







1 PCA主成分分析
1.1 前提知识
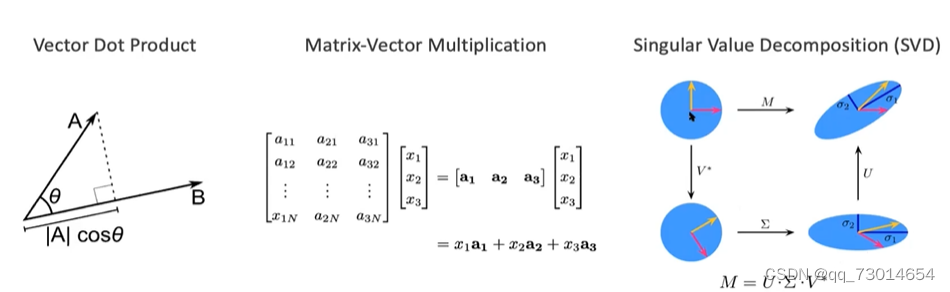
(1)向量内积:即一个向量在另外一个向量上的投影;
(2)矩阵x向量:矩阵列向量的线性组合;
(3)SVD分解:经过V的旋转,sgm的缩放,U的再次旋转,结果即等价为M。
 1.2 谱定理
1.2 谱定理
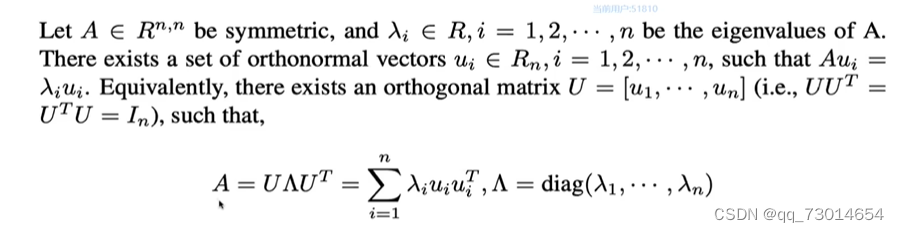
谱定理,大致意思是对于一个对称矩阵,我们可以用他的特征值特征向量的线性组合表示,严格说明如下:
1.3 瑞利熵
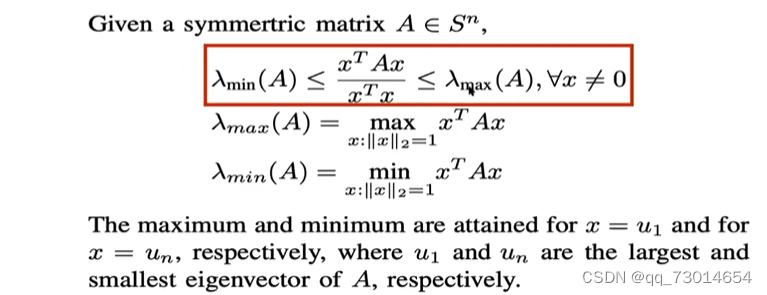
分子为任取向量的模长,用svd的几何意义理解就是对A进行旋转和缩放,旋转不会改变特征值,只有缩放改变其特征值。
1.4 PCA
 高维的点,与具有代表的列向量。
高维的点,与具有代表的列向量。
Q1:什么是最主要的成分——z1?
也即是说如果把一堆高维的点投影到某一个方向上,使得他的方差最大也就是说那些点在那些方向上分布的最离散。
Q2:找到z1之后怎么找主成分z2向量?
将xi关于z1的全部剔除掉,再找剩余点最主要的成分,即为z2,以此类推。
1.4.1 解析
首先是将其设为0,因为主要关心的是方向,而不是值的大小。
(1)对数据进行去均值
![]()
(2)PCA希望寻找一个方向(主方向),使得数据在该方向上的方差最大,我们假设一个主方向 𝑧∈,|𝑧|=1,然后投影到该方向上—内积:
(3)由于数据已经减去了均值,那么根据方差的定义,平方求和就是方差了:

(4)目标是方差最大,即求:
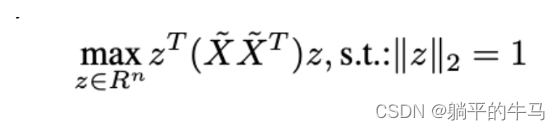
在这里, 𝐴= 是对称阵,当 𝑧 取 𝐴 的最大特征值对应的特征向量时,我们的目标函数取到最大值。

其中z为||z||=1,故zT*z=1。则最后化简得:
min(A)<=z^T*A*z<=
max(A)
关键就是求A的特征值与特征向量。
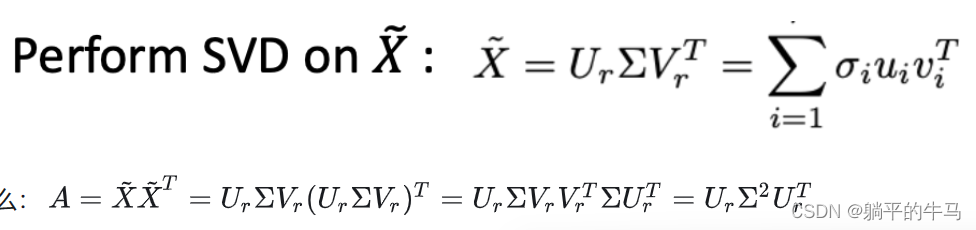
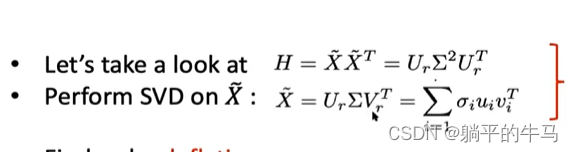
(5)svd分解
如果特征值由大到小排列,那么 𝑈𝑟 的第一列就是最大特征值对应的特征向量。至此,我们找到了一个主方向,数据在这个方向上投影后,方差最大。

















 2696
2696

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









