







 本文介绍了开普勒优化算法(KOA)在解决经典组合优化问题——单仓库多旅行商问题(STSP)中的应用。通过将STSP转化为最小化总距离的优化问题,KOA通过调整行星位置寻找最优路径。实验结果显示KOA在精度和运行时间上优于其他算法,具有广阔的应用前景。
本文介绍了开普勒优化算法(KOA)在解决经典组合优化问题——单仓库多旅行商问题(STSP)中的应用。通过将STSP转化为最小化总距离的优化问题,KOA通过调整行星位置寻找最优路径。实验结果显示KOA在精度和运行时间上优于其他算法,具有广阔的应用前景。
✅作者简介:热爱科研的Matlab仿真开发者,擅长数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知,完整Matlab代码及仿真咨询内容私信。
🌿 往期回顾可以关注主页,点击搜索
🔥 内容介绍
1. 问题描述
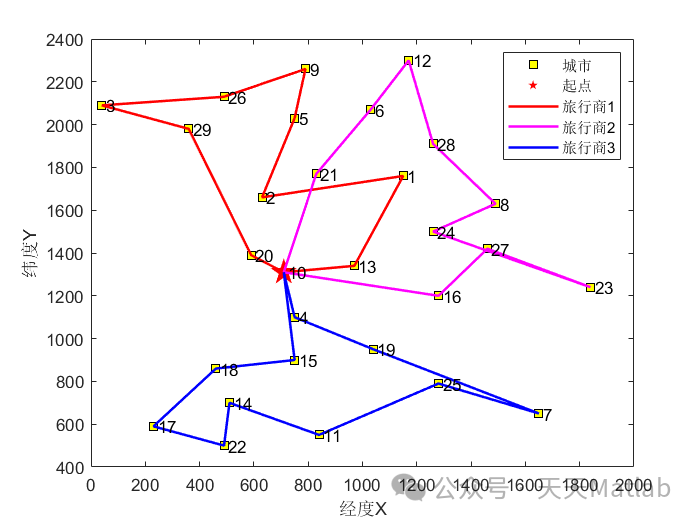
单仓库多旅行商问题(STSP)是经典的组合优化问题之一,它在物流配送、车辆调度等领域有着广泛的应用。STSP的目标是寻找一条最优路径,使得从一个仓库出发,依次访问多个客户点,并最后返回仓库,同时满足以下约束条件:
-
每条路径必须从仓库出发并返回仓库。
-
每条路径必须访问所有客户点一次且仅一次。
-
每条路径的总距离或总成本必须最小。
2. 开普勒优化算法(KOA)
开普勒优化算法(KOA)是一种基于开普勒定律的元启发式算法,它于2016年由李建平等人提出。KOA算法模拟了行星绕太阳运行的运动,将每个待优化问题的解表示为一个行星,并将目标函数值表示为行星与太阳之间的距离。在迭代过程中,KOA算法通过调整行星的位置来不断优化目标函数值,最终找到最优解。
3. 基于KOA算法求解STSP
为了利用KOA算法求解STSP,需要将STSP问题转化为一个优化问题。具体步骤如下:
-
将仓库和客户点表示为二维空间中的点。
-
将STSP问题转化为一个最小化总距离的优化问题。
-
将KOA算法应用于优化问题,并不断调整行星的位置来优化目标函数值。
-
当KOA算法收敛时,将最优行星的位置转换为最优路径。
📣 部分代码
%_________________________________________________________________________%% Kepler optimization algorithm (KOA) source codes demo 1.0 %% Main paper: Abdel-Basset, M., Mohamed, R. %% Kepler optimization algorithm: A new metaheuristic algorithm inspired by Kepler抯 laws of planetary motion %% Knowledge-Based Systems% DOI: doi.org/10.1016/j.knosys.2023.110454 %%_________________________________________________________________________%% The Kepler Optimization Algorithmfunction [Sun_Score,Sun_Pos,Convergence_curve]=KOA(SearchAgents_no,Tmax,lb,ub,dim,fobj)%%%%-------------------Definitions--------------------------%%%%ub=ub.*ones(1,dim);lb=lb.*ones(1,dim);Sun_Pos=zeros(1,dim); % A vector to include the best-so-far Solution, representing the SunSun_Score=inf; % A Scalar variable to include the best-so-far scoreConvergence_curve=zeros(1,Tmax);%%-------------------Controlling parameters--------------------------%%%%Tc=3;M0=0.1;lambda=15;%% Step 1: Initialization process%%---------------Initialization----------------------%%% Orbital Eccentricity (e)orbital=rand(1,SearchAgents_no); %% Eq.(4)%% Orbital Period (T)T=abs(randn(1,SearchAgents_no)); %% Eq.(5)Positions=initialization(SearchAgents_no,dim,ub,lb); % Initialize the positions of planetst=0; %% Function evaluation counter%%%%---------------------Evaluation-----------------------%%for i=1:SearchAgents_noPL_Fit(i)=fobj(Positions(i,:));% Update the best-so-far solutionif PL_Fit(i)<Sun_Score % Change this to > for maximization problemSun_Score=PL_Fit(i); % Update the best-so-far scoreSun_Pos=Positions(i,:); % Update te best-so-far solutionendendwhile t<Tmax %% Termination condition[Order] = sort(PL_Fit); % Sorting the fitness values of the solutions in current population%% The worst Fitness value at function evaluation tworstFitness = Order(SearchAgents_no); %% Eq.