







本人水平有限,难免会有纰漏,如果发现哪里不对,望大家指出
1:理论推导
1-1:目的:将复杂的三相系统(在abc坐标系中)解耦成可以独立控制的两相系统,从而降低控制的复杂度。
1-2:推导过程:利用三角函数来实现三相坐标系(abc)到两相正交坐标系(αβ)
网上大多是用矩阵推导的,对新手可能不太好理解,下面我将用正交分解的方法推导
已知三相系统中的三相电流(Ia Ib Ic是幅值一样,频率一样,相位互差120度),且根据基尔霍夫电流定律,流入流出节点的电流代数和为0,Ia + Ib + Ic = 0
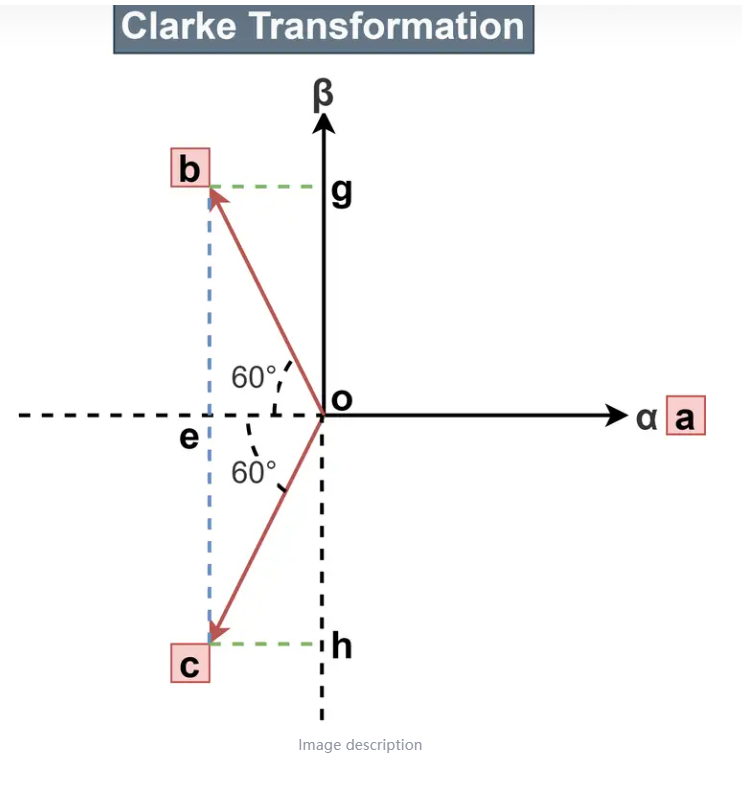
对于α轴,规定α为正方向,la与α轴重合,Ib,Ic与α轴负方向的夹角为60°,投影到上面的分量就是 Ib * cos60° 和 Ic * cos60°。所以Iα = Ia - cos60° * (Ic + Ib)。
对于β轴,以为Ia与β轴垂直(cos90°),所以在β轴不存在Ia的分量。只有Ib * cos30° 和** Ic * cos30°**,那个Iβ = cos30° * (Ib - Ic)
经过上面的操作 *Iα = Ia - 1/2 * (Ic + Ib) Iβ = sqrt(3) / 2 (Ib - Ic)
又因为 Ia + Ib + Ic = 0 所以将Ic = -(Ia + Ib带入得到)
Iα = 3 / 2 * Ia Iβ = sqrt(3) /2 * (Ia + 2 * Ib)
因为是基于等幅值的变换 所以 Iα 和 Iβ 要乘以一个系数 2/3。这个系数会在SVPWM中乘回来,不会对控制有什么影响,乘以这个系数是为了确保变换前后信号的幅值不变。
乘2/3后 :Iα = Ia Iβ = sqrt(3) /3 * (Ia + 2Ib)
以上就是Clark变换的理论部分,接下来simulink仿真!!!!
