







3.1 区别
kdtree只有k近领域搜索和半径搜索
octree可以体素内近邻搜索、k近领域搜索和半径搜索
3.2 定义
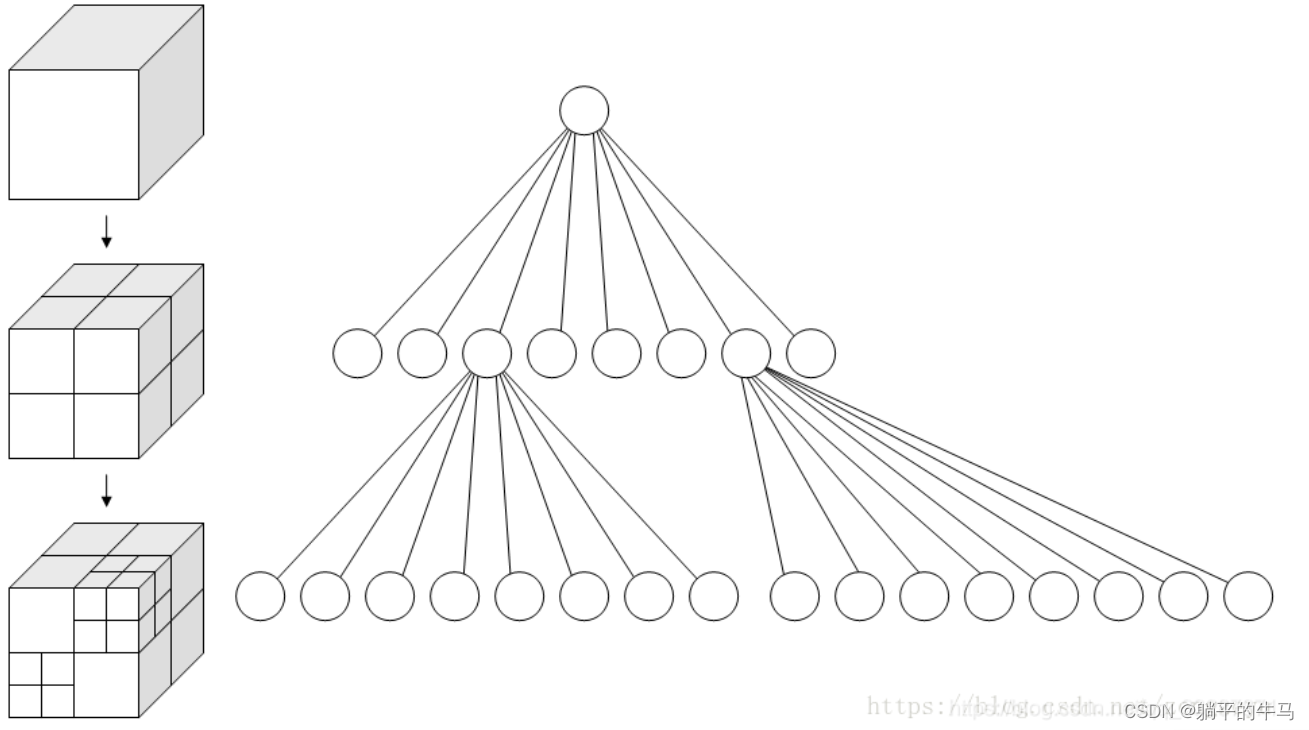
八叉树结构通过对三维空间的几何实体进行体元剖分,每个体元具有相同的时间和空间复杂度,通过循环递归的划分方法对大小为 (2n∗2n∗2n)的三维空间的几何对象进行剖分,从而构成一个具有根节点的方向图。在八叉树结构中如果被划分的体元具有相同的属性,则该体元构成一个叶节点;否则继续对该体元剖分成8个子立方体,依次递剖分,对于 (2n∗2n∗2n)大小的空间对象,最多剖分 n次,如下图所示。
3.3 代码
#include <pcl/point_cloud.h>
#include <pcl/octree/octree_search.h>
#include <iostream>
#include <vector>
#include <ctime>
using namespace pcl;
using namespace std;
int main(int argc, char** argv)
{
srand((unsigned int)time(NULL));
PointCloud<PointXYZ>::Ptr cloud(new PointCloud<PointXYZ>);//cloud指针
// 创建点云数据,随机构造点云
cloud->width = 1000;
cloud->height = 1;
cloud->points.resize(cloud->width * cloud->height);
for (std::size_t i = 0; i < cloud->points.size(); ++i)
{
cloud->points[i].x = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024.0f * rand() / (RAND_MAX + 1.0f);
}
// 创建八叉树流程
float resolution = 128.0f;
// 分辨率,最小体素尺寸,不再单独往下分了:可以看作是八叉树的深度受分辨率和空间维度的影响
octree::OctreePointCloudSearch<pcl::PointXYZ> octree(resolution); // 设置分辨率初始化
// 设置输入点云
octree.setInputCloud(cloud);
// 定义Octree边界框(可选操作)
//计算输入点云的边界框
// octree.defineBoundingBox();
//手动定义点云的边界框
//octree.defineBoundingBox(minX, minY, minZ, maxX, maxY, maxZ);
// 输入点云添加到Octree,执行构建八叉树,上面只是把点云输进去,没实际执行
octree.addPointsFromInputCloud();
// 创建一个随机点
PointXYZ searchPoint;
searchPoint.x = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.y = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.z = 1024.0f * rand() / (RAND_MAX + 1.0f);
// Neighbors within voxel search
std::vector<int> pointIdxVec;// 存储索引,存储索引,对cloud点云的索引
// 体素近邻搜索:把和查询点在同一体素中的点的索引返回
if (octree.voxelSearch(searchPoint, pointIdxVec))
{
std::cout << "Neighbors within voxel search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z << ")"
<< std::endl;
for (std::size_t i = 0; i < pointIdxVec.size(); ++i)
