






 该代码实现了一个基于OpenCV的赛道检测系统,通过识别摄像头拍摄的多赛道,找出赛道边缘的横坐标,计算赛道的角度和中点坐标。主要功能包括寻找赛道轮廓、判断赛道间距、计算角度等,用于小车导航或自动驾驶场景。
该代码实现了一个基于OpenCV的赛道检测系统,通过识别摄像头拍摄的多赛道,找出赛道边缘的横坐标,计算赛道的角度和中点坐标。主要功能包括寻找赛道轮廓、判断赛道间距、计算角度等,用于小车导航或自动驾驶场景。
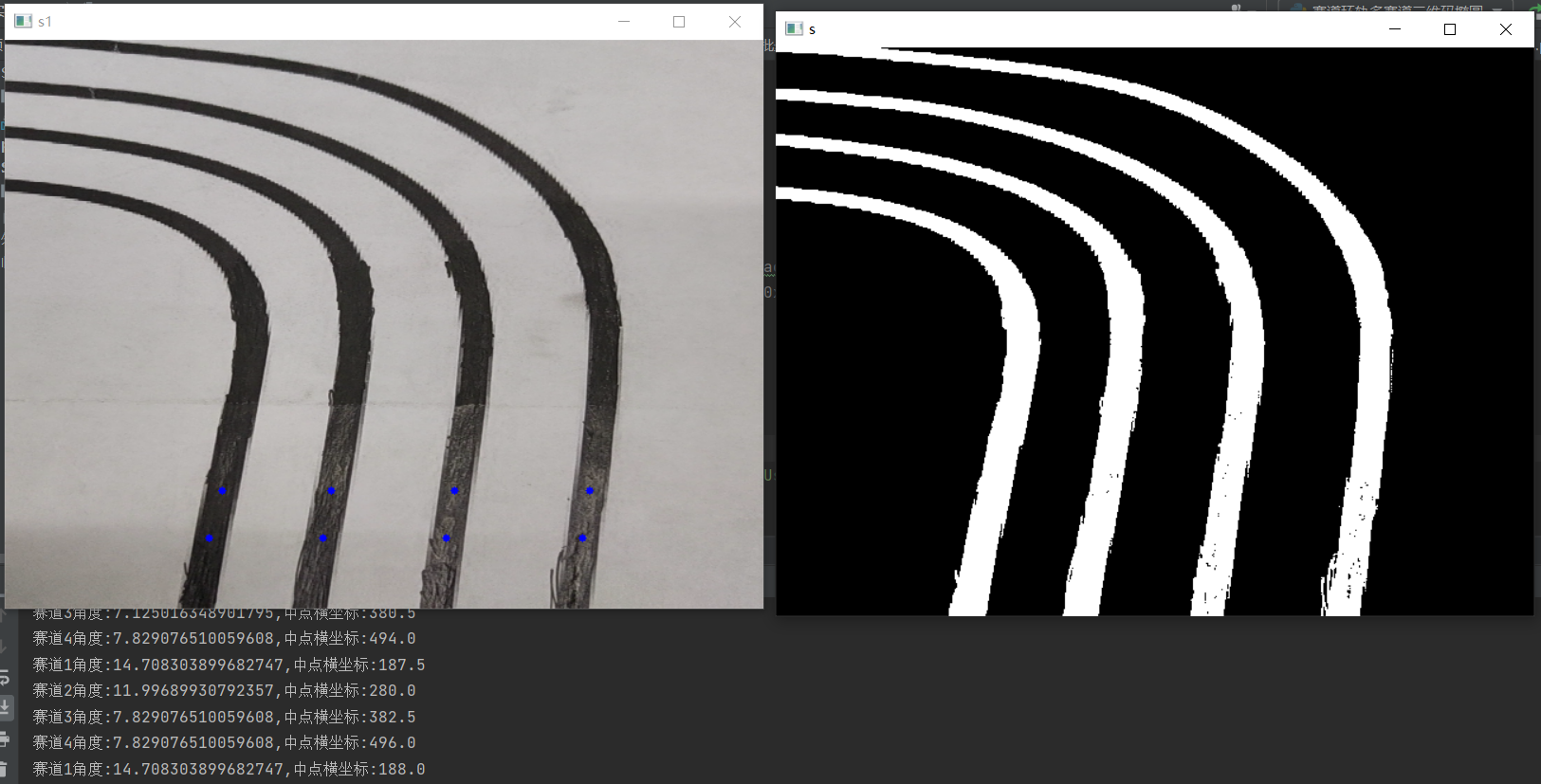
对摄像头拍摄到的多赛道进行检测并输出每条赛道的角度和中点坐标
运行结果:
下面的代码都有注释
下面函数是先对整个画面进行扫描,选取合适的色块并排列得到他们的面积和对应的索引
def FindRoad():#在这里面寻找面积最大的4目标没有意义,这里我们主要用到的是没有找到目标时返回的结果
area2 = []
b = []
Inf = -1
if len(contour1) >= 1: #找到目标至少为一
for i in range(len(contour1)):
if cv2.contourArea(contour1[i])>50:
area2.append(cv2.contourArea(contour1[i])) #将找到目标面积储存到area2
if len(area2)!=0:
for j in range(4): #只对前4个最大的面积进行操作
b.append(area2.index(max(area2))) #把目标按照面积大小从大到小存入列表b
area2[area2.index(max(area2))] = Inf #把刚刚存入列表的面积重新赋值为-1
else:
return 1
b.sort() #因为目标赛道检测到的面积有可能并不是按照顺序排列,所以在这里进行排列
return b
else:
return 1
设置判断赛道之间的间距,根据的是得到的赛道边缘的横坐标
def JudgeRoad(n):
s = []
try:
if n[2]-n[1]!=n[1]-n[0]:
s.append(n[1]) #列表s储存赛道边缘位置横坐标
else:
s.append(min(n))
try:
for i in range(len(n)):
if n[i + 1] - n[i] >= 50: #赛道的间距>50
s.append(n[i])
s.append(n[i + 1])
if i==len(n)-2:
if n[len(n)-1] - n[len(n)-2]<5:
s.append(n[len(n)-1])
break
else:
s.append(n[len(n)-2])
break
except:
pass
return s #返回赛道横坐标列表
except Exception :
return 1 #错误时一定要返回值
pass计算赛道的角度
def calc_angle(x1,y1,x2,y2):
angle = 0
k = 0
h = 0
y = y1-y2
x = x1-x2
if x == 0:
pass
else:
k = y/x
h = math.atan(k)
angle = 90 - abs(math.degrees(h))
return angle
完整代码:
import cv2
import numpy as np
import math
# cap = cv2.VideoCapture('C:/Users/K2095/Desktop/777.mp4')(这是我提前拍摄的模拟小车运行时摄像头的画面)
cap = cv2.VideoCapture(0)
def FindRoad():
area2 = []
b = []
Inf = -1
if len(contour1) >= 1: #找到目标至少为一
for i in range(len(contour1)):
if cv2.contourArea(contour1[i])>50:
area2.append(cv2.contourArea(contour1[i])) #将找到目标面积储存到area2
if len(area2)!=0:
for j in range(4): #只对前4个最大的面积进行操作
b.append(area2.index(max(area2))) #把目标按照面积大小从大到小存入列表b
area2[area2.index(max(area2))] = Inf #把刚刚存入列表的面积重新赋值为-1
else:
return 1
b.sort() #因为目标赛道检测到的面积有可能并不是按照顺序排列,所以在这里进行排列
return b
else:
return 1
def JudgeRoad(n):
s = []
try:
if n[2]-n[1]!=n[1]-n[0]:
