






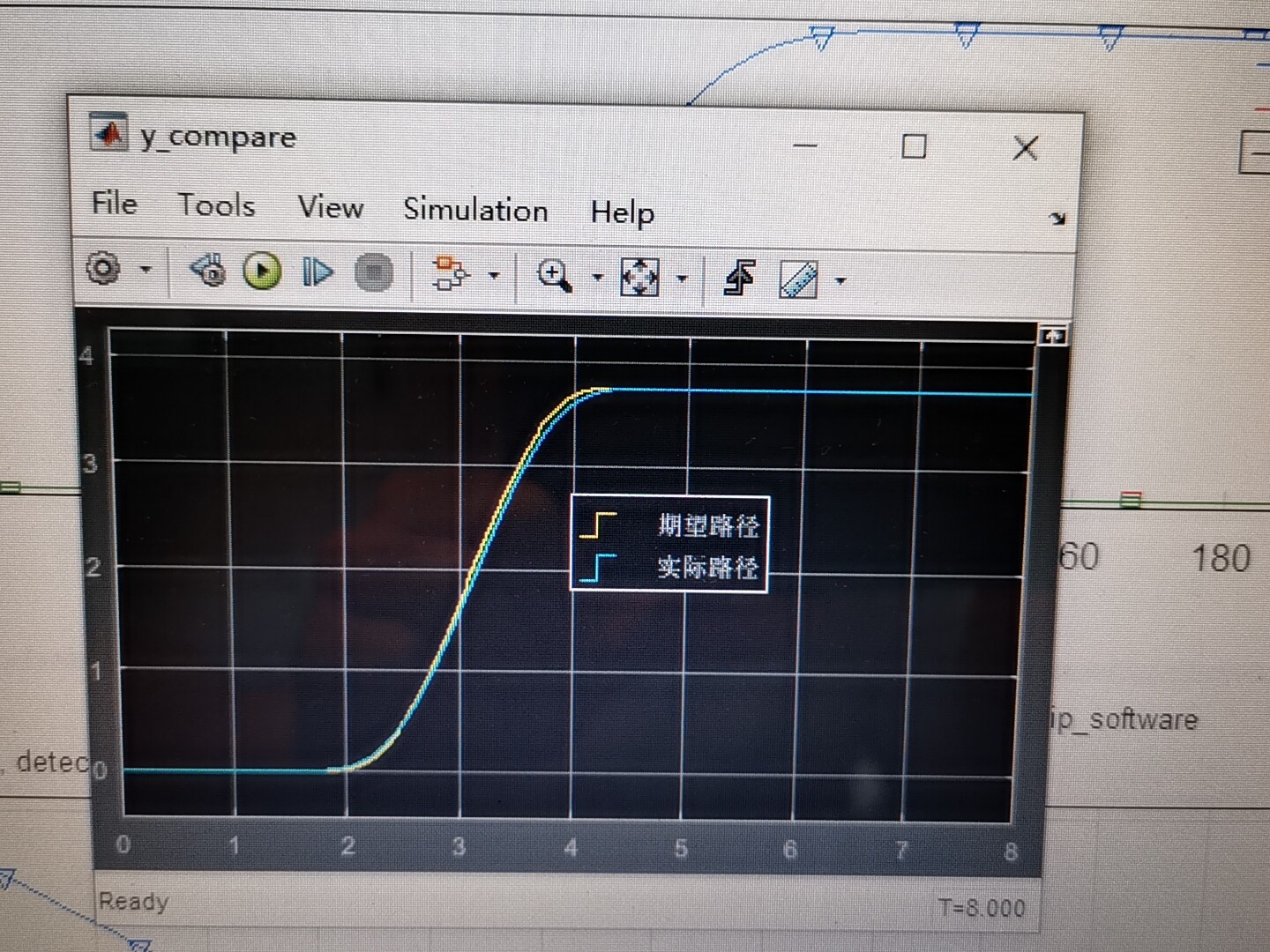
基于五次多项式的智能车横向避幢模型,首先根据工况计算出预碰撞时间,进而计算出最小转向距离,通过MPC预测控制算法来对规划路径进行跟踪控制。
ID:3388618947267888
琅琊双子座灯草
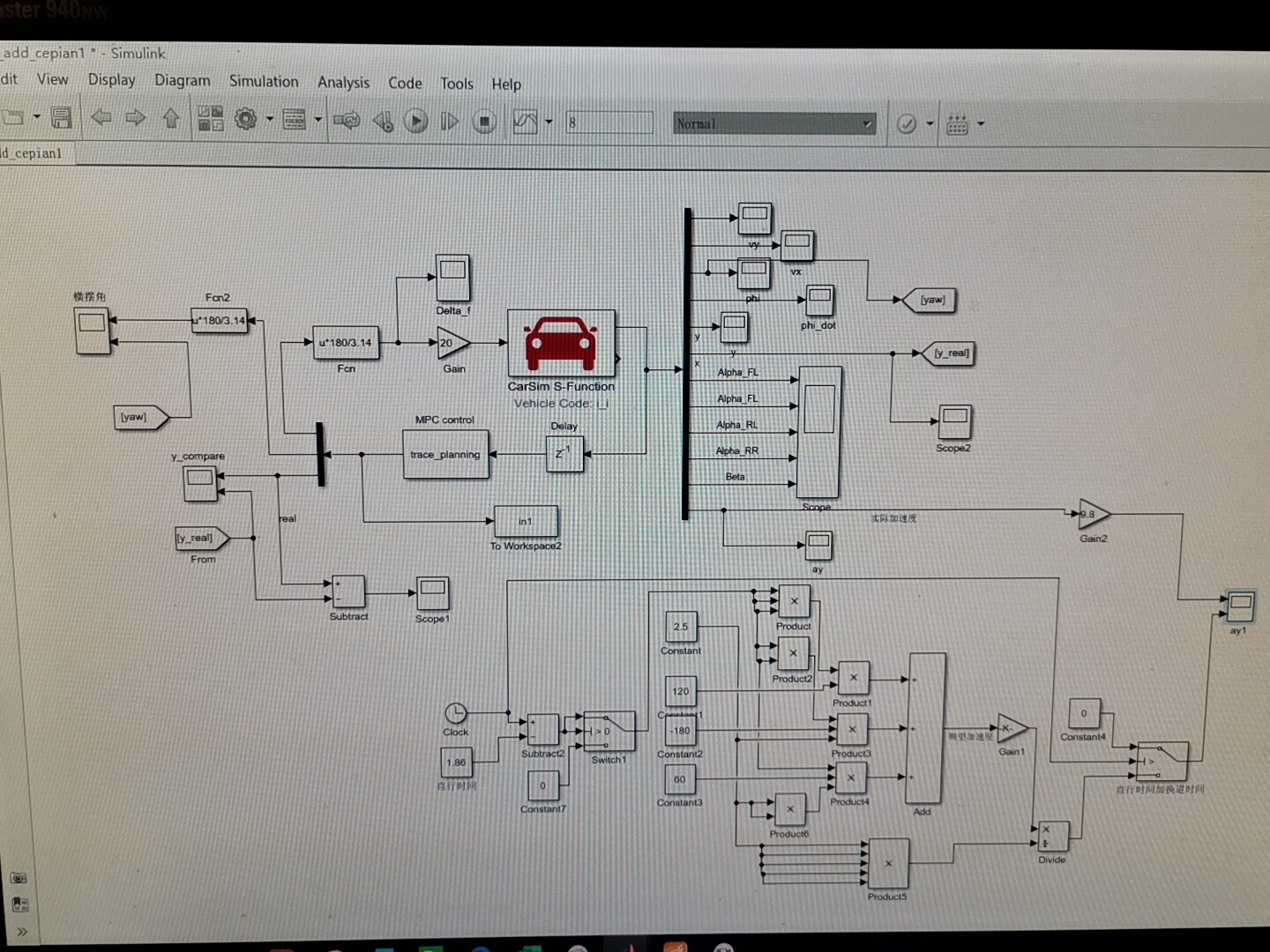
智能车横向避障是自动驾驶领域中的一个重要问题。为了实现横向避障功能,我们提出了基于五次多项式的智能车横向避障模型。该模型通过运用预碰撞时间、最小转向距离和MPC预测控制算法来实现路径跟踪控制。