2:Simulink模型搭建
2-1:添加信号源
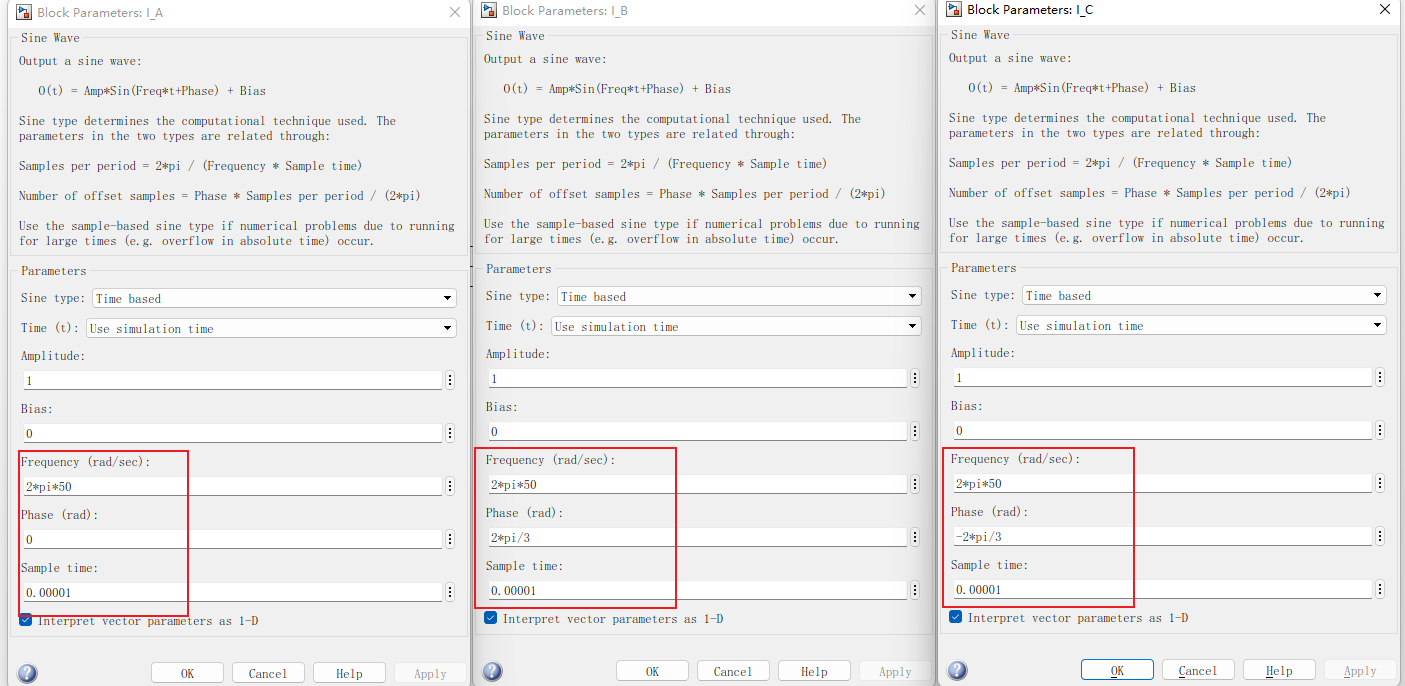
在simulink添加 Sine wave 具体信号源设置如下 ,要保持幅值(1A),频率一致(50HZ),且相位互差120°
添加个Scope模块查看产生的三相电流
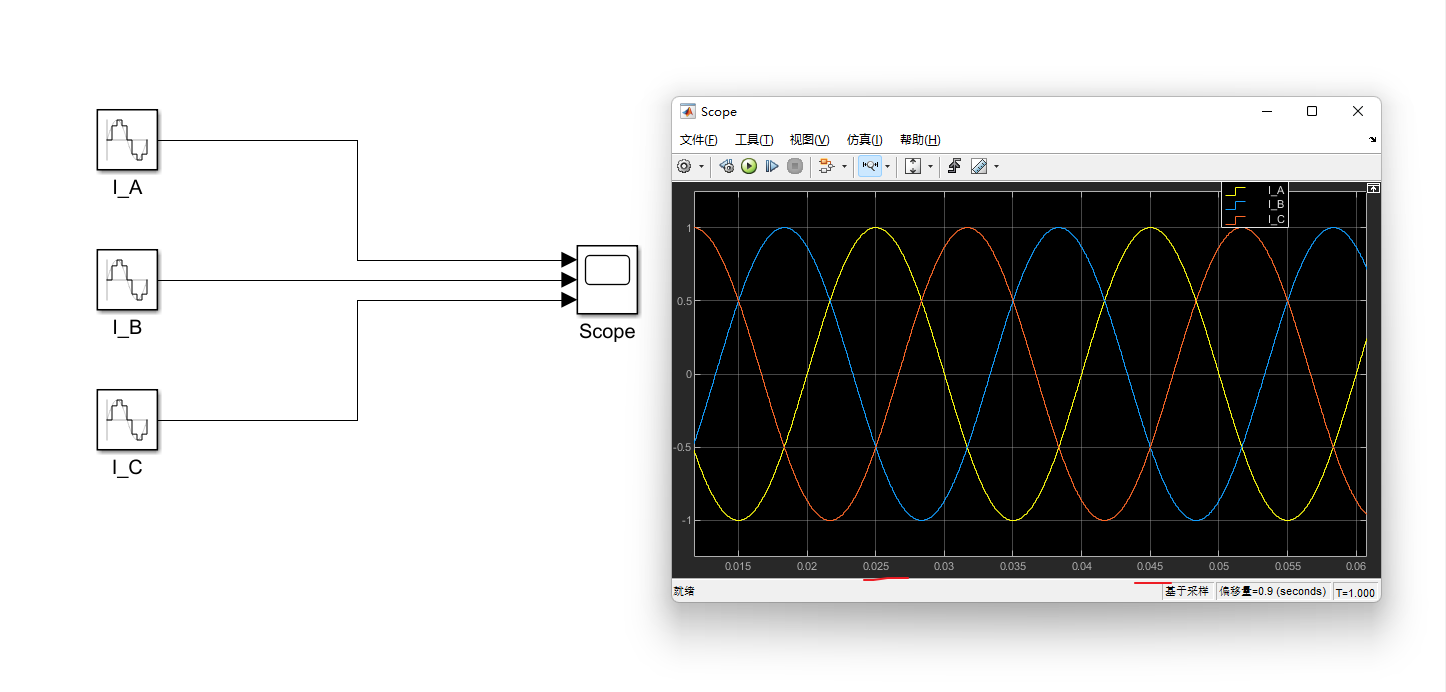
发出来的三相波形如上,验证了 幅值(1A),频率一致(50HZ),且相位互差120°的三相电流。
2-2:公式编写 + 验证
