







 本文介绍了流场寻路算法在解决大量目标寻路问题中的应用,避免了传统A*算法对每个目标单独计算的高成本。通过一次计算生成的流场,所有移动目标共享,有效应对大规模寻路。内容包括算法实现的主要效果、动态障碍物处理和OpenGl使用中遇到的Bug。同时,提到了Dijkstra算法在生成最短路径中的作用,以及算法的实现步骤和参考资料。
本文介绍了流场寻路算法在解决大量目标寻路问题中的应用,避免了传统A*算法对每个目标单独计算的高成本。通过一次计算生成的流场,所有移动目标共享,有效应对大规模寻路。内容包括算法实现的主要效果、动态障碍物处理和OpenGl使用中遇到的Bug。同时,提到了Dijkstra算法在生成最短路径中的作用,以及算法的实现步骤和参考资料。
流场寻路算法简单实现
Flow field pathfinding algorithm implementation
Introduction:
流场寻路算法主要用于解决地图中大量目标寻路问题,像传统的寻路算法(如A*)需要对每个移动目标进行单独的最优路径计算,这样对于大量目标同时寻路时,那么计算代价就会相当大,甚至导致游戏帧频率下降,画面卡顿,游戏体验大大降低。对于这个问题,流场寻路算法的一遍计算,在地图中生成流场,所有移动目标共用流场,从而就能轻松应对大量目标同时寻路问题了。当前实现的主要效果:
1.地图上随机分布200个移动目标;
2.移动目标可绕过障碍物,沿着地图的流场找到最短路径(最小代价的路径)到达目标点;
3.可通过点击地图上的非障碍物区域,实时的更改目标地点,并更新流场;
4.可通过按着鼠标左键在地图上拖拽,实时绘制障碍物,并动态更新流场;效果图:
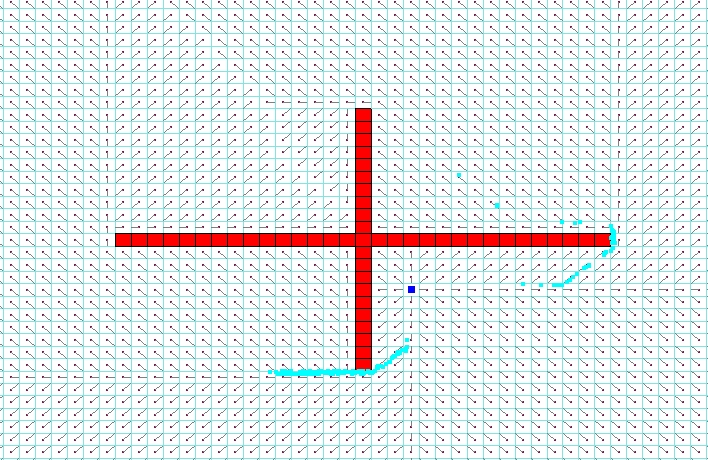
蓝色点为终点,红色块为障碍物,蔚蓝色小点为移动目标,小点加线为流场方向指示箭头。这里的地图为均匀地图(即地图中每个网格的代价相同)1.初始地图效果:
2.动态设置障碍物效果:
3.重置终点效果:
Bug:
由于初次使用OpenGl,


 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 16
16

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









