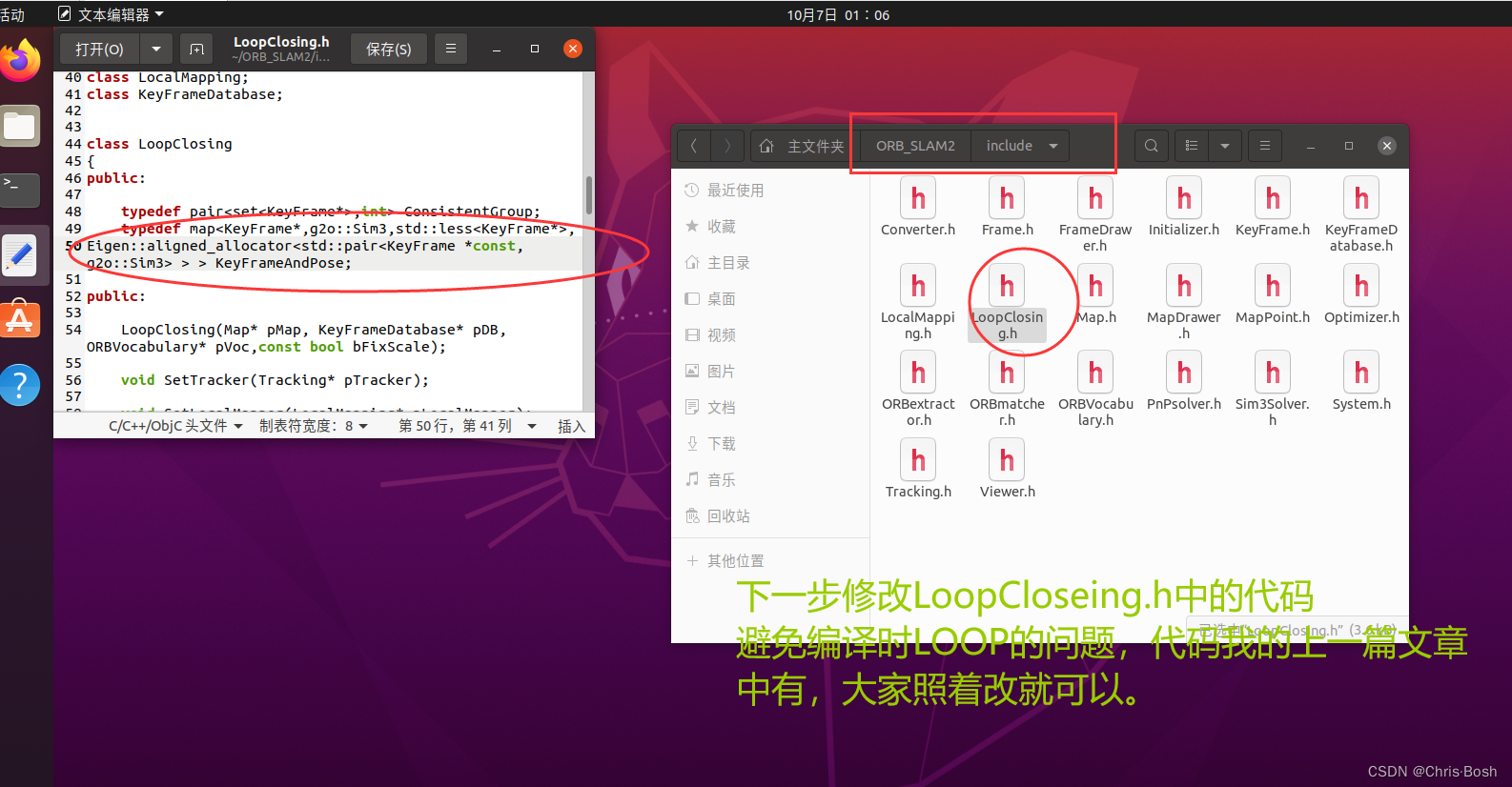
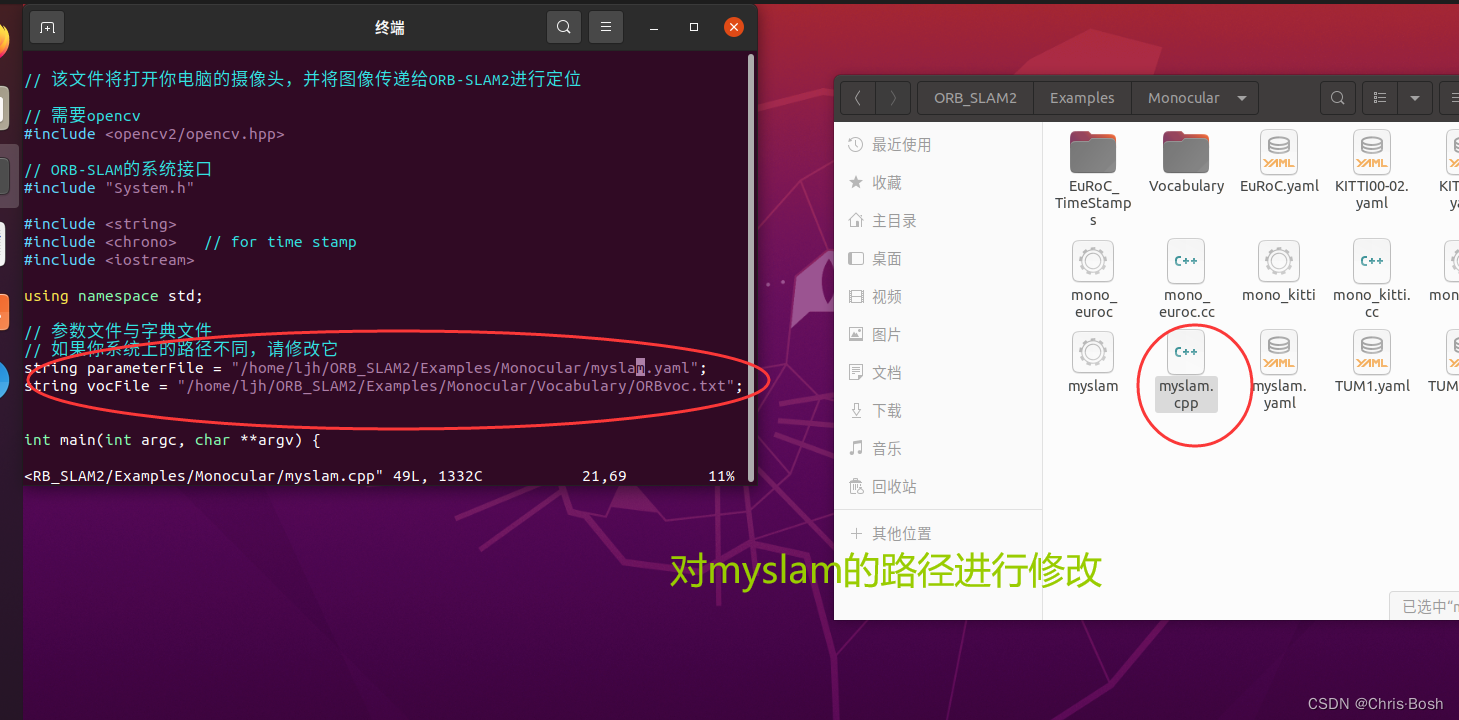
这里的操作和之前都一样,但是为了大家方便学习,我拿一个新的ORB_SLAM2文件从头开始。


add_executable(myslam Examples/Monocular/myslam.cpp)