在simulink添加 MATLAB Function1 模块 双击 MATLAB Function1进入编辑器
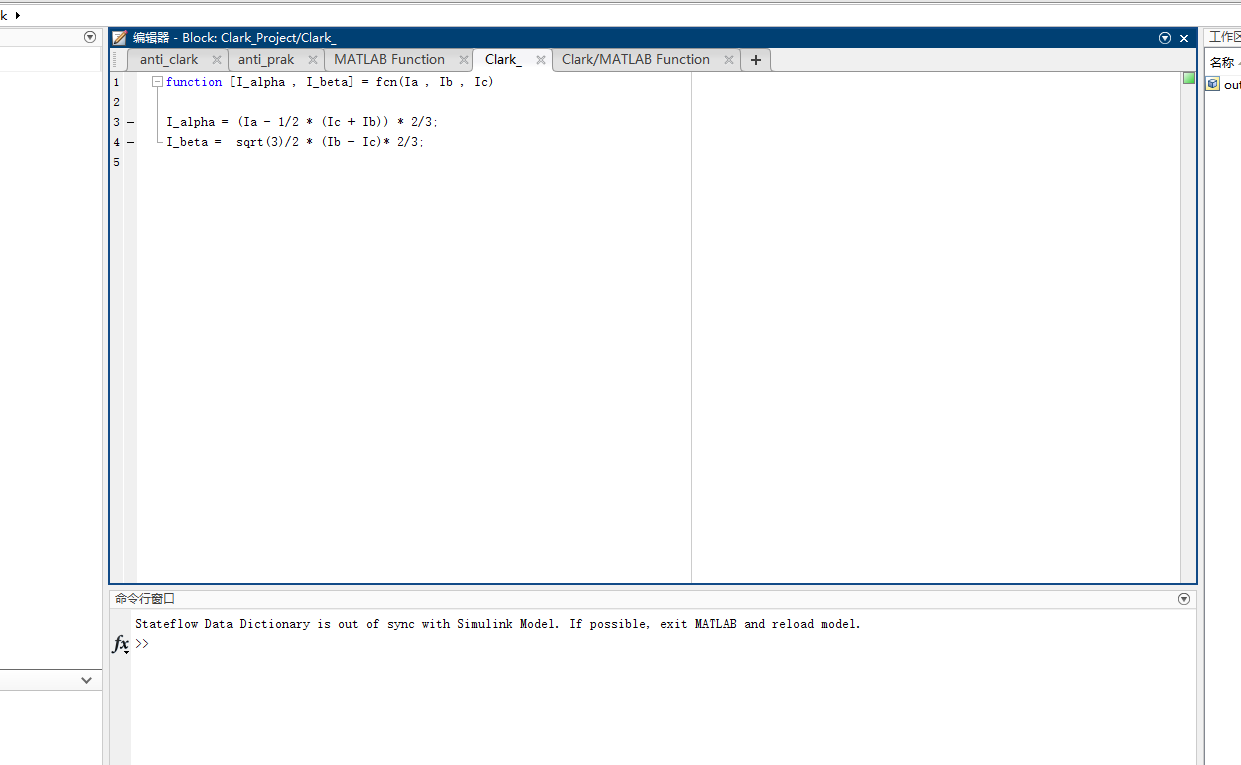
function [I_alpha , I_beta] = fcn(Ia , Ib , Ic)
I_alpha = (Ia - 1/2 * (Ic + Ib)) * 2/3;
I_beta = sqrt(3)/2 * (Ib - Ic)* 2/3;
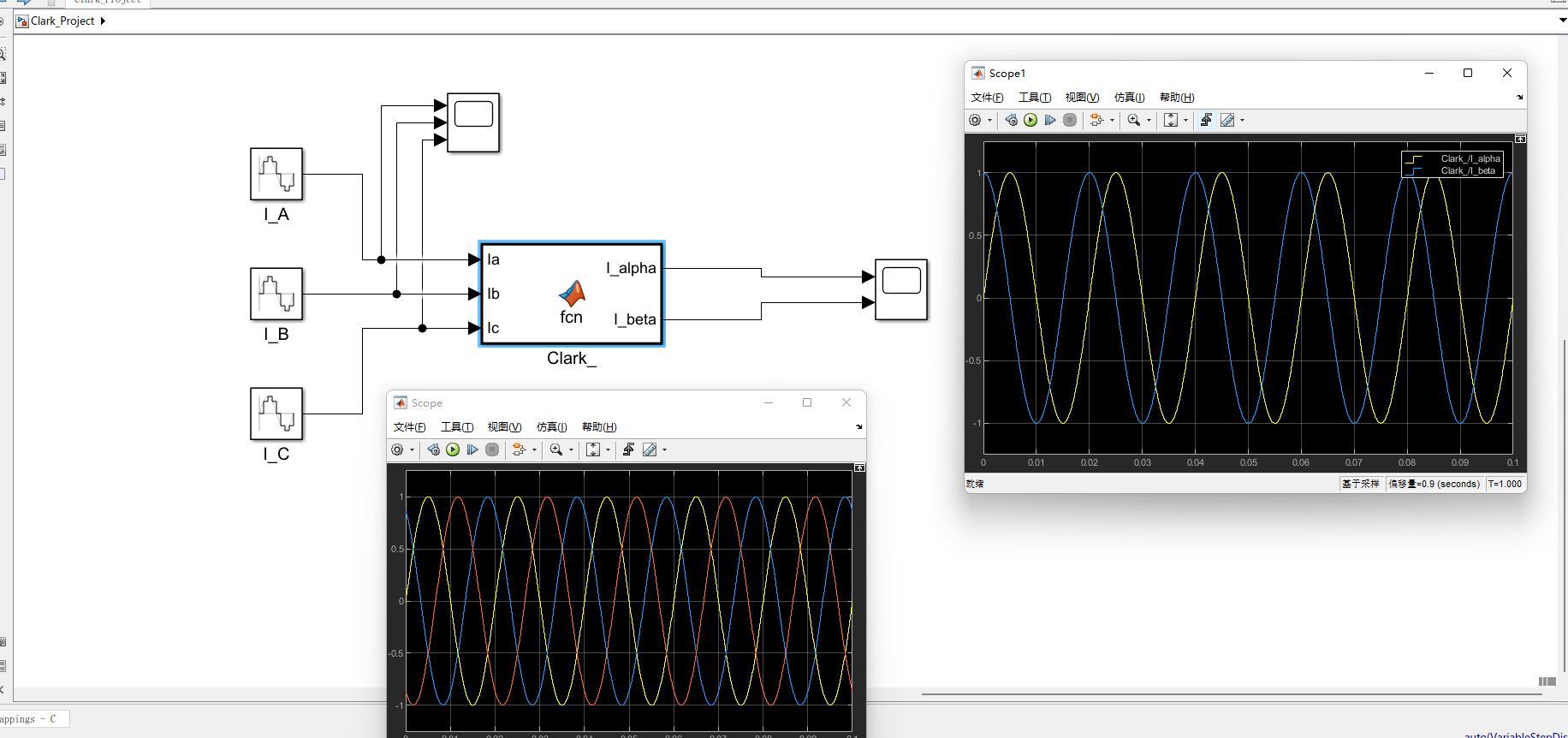