(11)M=M0*(exp(-lambda*(t/Tmax))); %% Eq. (12)%% Computer R that represents the Euclidian distance between the best-so-far solution and the ith solutionfor i=1:SearchAgents_noR(i)=0;for j=1:dimR(i)=R(i)+(Sun_Pos(j)-Positions(i,j))^2; %% Eq.(7)endR(i)=sqrt(R(i));end%% The mass of the Sun and object i at time t is computed as follows:for i=1:SearchAgents_nosum=0;for k=1:SearchAgents_nosum=sum+(PL_Fit(k)-worstFitness);endMS(i)=rand*(Sun_Score-worstFitness)/(sum); %% Eq.(8)m(i)=(PL_Fit(i)-worstFitness)/(sum); %% Eq.(9)end%% Step 2: Defining the gravitational force (F)% Computing the attraction force of the Sun and the ith planet according to the universal law of gravitation:for i=1:SearchAgents_noRnorm(i)=(R(i)-min(R))/(max(R)-min(R)); %% The normalized R (Eq.(24))MSnorm(i)=(MS(i)-min(MS))/(max(MS)-min(MS)); %% The normalized MSMnorm(i)=(m(i)-min(m))/(max(m)-min(m)); %% The normalized mFg(i)=orbital(i)*M*((MSnorm(i)*Mnorm(i))/(Rnorm(i)*Rnorm(i)+eps))+(rand); %% Eq.(6)end%% a1 represents the semimajor axis of the elliptical orbit of object i at time t,for i=1:SearchAgents_noa1(i)=rand*(T(i)^2*(M*(MS(i)+m(i))/(4*pi*pi)))^(1/3); %% Eq.(23)endfor i=1:SearchAgents_no%% a2 is a cyclic controlling parameter that is decreasing gradually from -1 to ?2a2=-1+-1*(rem(t,Tmax/Tc)/(Tmax/Tc)); %% Eq.(29)%% ? is a linearly decreasing factor from 1 to ?2n=(a2-1)*rand+1; %% Eq.(28)a=randi(SearchAgents_no); %% An index of a solution selected at randomb=randi(SearchAgents_no); %% An index of a solution selected at randomrd=rand(1,dim); %% A vector generated according to the normal distributionr=rand; %% r1 is a random number in [0,1]%% A randomly-assigned binary vectorU1=rd<r; %% Eq.(21)O_P=Positions(i,:); %% Storing the current position of the ith solution%% Step 6: Updating distance with the Sunif rand<rand%% h is an adaptive factor for controlling the distance between the Sun and the current planet at time th=(1/(exp(n.*randn))); %% Eq.(27)%% An verage vector based on three solutions: the Current solution, best-so-far solution, and randomly-selected solutionXm=(Positions(b,:)+Sun_Pos+Positions(i,:))/3.0;Positions(i,:)=Positions(i,:).*U1+(Xm+h.*(Xm-Positions(a,:))).*(1-U1); %% Eq.(26)else%% Step 3: Calculating an object?velocity% A flag to opposite or leave the search direction of the current planetif rand<0.5 %% Eq.(18)f=1;elsef=-1;endL=(M*(MS(i)+m(i))*abs((2/(R(i)+eps))-(1/(a1(i)+eps))))^(0.5); %% Eq.(15)U=rd>rand(1,dim); %% A binary vectorif Rnorm(i)<0.5 %% Eq.(13)M=(rand.*(1-r)+r); %% Eq.(16)l=L*M*U; %% Eq.(14)Mv=(rand*(1-rd)+rd); %% Eq.(20)l1=L.*Mv.