






ADC简介
1.ADC(Analog-Digital Converter)模拟-数字转换器
2.ADC可以将引脚上连续变化的模拟电压转换为内存中存储的数字变量,建立模拟电路到数字电路的桥梁
3.12位逐次逼近型ADC,1us转换时间
4.输入电压范围:0 ~ 3.3V,转换结果范围:0~4095
5.18个输入通道,可测量16个外部和2个内部信号源
6.规则组和注入组两个转换单元
7.模拟看门狗自动监测输入电压范围
STM32F103C8T6 ADC资源:ADC1、ADC2,10个外部输入通道
逐次逼近型ADC
ADC框图
ADC基本结构
输入通道

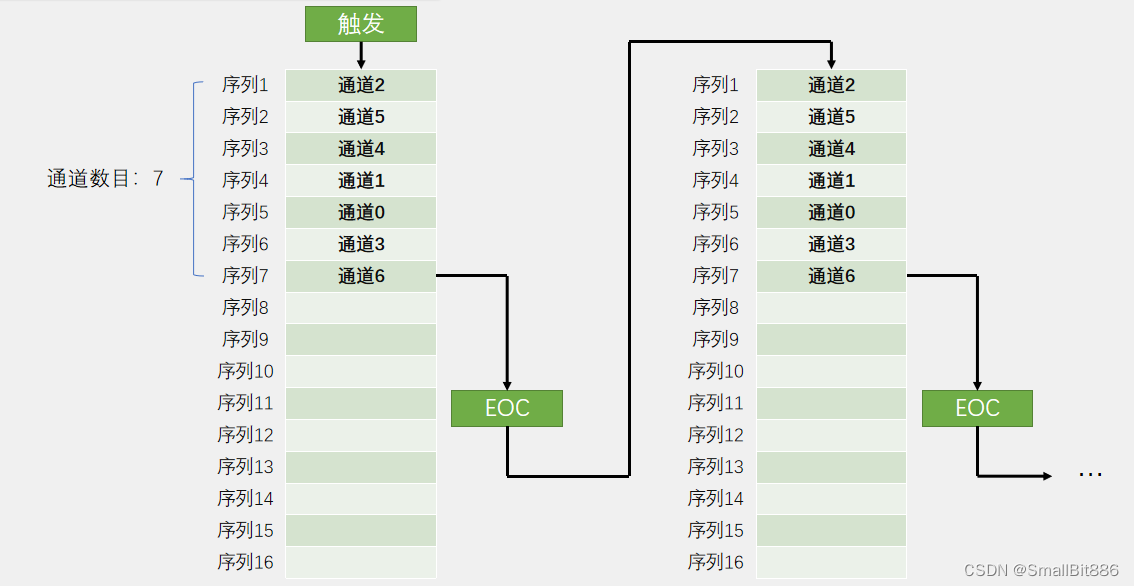
转换模式
1.单次转换,非扫描模式
2.连续转换,非扫描模式
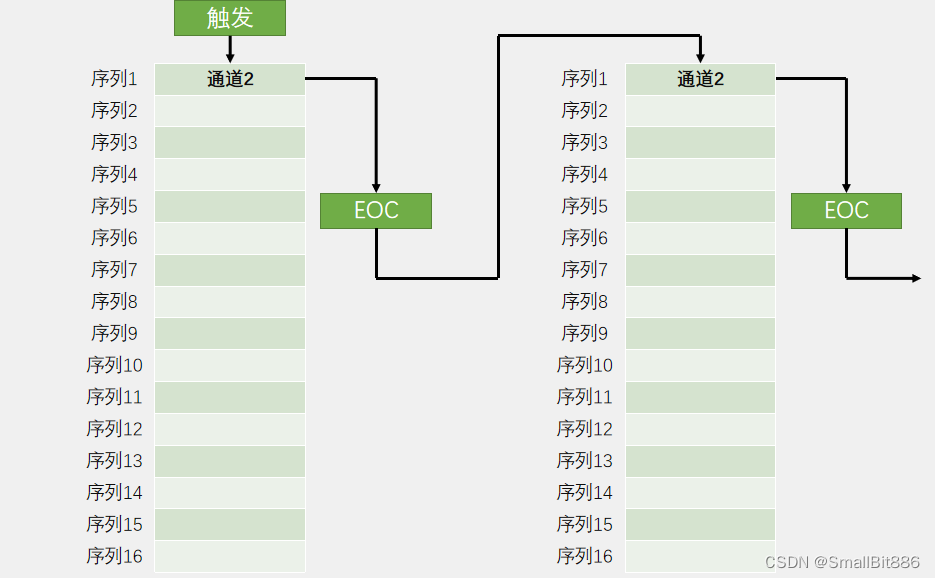
3.单次转换,扫描模式
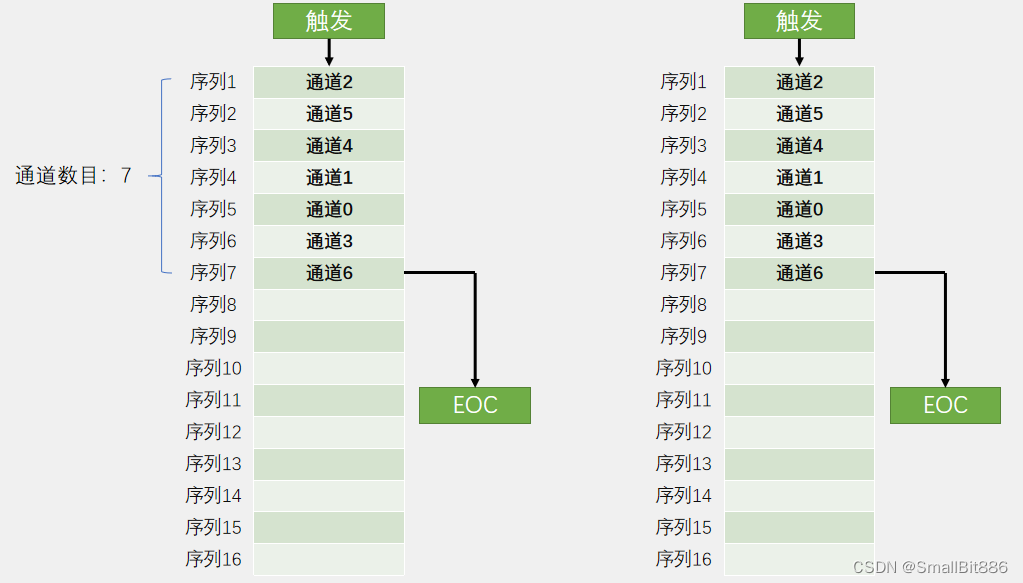
4.连续转换,扫描模式
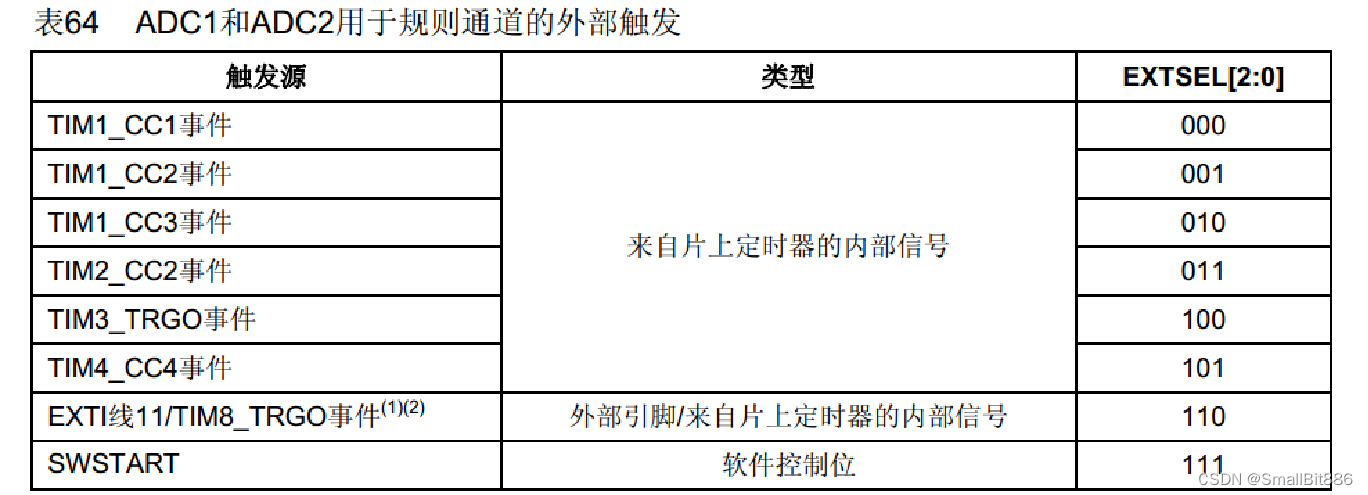
触发控制
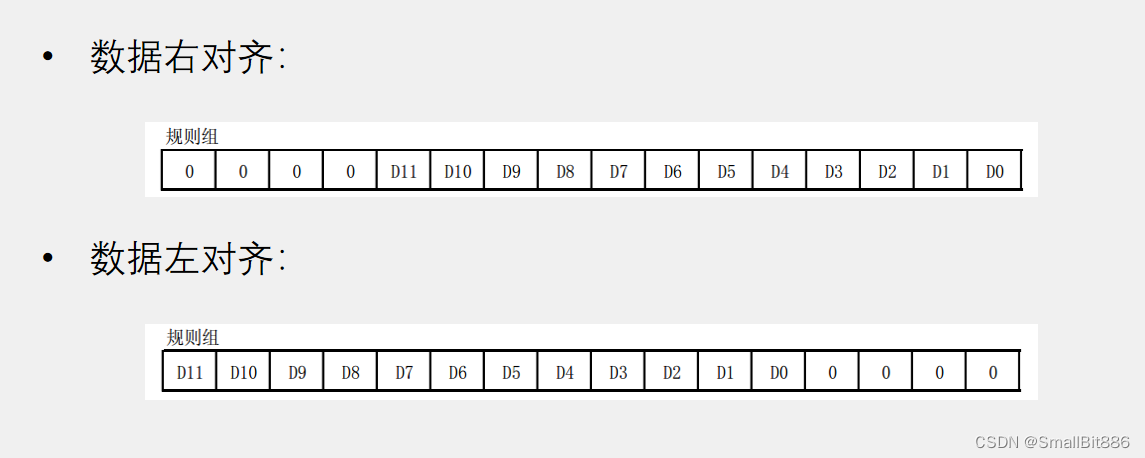
数据对齐
转换时间
AD转换的步骤:采样,保持,量化,编码
STM32 ADC的总转换时间为:
TCONV = 采样时间 + 12.5个ADC周期
例如:当ADCCLK=14MHz,采样时间为1.5个ADC周期
TCONV = 1.5 + 12.5 = 14个ADC周期 = 1μs
校准
ADC有一个内置自校准模式。校准可大幅减小因内部电容器组的变化而造成的准精度误差。校准期间,在每个电容器上都会计算出一个误差修正码(数字值),这个码用于消除在随后的转换中每个电容器上产生的误差
建议在每次上电后执行一次校准
启动校准前, ADC必须处于关电状态超过至少两个ADC时钟周期
ADC驱动代码
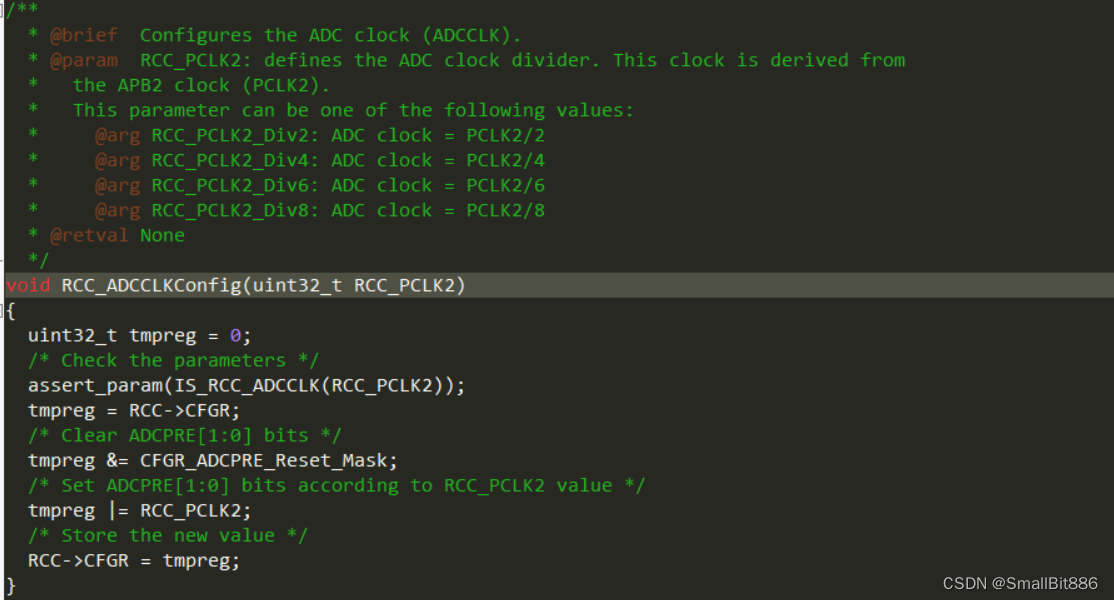
首先将配置ADCCLK分频器
注意:这个库函数在RCC.H文件里
可以对APB2总线72MHZ时钟选择2/4/6/8分频,输入到ADCCLK
接下来看ADC.H的相关库函数
void ADC_DeInit(ADC_TypeDef* ADCx);
//恢复缺省值配置
void ADC_Init(ADC_TypeDef* ADCx, ADC_InitTypeDef* ADC_InitStruct);
//初始化
void ADC_StructInit(ADC_InitTypeDef* ADC_InitStruct);
//结构体初始化
void ADC_Cmd(ADC_TypeDef* ADCx, FunctionalState NewState);
//用于给ADC上电,开关控制
void ADC_DMACmd(ADC_TypeDef* ADCx, FunctionalState NewState);
//开启DMA输出信号
void ADC_ITConfig(ADC_TypeDef* ADCx, uint16_t ADC_IT, FunctionalState NewState);
//中断输出控制,控制中断能不能通往NVIC
void ADC_ResetCalibration(ADC_TypeDef* ADCx);
//复位校准
FlagStatus ADC_GetResetCalibrationStatus(ADC_TypeDef* ADCx);
//获取复位校准状态
void ADC_StartCalibration(ADC_TypeDef* ADCx);
//开始校准