仿真后的波形就从最开始的三相变为两相,变换后的波形幅值和频率不变,相位互差90°。
如果把2/3这个系数去掉:
function [I_alpha , I_beta] = fcn(Ia , Ib , Ic)
I_alpha = (Ia - 1/2 * (Ic + Ib));
I_beta = sqrt(3)/2 * (Ib - Ic);
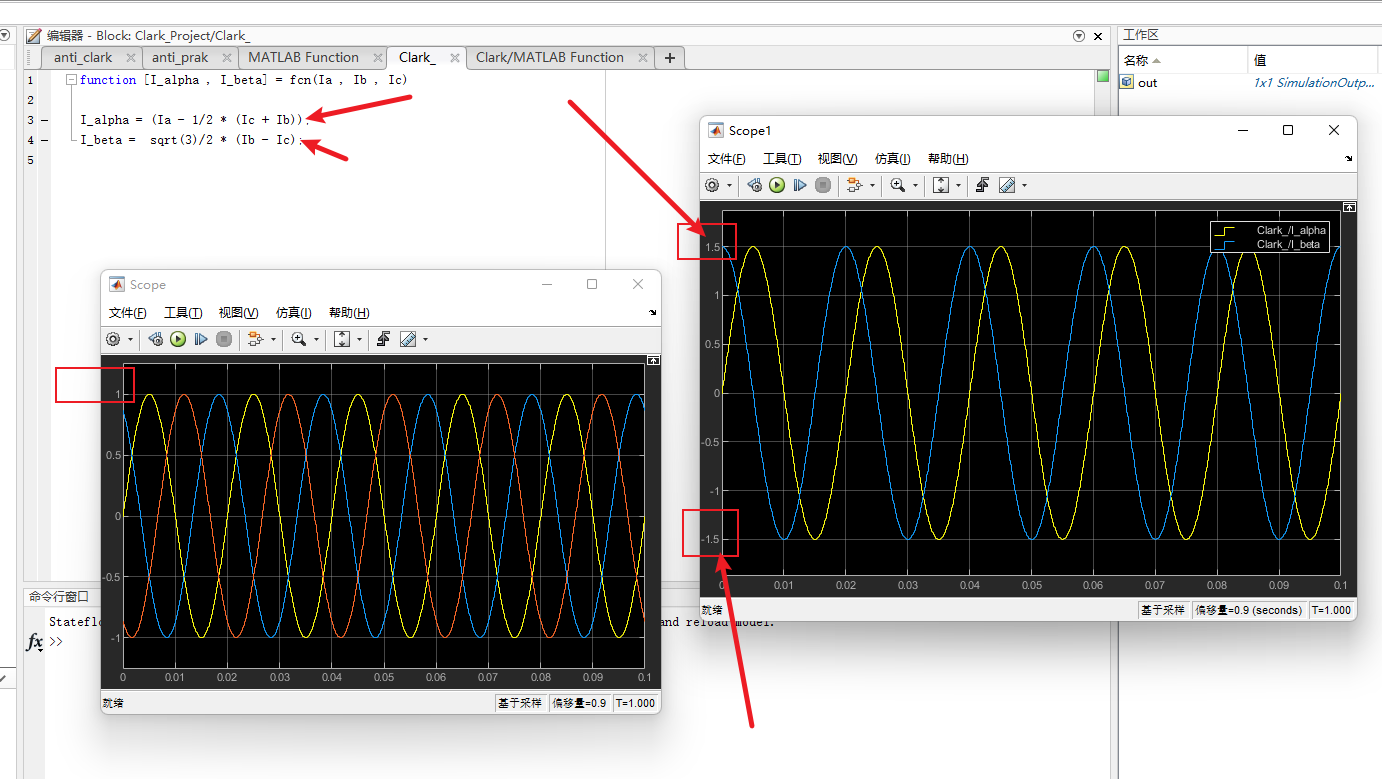
去掉系数后,经过Clark变换后的波形幅值就会变为原来的1.5倍,变换前后幅值发送了变化,就不是等幅值变化了。