s.append(n[1]) #列表s储存赛道边缘位置横坐标
else:
s.append(min(n))
try:
for i in range(len(n)):
if n[i + 1] - n[i] >= 50: #赛道的间距>50
s.append(n[i])
s.append(n[i + 1])
if i==len(n)-2:
if n[len(n)-1] - n[len(n)-2]<5:
s.append(n[len(n)-1])
break
else:
s.append(n[len(n)-2])
break
except:
pass
return s #返回赛道横坐标列表
except Exception :
return 1 #错误时一定要返回值
pass
def calc_angle(x1,y1,x2,y2):
angle = 0
k = 0
h = 0
y = y1-y2
x = x1-x2
if x == 0:
pass
else:
k = y/x
h = math.atan(k)
angle = 90 - abs(math.degrees(h))
return angle
while True:
success , img = cap.read()
img = cv2.resize(img, (640, 480))
imgHSV = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
lowerblack = np.array([0, 0, 0])
upperblack = np.array([255, 255, 120])
maskblack = cv2.inRange(imgHSV, lowerblack, upperblack)
contour1, hierarchy1 = cv2.findContours(maskblack, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
color = maskblack[380] #遍历掩膜第380行全部像素值
color2 = maskblack[420]
blackindex = np.where(color == 255) #储存像素为255的索引值
blackindex2 = np.where(color2 == 255)
npindex = np.array(blackindex)
npindex2 = np.array(blackindex2)
a = npindex.ravel() #将数组维度拉成一维数组
c = npindex2.ravel()
FindRoad()
o = FindRoad() #为赛道的索引
b = JudgeRoad(a) #赛道边缘的横坐标,为偶数个
b1 = [] #储存赛道中点横坐标
blackindex2 = JudgeRoad(c)
npindex2 = []
if o == 1:
print('未找到赛道')
pass
else:
if len(str(b)) <= 1: #b类型转换成字符串(防止报错)
b1.append(1)
else:
for i in range(len(b)):
if i % 2 == 0:
b1.append((b[i] + b[i + 1]) / 2)
else:
pass
if len(str(blackindex2)) <= 1:
npindex2.append(1)
else:
for i in range(len(blackindex2)):
if i % 2 == 0:
npindex2.append((blackindex2[i] + blackindex2[i + 1]) / 2)
else:
pass
if len(b1)==len(npindex2):
for i in range(len(b1)):
angle = calc_angle(npindex2[i], 420, b1[i], 380)
cv2.circle(img, (int(npindex2[i]), 420), 3, 255, -1)
cv2.circle(img, (int(b1[i]), 380), 3, 255, -1)
print('赛道{}角度:{},中点横坐标:{}'.format(i+1,angle,b1[i]))
else:
pass
cv2.imshow('s',maskblack)
cv2.imshow('s1', img)
if cv2.waitKey(30) & 0xFF == 27: # 按Esc关闭
break

















 4692
4692

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