FlagStatus ADC_GetCalibrationStatus(ADC_TypeDef* ADCx);
//获取开始校准状态
void ADC_SoftwareStartConvCmd(ADC_TypeDef* ADCx, FunctionalState NewState);
//ADC软件触发开始转换函数
FlagStatus ADC_GetSoftwareStartConvStatus(ADC_TypeDef* ADCx);
//获取ADC软件开始转换状态//开始转换标志位就清零了//不能判断转换是否接受
void ADC_DiscModeChannelCountConfig(ADC_TypeDef* ADCx, uint8_t Number);
//间断模式:每隔几个通道间断一次
void ADC_DiscModeCmd(ADC_TypeDef* ADCx, FunctionalState NewState);
//是否启用间断模式
void ADC_RegularChannelConfig(ADC_TypeDef* ADCx, uint8_t ADC_Channel, uint8_t Rank, uint8_t ADC_SampleTime);
//ADC规则组通道配置
void ADC_ExternalTrigConvCmd(ADC_TypeDef* ADCx, FunctionalState NewState);
//ADC外部触发转换
uint16_t ADC_GetConversionValue(ADC_TypeDef* ADCx);
//ADC获取转换值
uint32_t ADC_GetDualModeConversionValue(void);
//ADC获取双模式转换值
/***********注入组配置***********/
void ADC_AutoInjectedConvCmd(ADC_TypeDef* ADCx, FunctionalState NewState);
void ADC_InjectedDiscModeCmd(ADC_TypeDef* ADCx, FunctionalState NewState);
void ADC_ExternalTrigInjectedConvConfig(ADC_TypeDef* ADCx, uint32_t ADC_ExternalTrigInjecConv);
void ADC_ExternalTrigInjectedConvCmd(ADC_TypeDef* ADCx, FunctionalState NewState);
void ADC_SoftwareStartInjectedConvCmd(ADC_TypeDef* ADCx, FunctionalState NewState);
FlagStatus ADC_GetSoftwareStartInjectedConvCmdStatus(ADC_TypeDef* ADCx);
void ADC_InjectedChannelConfig(ADC_TypeDef* ADCx, uint8_t ADC_Channel, uint8_t Rank, uint8_t ADC_SampleTime);
void ADC_InjectedSequencerLengthConfig(ADC_TypeDef* ADCx, uint8_t Length);
void ADC_SetInjectedOffset(ADC_TypeDef* ADCx, uint8_t ADC_InjectedChannel, uint16_t Offset);
uint16_t ADC_GetInjectedConversionValue(ADC_TypeDef* ADCx, uint8_t ADC_InjectedChannel);
