






 本文介绍了在学习智能小车自动驾驶过程中,使用JetsonNano和STM32板进行串口通信的步骤。通过TTL转USB接口连接两者,使用PC串口调试助手和Ubuntu上的Python脚本来实现数据的发送与接收。在Ubuntu上安装驱动并检查串口状态,确保波特率等配置一致,从而实现两端的数据交互。
本文介绍了在学习智能小车自动驾驶过程中,使用JetsonNano和STM32板进行串口通信的步骤。通过TTL转USB接口连接两者,使用PC串口调试助手和Ubuntu上的Python脚本来实现数据的发送与接收。在Ubuntu上安装驱动并检查串口状态,确保波特率等配置一致,从而实现两端的数据交互。
目前正在学习智能小车自动驾驶方面的知识,小车搭载的是jetsonnano与stm32板,前期调试主要在PC与jetsonnano之间进行,因为自己也是初步接触,所以写一篇博客记录自己遇到的问题,也希望能给其他人一点帮助。
一:使用工具
jesonnano开发版,两个TTL转USB接口,杜邦线,PC串口调试助手
二:准备工作
将两个TTL转USB用杜邦线连接,注意RXD连TXD,TXD连RXD即可,GND连接可提高稳定性,如果串口传输出现数据错误,可试试连接GND引脚。
PC端直接在Microsoft Store中搜索串口调试助手下载即可,免费版就足够入门使用了,同时下载好相应的驱动【设备管理器中打开端口,找到自己的串口,右键就能下载驱动】
jesonnano上搭载的ubuntu18.04系统,安装好驱动后,可以通过下述控制台命令查看串口是否正常打开【如果你的设备只连接一个串口,一般串口号默认为ttyUSB0,具体可根据自身实际情况更改】
ll /dev/ttyUSB0三:基础收发代码
先上ubuntu上的代码
import serial
# 打开串口,其中波特率设为9600,串口号为ttyUSB0,可根据实际情况修改
ser = serial.Serial('/dev/ttyUSB0', 9600, timeout=1)
# 发送数据
data = b'Hello, world!'
ser.write(data)
# 读取数据
data = ser.readline()
print(data)
# 关闭串口
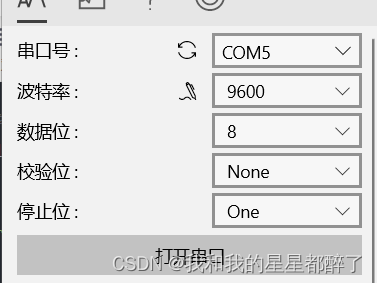
ser.close()PC端的串口助手记得将相关设置调整一致,并打开串口
之后ubuntu上运行python脚本,就基本完成了,PC的串口助手与jetsonnano的控制台上就会有相应的数据,完成√

















 1850
1850

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