target_link_libraries(myslam ${PROJECT_NAME})

完成这些,大家就可以编译了,先返回主目录
cd ORB_SLAM2
# 赋予shell文件运行权限
chmod +x build.sh
./build.sh
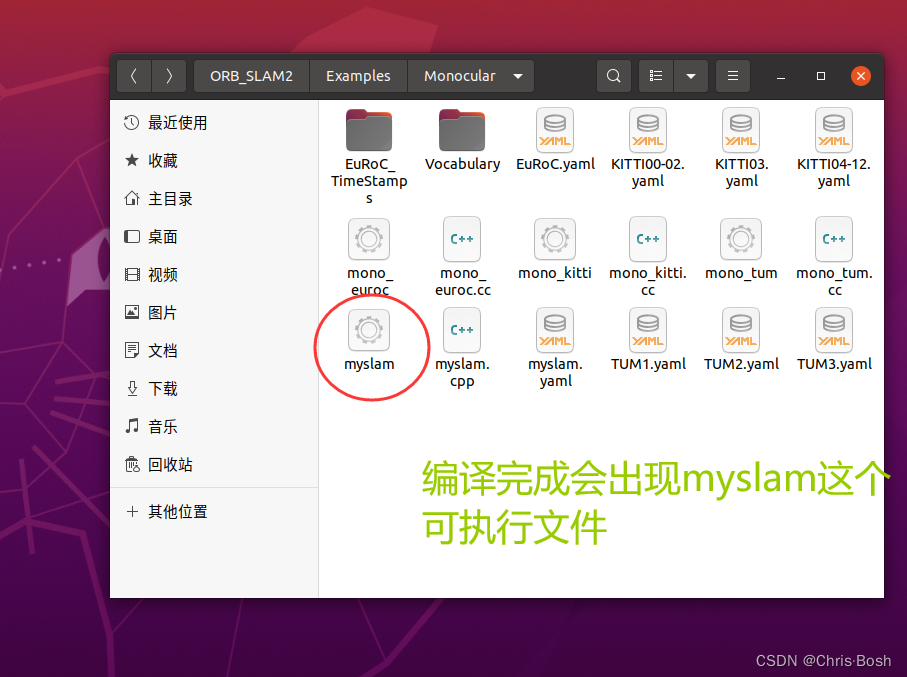
#运行运行
./myslam
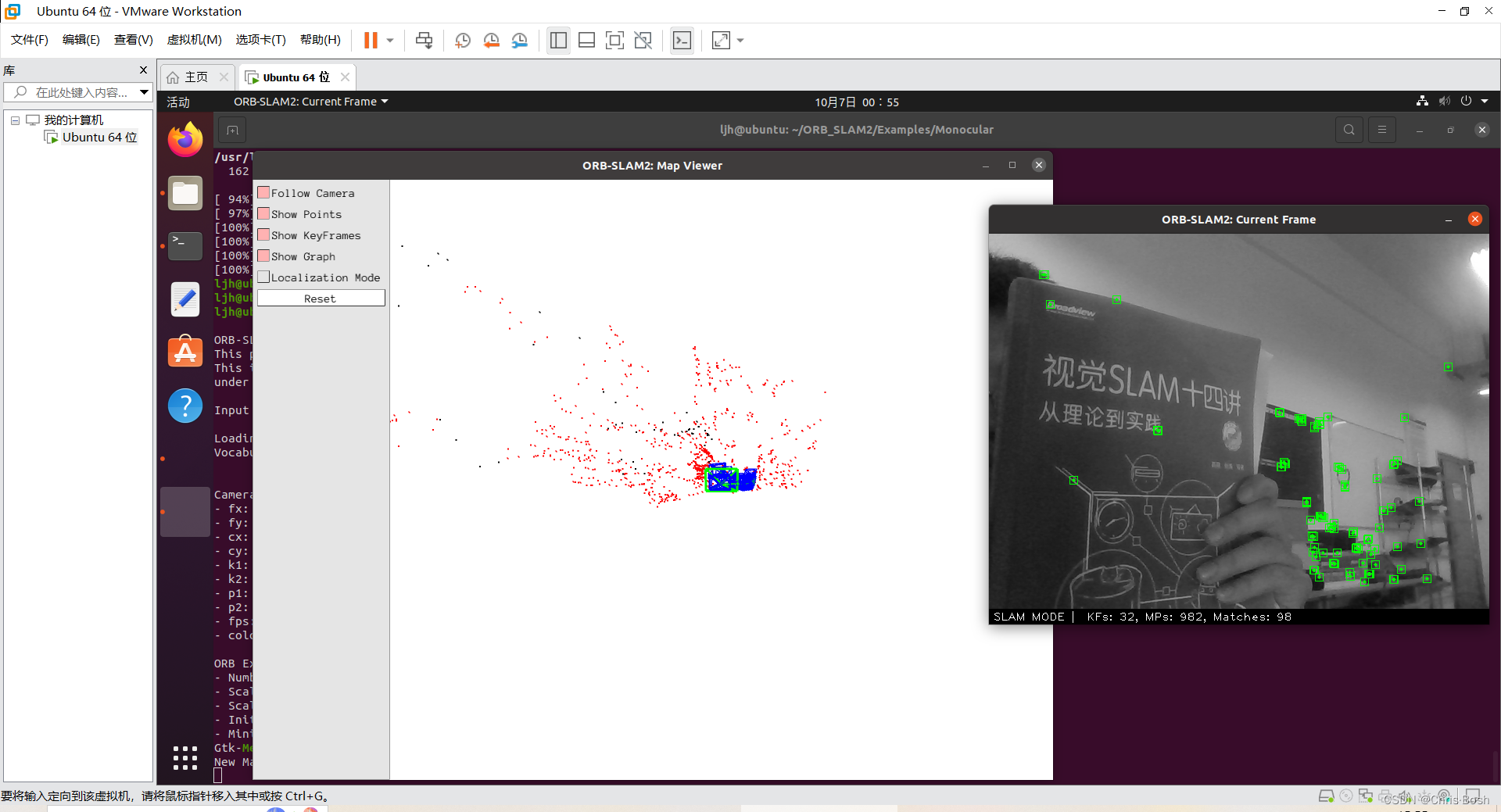
运行成功,到这里关于运行ORB_SLAM2的所有教程都结束了
希望对大家有所帮助,觉得有用的小伙伴可以关注我哦,我是一个在读研究生,研究方向是视觉SLAM,在不断自学中,也希望有能力的小伙伴多多帮助我!
















 4475
4475











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