/*********模拟看门狗配置***********/
void ADC_AnalogWatchdogCmd(ADC_TypeDef* ADCx, uint32_t ADC_AnalogWatchdog);
//是否启动模拟看门狗
void ADC_AnalogWatchdogThresholdsConfig(ADC_TypeDef* ADCx, uint16_t HighThreshold, uint16_t LowThreshold);
//配置高低阈值
void ADC_AnalogWatchdogSingleChannelConfig(ADC_TypeDef* ADCx, uint8_t ADC_Channel);
//配置看门的通道
void ADC_TempSensorVrefintCmd(FunctionalState NewState);
//ADC温度传感器、内部参考电压控制,内部两通道
FlagStatus ADC_GetFlagStatus(ADC_TypeDef* ADCx, uint8_t ADC_FLAG);
//获取标志位状态
void ADC_ClearFlag(ADC_TypeDef* ADCx, uint8_t ADC_FLAG);
//清除标志位状态
ITStatus ADC_GetITStatus(ADC_TypeDef* ADCx, uint16_t ADC_IT);
//获取中断状态
void ADC_ClearITPendingBit(ADC_TypeDef* ADCx, uint16_t ADC_IT);
//清除中断挂起位
ADC.c
#include "sys.h"
/**
* @brief ADC1单次转换,非扫描转换模式
* @param
* @retval
* @attention
*/
void AD_Init(void)
{
/*****************************开启时钟******************************/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
/*****************************结构体变量******************************/
GPIO_InitTypeDef GPIO_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
/****************************ADCCLK分频器*******************************/
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //6分频;72MHZ/6=12MHZ
/*****************************引脚模式配置******************************/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/*****************************规则组输入通道配置******************************/
ADC_RegularChannelConfig(ADC1, ADC_Channel_8, 1, ADC_SampleTime_55Cycles5); //规则组输入通道
/****************************ADC结构体初始化*******************************/
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //工作模式:独立模式
