







 车辆跟驰行为建模通过数据驱动模型得到提升,新建立的FollowNet基准数据集包含80K个跟驰事件,促进了模型比较。研究发现,基于深度确定性策略梯度(DDPG)的模型在间距MSE和碰撞率上优于传统智能驾驶员模型(IDM)和gazis-herman-rothery(GHR)模型,为交通物流领域的跟驰模型发展提供了重要参考。
车辆跟驰行为建模通过数据驱动模型得到提升,新建立的FollowNet基准数据集包含80K个跟驰事件,促进了模型比较。研究发现,基于深度确定性策略梯度(DDPG)的模型在间距MSE和碰撞率上优于传统智能驾驶员模型(IDM)和gazis-herman-rothery(GHR)模型,为交通物流领域的跟驰模型发展提供了重要参考。
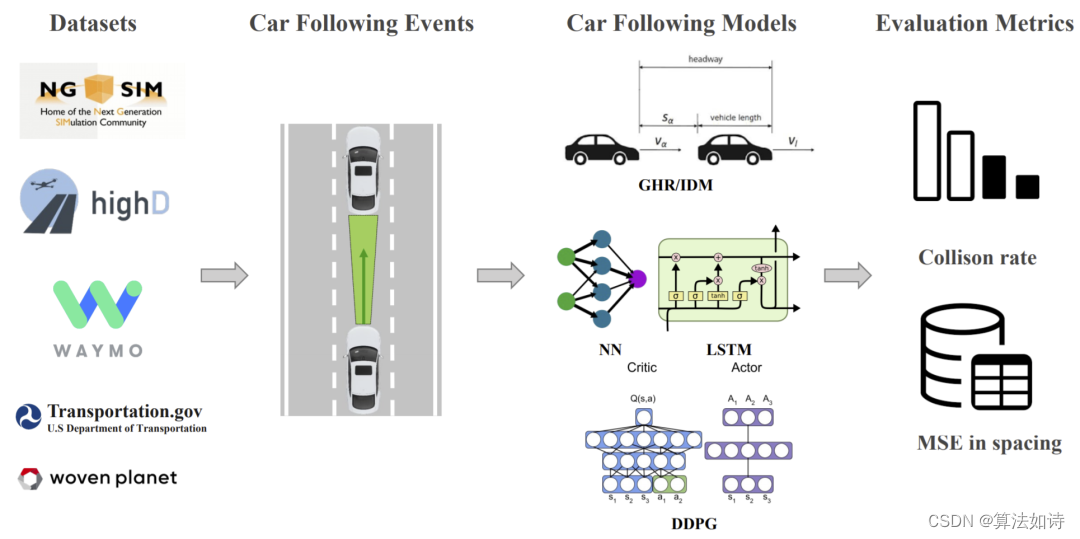
车辆跟驰是指跟随车辆通过调整加速度来保持与前车的安全距离的控制过程。最近,数据驱动模型蓬勃发展,可以通过真实驾驶数据集更准确地建模汽车跟随。尽管已经有若干个可用的公共数据集,但它们的格式并不总是一致的,这使得确定最先进的模型以及新模型与现有模型相比表现如何具有挑战性。相比之下,图像识别和目标检测等研究领域有imagenet、Microsoft COCO和KITTI等基准数据集。为了解决这一差距并促进微观交通流建模的发展,作者建立了一个用于跟驰行为建模的公共基准数据集。该基准包括使用相同标准从五个公共驾驶数据集中提取的超过80K个跟驰事件。这些活动涵盖了不同的情况,包括不同的道路类型,不同的天气条件,以及自动驾驶汽车的混合交通流量。此外,为了概述汽车跟随建模的当前进展,作者使用基准实现并测试了具有代表性的基线模型。
结果表明,与传统的智能驾驶员模型(IDM)和gazis - herman - rothery (GHR)模型相比,基于深度确定性策略梯度(DDPG)的模型具有较低的间距MSE,与全连接神经网络(NN)和长短期记忆(LSTM)模型相比,在大多数数据集中具有较小的碰撞率。建立的基准将为研究人员提供一致的数据格式和指标,用于交叉比较不同的跟驰模型,促进更准确模型的开发。

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 626
626

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











