






车道偏离预警——LDW
Carsim与simulink联合仿真模型,采用Carsim中自带场景+基于预瞄的驾驶员模型
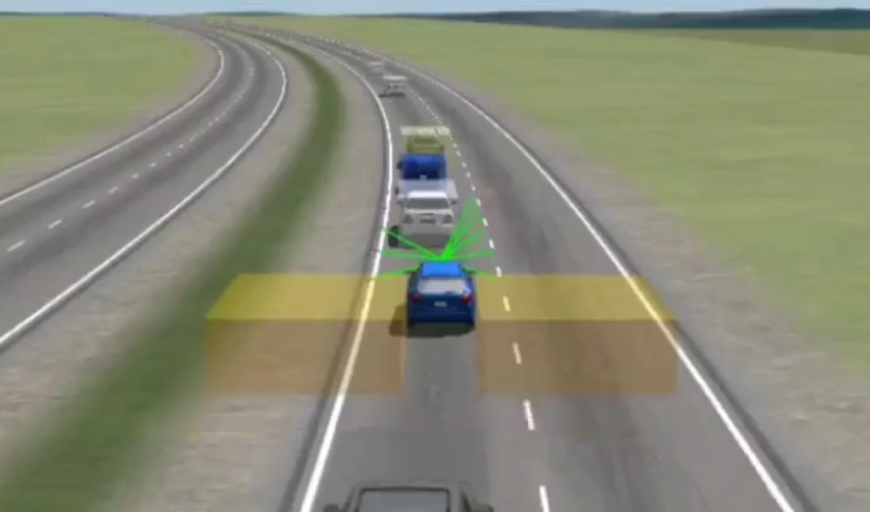
当基于摄像头对车道线进行检测并跟踪,当出现车辆偏离车道线时,自动发出预警信息,并在HUD界面显示
驾驶员模型算法部分支持定制,可以提供PID控制算法,模糊PID控制算法,单点预瞄跟随算法,Stanley算法,滑膜变结构控制算法,以及多点预瞄跟随算法
具体实现效果如视频所示,可以自定义道路和场景
ID:16100674153054988
多不多啦米

车道偏离预警是一种为了提高行车安全的技术手段。在车辆行驶过程中,如果驾驶员不慎偏离车道线,将会增加交通事故的风险。因此,车辆自动预警系统的引入成为了当前研究的热点之一。
在车道偏离预警系统中,Carsim与Simulink联合仿真模型被广泛采用。Carsim作为一个汽车动力学仿真软件,可以提供车辆运动学和动力学的模拟。而Simulink作为一个功能强大的模型设计与仿真平台,能够对车道偏离预警系统进行建模和仿真。
在Carsim中,通过结合自带的场景和基于预瞄的驾驶员模型,可以实现车辆在不同道路场景下的行为模拟。预瞄驾驶员模型是一种基于驾驶员行为研究的模型,能够根据车辆的状态信息进行实时的预测和决策。通过摄像头对车道线进行检测并跟踪,当车辆偏离车道线时,系统会自动发出预警信息,并在HUD界面进行显示。
在驾驶员模型算法部分,支持定制化的设计。可以根据具体需求选择不同的控制算法。PID控制算法是一种经典的控制算法,能够根据误差信号进行反馈控制。模糊PID控制算法结合了模糊逻辑和PID控制算法,能够更好地处理非线性系统。单点预瞄跟随算法通过预测未来的车辆状态进行控制。Stanley算法则是一种基于横向误差和航向角误差的控制算法。滑膜变结构控制算法是一种鲁棒控制算法,能够适应不确定性和扰动。多点预瞄跟随算法通过多个预瞄点进行控制,能够更好地适应车辆行驶的路径。
通过以上算法的选择和组合,可以实现车辆的稳定行驶和准确控制。具体的实现效果可以通过视频进行展示。同时,系统也支持自定义道路和场景,能够适应不同的驾驶条件和环境。
总结而言,车道偏离预警系统将Carsim和Simulink联合使用,利用基于预瞄的驾驶员模型和摄像头检测技术实现车道偏离预警。驾驶员模型算法部分支持多种控制算法的定制化设计,可以根据具体需求选择不同的算法。系统具有较好的稳定性和准确性,能够在不同道路和场景下实现车辆的安全行驶。
相关的代码,程序地址如下:http://wekup.cn/674153054988.html
















 442
442

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









