









1、首先,要想实现要想实现Ps2手柄控制舵机任意角度控制,必须要了解怎样实现Ps2手柄与arduino nano的通信和解码以及舵机的工作原理,这个比较简单,大家去自行了解一下就OK了。
2、舵机的工作原理是:向舵机发送周期为20ms的脉冲信号,当这段脉冲中高电位占比为0.5ms的时候,舵机会转至0度,当高电位占比为2.5ms的时候,舵机会转至180度。(这部分做一下简单了解,在程序中并未体现)。
3、本次采用arduino的库函数文件Servo.h。可以轻松地实现舵机旋转任意角度。具体功能在程序中也有标注出来,比较清晰,读者可以自行观看。(老牛的程序是可以直接COPY过去使用的,没有的库文件,老牛已经放在百度网盘,建议大家自己下载一下)。链接:https://pan.baidu.com/s/1XTgef2rl0iQFTJU2PuGJ5A
提取码:66ln
链接:https://pan.baidu.com/s/1Fozo8eEGHAFu-ZLSgziuKg
提取码:66ln
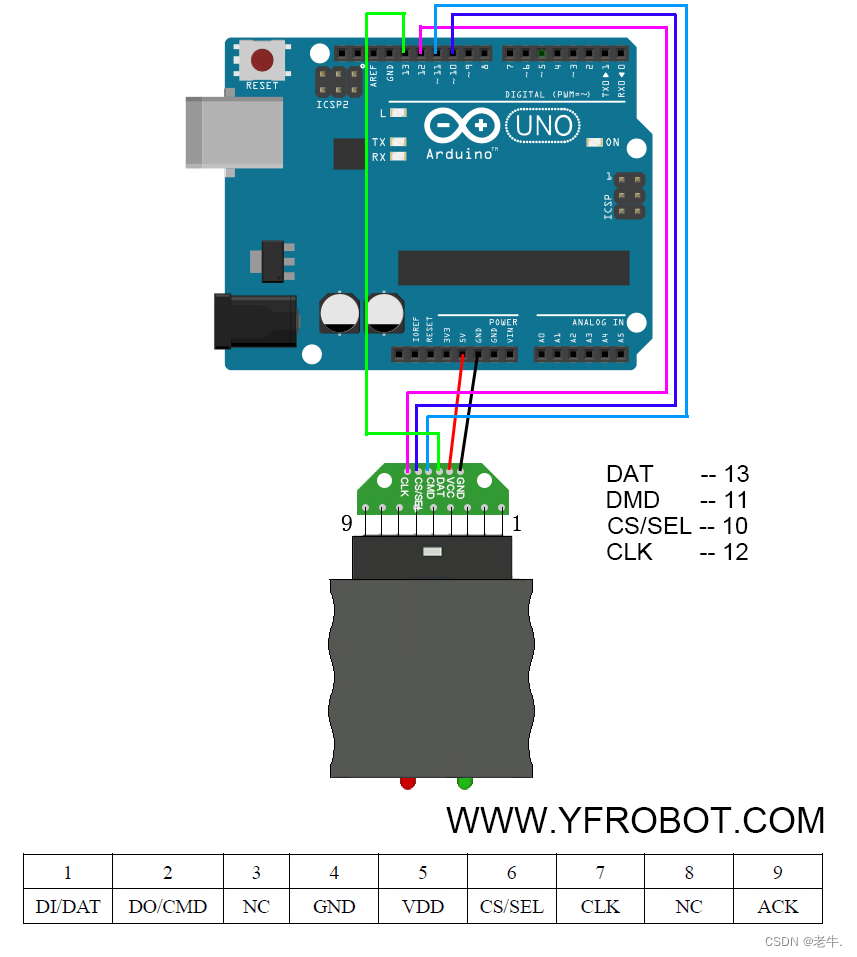
4、基本原理很简单,废话不多说,上连接图。
5、代码。
/*****************************************
This program is just belong to Niu Lao.
Don't spread it on website casually.
Auther: Niu Lao
Function:1、实现Ps2手柄与arduino的通信和数据解析
2、实现舵机任意角度的旋转控制
******************************************/
#include <PS2X_lib.h>
#include <Servo.h>
#define PS2_DAT 13
#define PS2_CMD 11
#define PS2_SEL 10
#define PS2_CLK 12
#define pressures false
#define rumble false
int error = 0;
//int speed = 0;
byte type = 0;
byte vibrate = 0;
PS2X ps2x;
void (* resetFunc) (void) = 0;
//以上为手柄配置
int sck = 9;
Servo duoji;//伺服舵机
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
pinMode(sck, OUTPUT);
duoji.attach(9);//舵机连接9号引脚
type = ps2x.readType();
error = ps2x.config_gamepad(PS2_CLK, PS2_CMD, PS2_SEL, PS2_DAT, pressures, rumble);
delay(300);
}
void loop() {
// put your main code here, to run repeatedly:
if (error == 1) {
resetFunc();
}
if (type == 2) {
ps2x.read_gamepad();
}
else {
ps2x.read_gamepad(false, vibrate);
vibrate = ps2x.Analog(PSAB_CROSS);
int LY1 = ps2x.Analog(PSS_LY);
int LX1 = ps2x.Analog(PSS_LX);
int RY1 = ps2x.Analog(PSS_RY);
int RX1 = ps2x.Analog(PSS_RX);
int ly = map(LY1, 0, 255, 0, 170);
int lx = map(LX1, 0, 255, 0, 170);
int ry = map(RY1, 0, 255, 0, 170);
int rx = map(RX1, 0, 255, 0, 170);
Serial.print(LY1);
Serial.print(',');
Serial.print(LX1);
Serial.print(',');
Serial.print(RY1);
Serial.print(',');
Serial.print(RX1);
Serial.print('\n');
if (ps2x.Button(PSB_L1) || ps2x.Button(PSB_R1)) {
if (ps2x.Button(PSB_GREEN)) {
duoji.write(0);
delay(700);
}
if (ps2x.Button(PSB_PINK)) {
duoji.write(30);
delay(700);
}
if (ps2x.Button(PSB_BLUE)) {
duoji.write(60);
delay(700);
}
if (ps2x.Button(PSB_RED)) {
duoji.write(90);
delay(700);
}
}
else {
digitalWrite(sck, LOW); //将舵机输出引脚拉低
delay(50);
}
if (ps2x.Button(PSB_L2) || ps2x.Button(PSB_R2)) {
duoji.write(ly);
delay(700);
}
else {
digitalWrite(sck, LOW); //将舵机输出引脚拉低
delay(50);
}
}
}
6、简单总结一下,本次介绍了arduino实现Ps2手柄控制舵机任意角度。需要掌握的部分有:map(Value,Min1,Max1,Min2,Max2)函数,实现不同限定变化范围的转换、调用库文件函数(本次基本是库文件程序作用)、基础电路知识、基础C语言知识、Servo库函数的调用(程序中标注比较详细,就不再赘述)。老牛也会努力让更多小白能够触摸到电路控制的乐趣,后续还会继续更新一些遥控小车,语音遥控等等一些有趣的开发项目。
老牛















 1562
1562











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