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //数据对齐:右对齐
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //外部触发转换选择:内部软件触发
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //单次转换 //需要不断触发
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //非扫描转换模式
ADC_InitStructure.ADC_NbrOfChannel = 1; //通道数目为1~16之间
ADC_Init(ADC1, &ADC_InitStructure);
ADC_Cmd(ADC1, ENABLE); //开启ADC电源
/*****************************ADC进行校准******************************/
ADC_ResetCalibration(ADC1); //复位校准
while (ADC_GetResetCalibrationStatus(ADC1) == SET); //判断校准是否完成(准备下次校准)
ADC_StartCalibration(ADC1); //启动校准
while (ADC_GetCalibrationStatus(ADC1) == SET); //获取校准状态
}
uint16_t AD_GetValue(void)
{
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //开启软件触发转换
while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); //获取标志位状态;规则组转换完成标志位(55.5+12.5=68T/12M=5.6um)
return ADC_GetConversionValue(ADC1); //获取转换的结果
}
/**
* @brief ADC1连续转换,非扫描转换模式
* @param
* @retval
* @attention
*/
#if 0
void AD_Init(void)
{
/*****************************开启时钟******************************/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
/*****************************结构体变量******************************/
GPIO_InitTypeDef GPIO_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
/****************************ADCCLK分频器*******************************/
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //6分频;72MHZ/6=12MHZ
/*****************************引脚模式配置******************************/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/*****************************规则组输入通道配置******************************/