首先,我们需要根据工况计算出预碰撞时间。预碰撞时间是指智能车在与障碍物即将发生碰撞之前的时间段。通过计算智能车与障碍物之间的距离和相对速度,我们可以得到预碰撞时间。这个时间可以作为智能车进行规划路径和控制动作的重要依据。
接下来,我们需要计算出最小转向距离。最小转向距离是指智能车为了避开障碍物所需的最小转向半径。通过分析智能车的动力学特性、车辆几何形状和障碍物的位置信息,我们可以确定最小转向距离。这个距离可以帮助智能车在避障过程中保持足够的安全间距,并选择合适的转向动作。
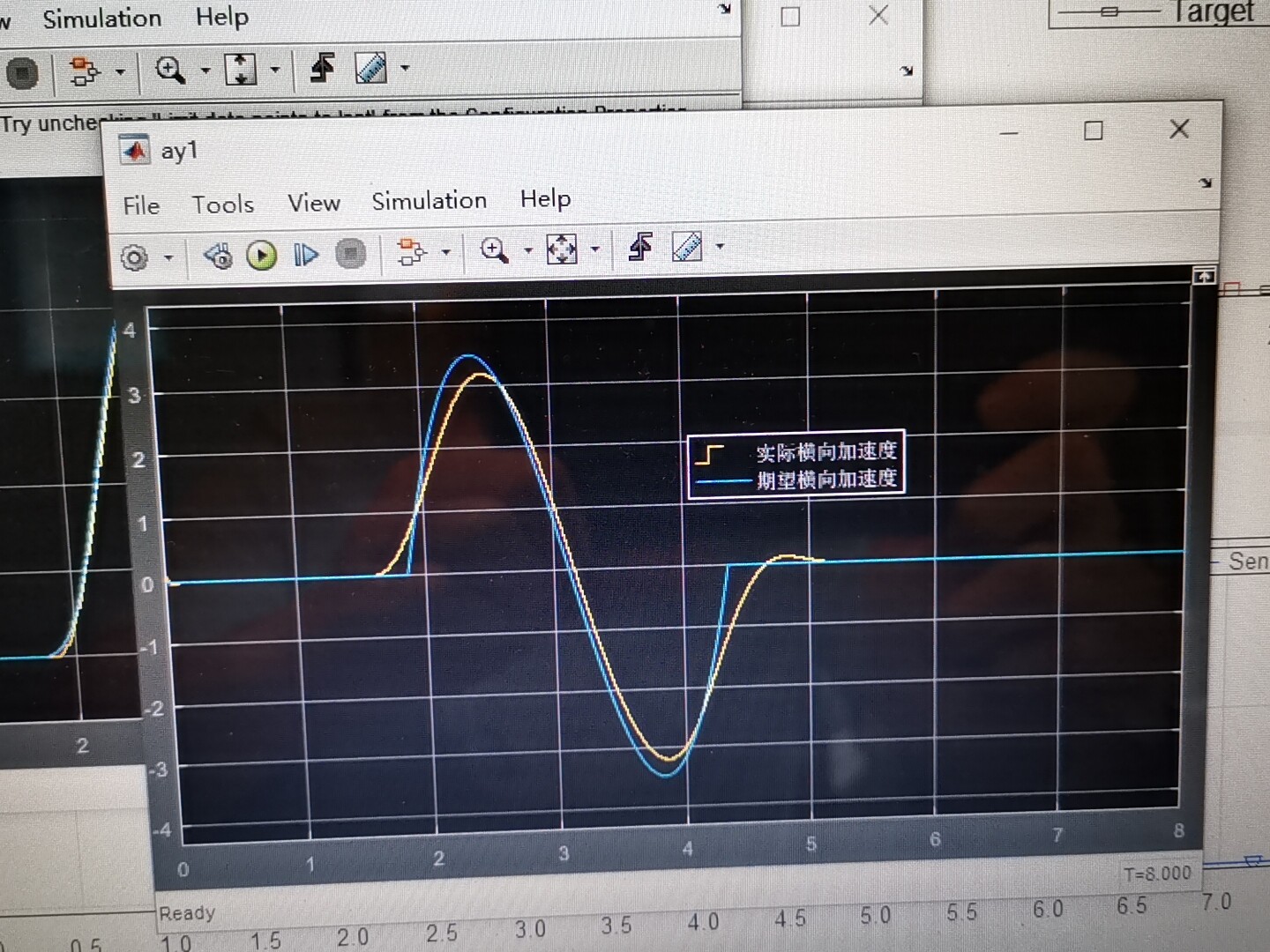
