#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/common/io.h>
#include <pcl/keypoints/iss_3d.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <boost/thread/thread.hpp>
typedef pcl::PointCloud<pcl::PointXYZRGBA> PointCloud;
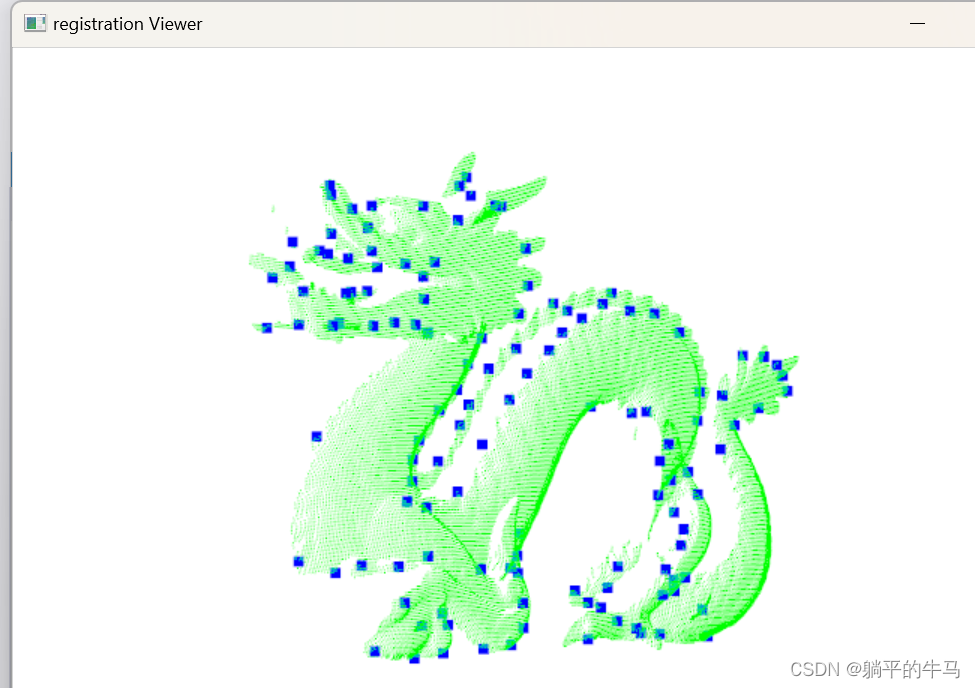
// 点云可视化函数
// 显示原始点云(model)和提取的关键点(scene_keypoints)
void visualize_pcd(PointCloud::Ptr model, pcl::PointCloud<pcl::PointXYZRGB>::Ptr scene_keypoints)
{
pcl::visualization::PCLVisualizer viewer("registration Viewer");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZRGBA> model_color(model, 0, 255, 0);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZRGB> scene_keypoint_color(scene_keypoints, 0, 0, 255);
viewer.setBackgroundColor(255, 255, 255);
viewer.addPointCloud(model, model_color, "model");
viewer.addPointCloud(scene_keypoints, scene_keypoint_color, "scene_keypoints");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "scene_keypoints");
while (!viewer.wasStopped())
{
viewer.spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
// 你的文件地址
const std::string filename = "D:\\adiany\\dataset\\pcd\\dragonStandRight_0.pcd";
int main(int, char** argv)
{
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGBA>);
// 读取点云文件
if (pcl::io::loadPCDFile<pcl::PointXYZRGBA>(filename, *cloud) == -1)
{
pcl::console::print_error("Couldn't read file %s!\n", argv[1]);
return (-1);
}
std::cout << "points: " << cloud->points.size() << std::endl;
// ISS关键点检测器
pcl::ISSKeypoint3D<pcl::PointXYZRGBA, pcl::PointXYZRGB> iss_detector;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr keypoints(new pcl::PointCloud<pcl::PointXYZRGB>());
pcl::search::KdTree<pcl::PointXYZRGBA>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZRGBA>());
// 设置ISS检测器的参数
iss_detector.setSearchMethod(tree);
iss_detector.setSalientRadius(0.007f); // 显著半径
iss_detector.setNonMaxRadius(0.005f); // 非最大抑制半径
iss_detector.setThreshold21(0.65); // 用于设置二三特征值比的阈值
iss_detector.setThreshold32(0.1); // 用于设置三一特征值比的阈值
iss_detector.setMinNeighbors(4); // 邻域最小点数
iss_detector.setNumberOfThreads(4); // 并行处理的线程数
iss_detector.setInputCloud(cloud); // 设置输入点云
iss_detector.compute(*keypoints); // 计算关键点
std::cout << "Number of ISS_3D points in the result: " << (*keypoints).points.size() << std::endl;
pcl::io::savePCDFile("keypoints_iss_3d.pcd", *keypoints, true);
// 可视化
visualize_pcd(cloud, keypoints);
return 0;
}






















 1033
1033











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