这里clark变换的公式用了Ia Ib Ic三个变量
function [I_alpha , I_beta] = fcn(Ia , Ib , Ic)
I_alpha = (Ia - 1/2 * (Ic + Ib)) * 2/3;
I_beta = sqrt(3)/2 * (Ib - Ic)* 2/3;
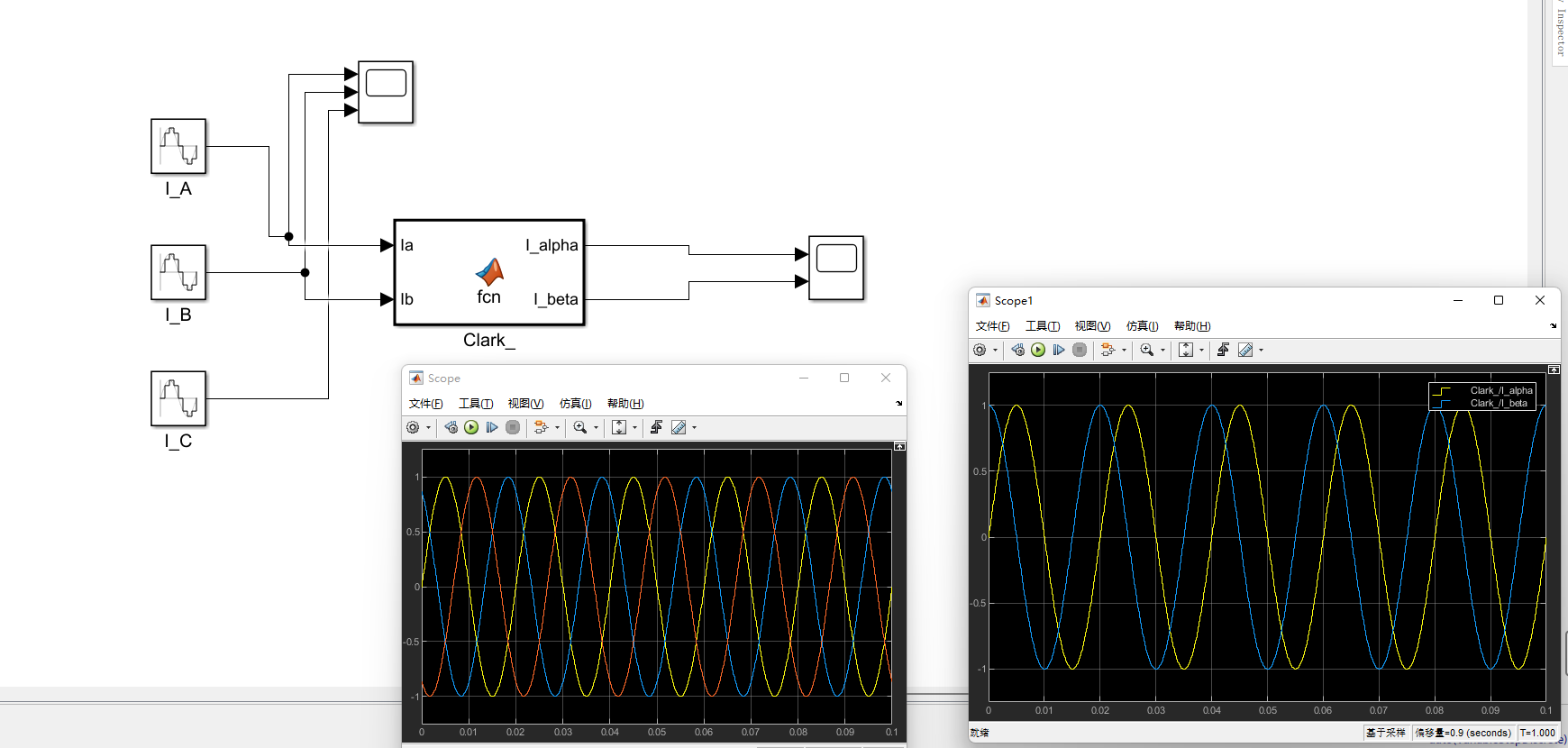
当然也可以采用上面推导的,都是一样的,就是把Ic = -(Ia + Ib)带入做抵消了
function [I_alpha , I_beta] = fcn(Ia , Ib)
I_alpha = Ia;
I_beta = sqrt(3) /3 * (Ia + 2*Ib);
至此,已经将Clark变换的推导和仿真验证完。
3:simulink工程
通过百度网盘分享的文件:clark.zip
链接:https://pan.baidu.com/s/1T0UJqrr9zMmU0iNpyyPRLA
提取码:lina

















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