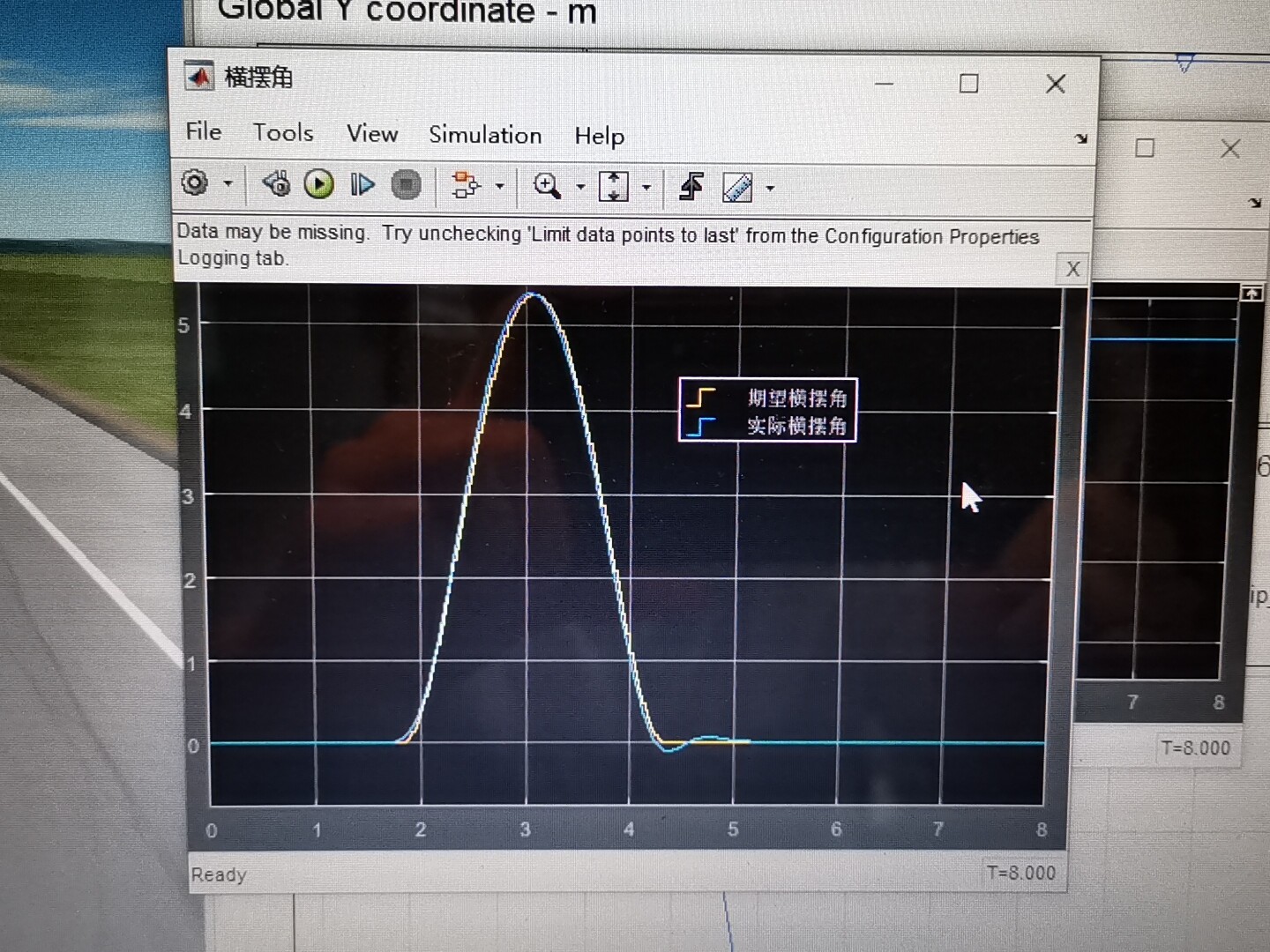
最后,我们使用MPC预测控制算法来对规划路径进行跟踪控制。MPC算法是一种基于模型预测的控制方法,通过对未来一段时间内的状态和控制变量进行优化,来实现对系统的闭环控制。在我们的智能车横向避障模型中,我们使用MPC算法来预测智能车的运动轨迹,并根据预测结果来调整车辆的控制动作。通过不断优化预测和控制,智能车可以高效、安全地避开障碍物。
综上所述,基于五次多项式的智能车横向避障模型是一种应用广泛且有效的方法。通过计算预碰撞时间和最小转向距离,并运用MPC预测控制算法,智能车可以实现高效且安全的横向避障功能。这种模型在实际应用中可以帮助智能车避免与障碍物发生碰撞,提高行驶的安全性和可靠性。
需要注意的是,智能车横向避障模型仍然存在一些挑战和改进的空间。例如,模型的准确度和适应性可以进一步提升,以应对不同的工况和复杂的道路环境。此外,模型的计算效率和实时性也需要加以考虑。未来的研究可以集中在这些方面,并结合更多的实际场景进行验证和实验。
相关的代码,程序地址如下:http://imgcs.cn/618947267888.html
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









