







直流电机简介
直流电机是一种将电能转换为机械能的装置。一般有两个电极,电极正接时,电机正转;电极反接时,电机反转。
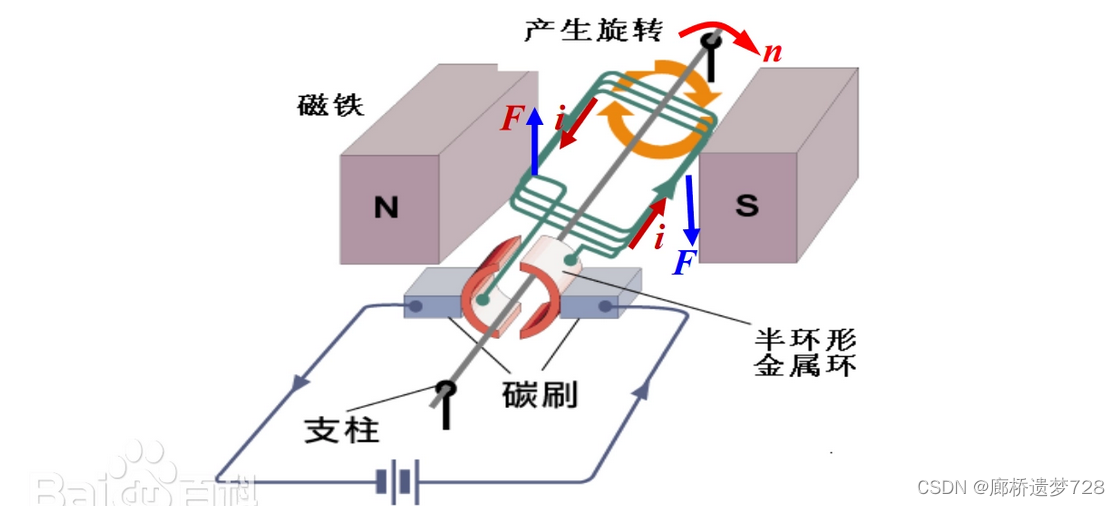
除直流电机外,常见的电机还有步进电机、舵机、无刷电机、空心杯电机等。
电机驱动电路
电机属于大功率负载,如果直接接在I/O口,会损坏单片机硬件。因此需要在单片机和电机之间加入驱动电路,常见的是大功率器件直接驱动和H桥驱动。
大功率器件直接驱动
注意,此驱动方式不能控制转向。
1、用普通电路直接驱动
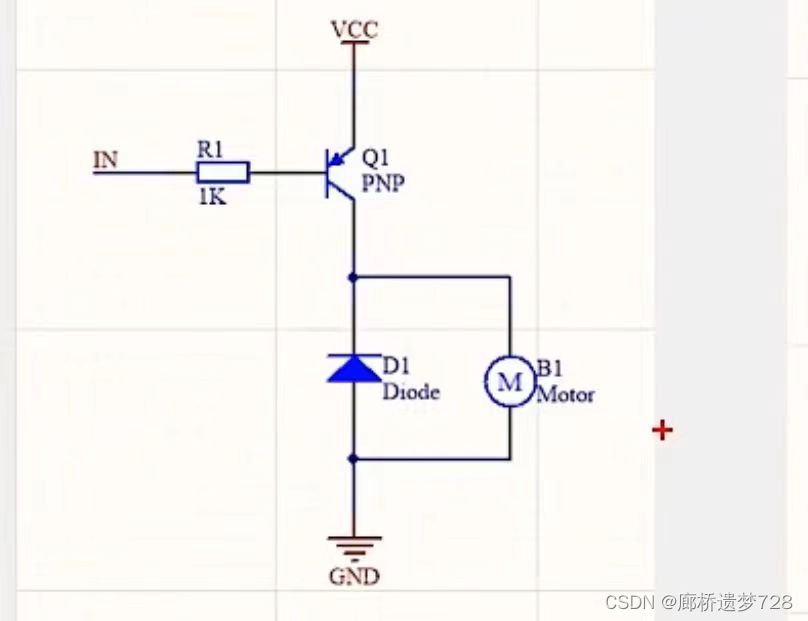
当给信号0时,即IN为低电平时,三极管导通,电机被驱动;当信号1时,即IN为高电平时,三极管断开。
其中,二级管为续流二极管,因为电机为感性负载元件,在三极管有导通到断开
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2966
2966

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