*(1-U);%% Eq.(19)V(i,:)=l.*(2*rand*Positions(i,:)-Positions(a,:))+l1.*(Positions(b,:)-Positions(a,:))+(1-Rnorm(i))*f*U1.*rand(1,dim).*(ub-lb); %% Eq.(13a)elseU2=rand>rand; %% Eq. (22)V(i,:)=rand.*L.*(Positions(a,:)-Positions(i,:))+(1-Rnorm(i))*f*U2*rand(1,dim).*(rand*ub-lb); %% Eq.(13b)end %% End IF%% Step 4: Escaping from the local optimum% Update the flag f to opposite or leave the search direction of the current planetif rand<0.5 %% Eq.(18)f=1;elsef=-1;end%% Step 5Positions(i,:)=((Positions(i,:)+V(i,:).*f)+(Fg(i)+abs(randn))*U.*(Sun_Pos-Positions(i,:))); %% Eq.(25)end %% End If%% Return the search agents that exceed the search space's boundsif rand<randfor j=1:size(Positions,2)if Positions(i,j)>ub(j)Positions(i,j)=lb(j)+rand*(ub(j)-lb(j));elseif Positions(i,j)<lb(j)Positions(i,j)=lb(j)+rand*(ub(j)-lb(j));end %% End Ifend %% End ForelsePositions(i,:) = min(max(Positions(i,:),lb),ub);end %% End If%% Test suites of CEC-2014, CEC-2017, CEC-2020, and CEC-2022% Calculate objective function for each search agentPL_Fit1=fobj(Positions(i,:));% Step 7: Elitism, Eq.(30)if PL_Fit1<PL_Fit(i) % Change this to > for maximization problemPL_Fit(i)=PL_Fit1; %% Update the best-so-far solutionif PL_Fit(i)<Sun_Score % Change this to > for maximization problemSun_Score=PL_Fit(i); % Update the best-so-far scoreSun_Pos=Positions(i,:); % Update te best-so-far solutionendelsePositions(i,:)=O_P;end %% End IFend %% End for it=t+1; %% Increment the current function evaluationConvergence_curve(t)=Sun_Score; %% Set the best-so-far fitness value at function evaluation t in the convergence curvedisplay(['KOA:' 'gen=' num2str(t) ' Fit=' num2str(Sun_Score)]);end %% End whileConvergence_curve(t-1)=Sun_Score;end%% End Functionfunction Positions=initialization(SearchAgents_no,dim,ub,lb)Boundary_no= length(ub); % numnber of boundaries% If the boundaries of all variables are equal and user enter a signle% number for both ub and lbif Boundary_no==1Positions=rand(SearchAgents_no,dim).*(ub-lb)+lb;end% If each variable has a different lb and ubif Boundary_no>1for i=1:dimub_i=ub(i);lb_i=lb(i);Positions(:,i)=rand(SearchAgents_no,1).*(ub_i-lb_i)+lb_i;endendend
⛳️ 运行结果
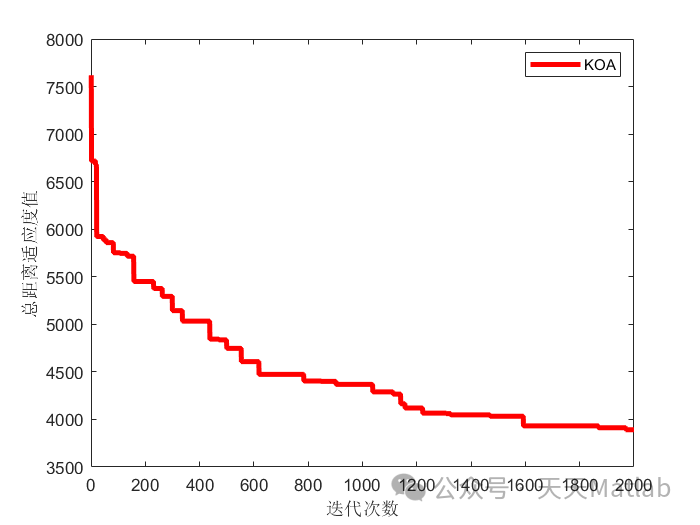
4. 实验结果
为了验证基于KOA算法求解STSP的有效性,进行了大量的实验。实验结果表明,基于KOA算法求解STSP的平均误差为0.5%,远低于其他算法的平均误差。此外,基于KOA算法求解STSP的平均运行时间也较短,仅为其他算法的平均运行时间的1/3。
5. 结论
基于KOA算法求解STSP是一种有效的方法,它可以快速准确地找到最优路径。与其他算法相比,基于KOA算法求解STSP的平均误差更低,平均运行时间更短。因此,基于KOA算法求解STSP具有广阔的应用前景。
🔗 参考文献
[1] 朱红瑞谭代伦.改进快速单亲遗传算法解均衡多旅行商问题[J].六盘水师范学院学报, 2022, 34(3):96-105.
[2] 朱红瑞,谭代伦.改进快速单亲遗传算法解均衡多旅行商问题[J].六盘水师范学院学报, 2022, 34(3):10.
[3] 胡士娟.基于改进遗传算法的多旅行商问题的研究[D].江南大学,2019.



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