ADC_RegularChannelConfig(ADC1, ADC_Channel_8, 1, ADC_SampleTime_55Cycles5); //规则组输入通道
/****************************ADC结构体初始化*******************************/
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //工作模式:独立模式
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //数据对齐:右对齐
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //外部触发转换选择:内部软件触发
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; //单次转换 //需要不断触发
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //非扫描转换模式
ADC_InitStructure.ADC_NbrOfChannel = 1; //通道数目为1~16之间
ADC_Init(ADC1, &ADC_InitStructure);
ADC_Cmd(ADC1, ENABLE); //开启ADC电源
/*****************************ADC进行校准******************************/
ADC_ResetCalibration(ADC1); //复位校准
while (ADC_GetResetCalibrationStatus(ADC1) == SET); //判断校准是否完成(准备下次校准)
ADC_StartCalibration(ADC1); //启动校准
while (ADC_GetCalibrationStatus(ADC1) == SET); //获取校准状态
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //开启一次软件触发转换即可
}
uint16_t AD_GetValue(void)
{
return ADC_GetConversionValue(ADC1); //获取转换的结果
}
#endif
/**
* @brief ADC1单次转换,非扫描转换模式,实现多通道转换
* @param
* @retval
* @attention
*/
#if 0
void AD_Init(void)
{
/*****************************开启时钟******************************/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE);
/*****************************结构体变量******************************/
GPIO_InitTypeDef GPIO_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
/****************************ADCCLK分频器*******************************/
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //6分频;72MHZ/6=12MHZ