std::cout << " " << cloud->points[pointIdxVec[i]].x
<< " " << cloud->points[pointIdxVec[i]].y
<< " " << cloud->points[pointIdxVec[i]].z << std::endl;
}
// K nearest neighbor search
// k近邻搜索
int K = 10;
std::vector<int> pointIdxNKNSearch; // 搜索结果的索引
std::vector<float> pointNKNSquaredDistance;// 对应的距离值
std::cout << "K nearest neighbor search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with K=" << K << std::endl;
if (octree.nearestKSearch(searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0)
{
for (std::size_t i = 0; i < pointIdxNKNSearch.size(); ++i)
std::cout << " " << cloud->points[pointIdxNKNSearch[i]].x
<< " " << cloud->points[pointIdxNKNSearch[i]].y
<< " " << cloud->points[pointIdxNKNSearch[i]].z
<< " (squared distance: " << pointNKNSquaredDistance[i] << ")" << std::endl;
}
// Neighbors within radius search
// 半径近邻搜索
std::vector<int> pointIdxRadiusSearch;// 搜索结果的索引
std::vector<float> pointRadiusSquaredDistance;// 对应的距离
float radius = 256.0f * rand() / (RAND_MAX + 1.0f);
std::cout << "Neighbors within radius search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with radius=" << radius << std::endl;
if (octree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0)
{
for (std::size_t i = 0; i < pointIdxRadiusSearch.size(); ++i)
std::cout << " " << cloud->points[pointIdxRadiusSearch[i]].x
<< " " << cloud->points[pointIdxRadiusSearch[i]].y
<< " " << cloud->points[pointIdxRadiusSearch[i]].z
<< " (squared distance: " << pointRadiusSquaredDistance[i] << ")" << std::endl;
}
// 删除八叉树,释放内存
octree.deleteTree();
}
3.4 结果
索引的结果是128分辨率时的(565.625 88.8125 342.062)这个点作为一个小体素块时里面包含的另外535.。。。和515.。。。的两个点在它体内
3.5 注意
如果需要高效内存管理,空间检测,需要使用八叉树双缓冲技术实现(Octree2BufBase类),该类可以同时保存两个类似的八叉树对象
3.6 八叉树的五种类型















 602
602











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