/*****************************引脚模式配置******************************/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*****************************规则组输入通道配置放到读取函数里******************************/
//ADC_RegularChannelConfig(ADC1, ADC_Channel_8, 1, ADC_SampleTime_55Cycles5); //规则组输入通道
/****************************ADC结构体初始化*******************************/
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //工作模式:独立模式
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //数据对齐:右对齐
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //外部触发转换选择:内部软件触发
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //单次转换 //需要不断触发
ADC_InitStructure.ADC_ScanConvMode = DISABLE; //非扫描转换模式
ADC_InitStructure.ADC_NbrOfChannel = 1; //通道数目为1~16之间
ADC_Init(ADC1, &ADC_InitStructure);
ADC_Cmd(ADC1, ENABLE); //开启ADC电源
/*****************************ADC进行校准******************************/
ADC_ResetCalibration(ADC1); //复位校准
while (ADC_GetResetCalibrationStatus(ADC1) == SET); //判断校准是否完成(准备下次校准)
ADC_StartCalibration(ADC1); //启动校准
while (ADC_GetCalibrationStatus(ADC1) == SET); //获取校准状态
}
uint16_t AD_GetValue(uint8_t ADC_Channel)
{
/*****************************规则组输入通道配置放到读取函数里******************************/
ADC_RegularChannelConfig(ADC1, ADC_Channel, 1, ADC_SampleTime_55Cycles5); //规则组输入通道
ADC_SoftwareStartConvCmd(ADC1, ENABLE); //开启软件触发转换
while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET); //获取标志位状态;规则组转换完成标志位(55.5+12.5=68T/12M=5.6um)
return ADC_GetConversionValue(ADC1); //获取转换的结果
}
#endif
ADC.h
#ifndef __AD_H
#define __AD_H
#include "sys.h"
void AD_Init(void);
uint16_t AD_GetValue(void);
#endif



















 1577
1577

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











