






为了实现智能对话系统,用RDK x5 作为硬件载体来进行语义试验是一种享受。因为x5基于Ubuntu,便利地调用ros 和 llm大语言模型。
具体如何在地瓜x5是启动llm,参考官网的文章
本文着重研究如何“两台x5” 进行沟通:
a)把在命令行调用转化成 Python 调用。
b)是否支持个性化?
c)如何进行通讯?
具体操作如下:
a)简单实验:
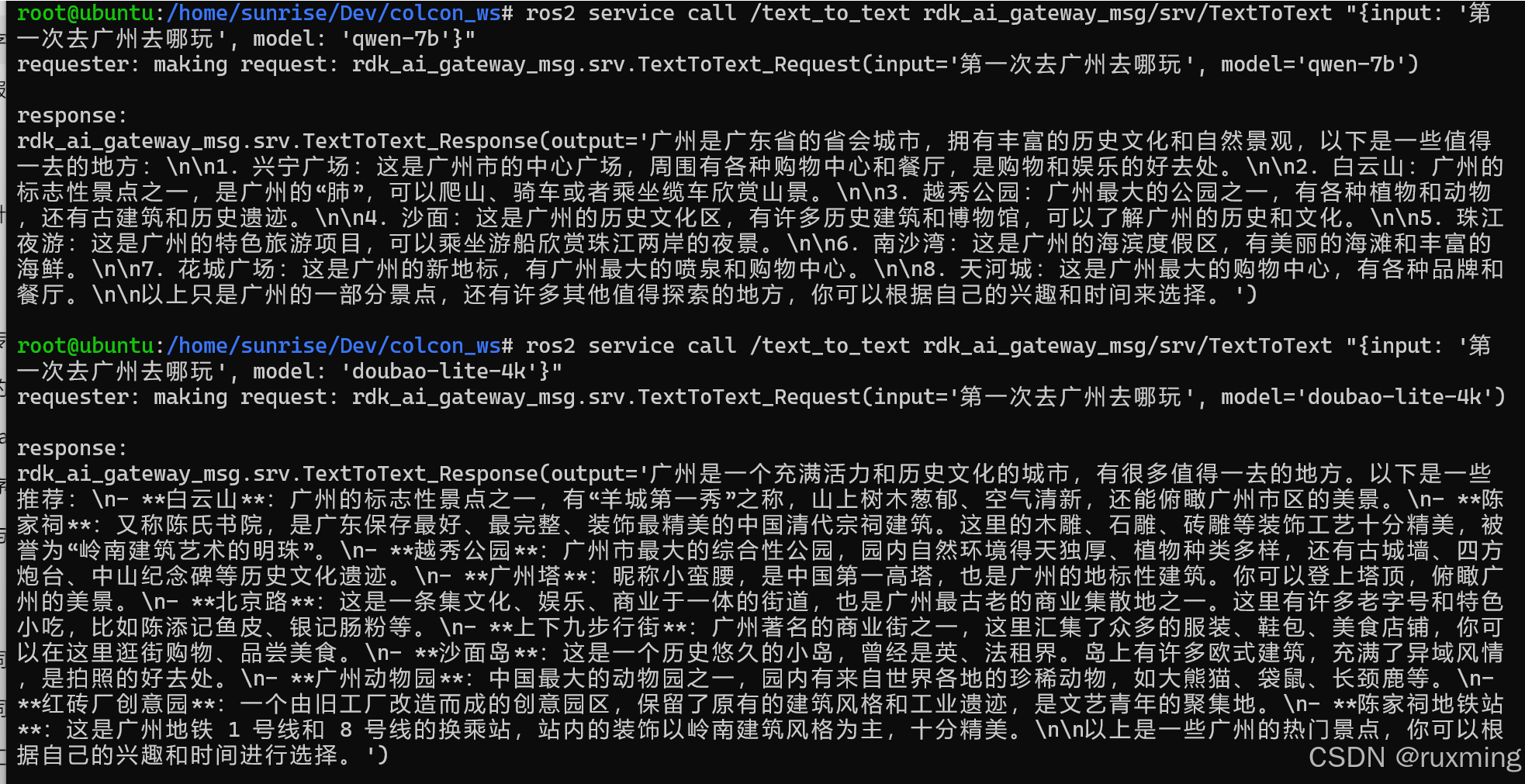
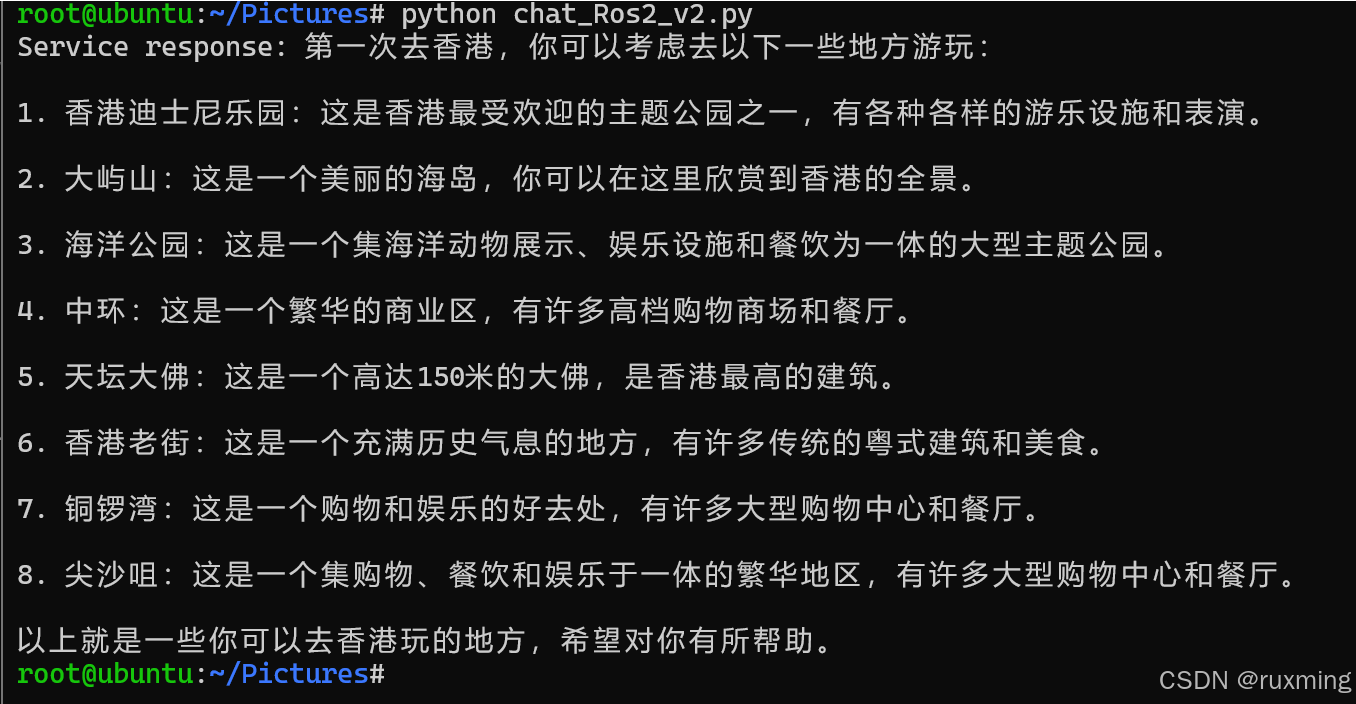
a)在第一台启动llm 服务。看到了上面client的请求: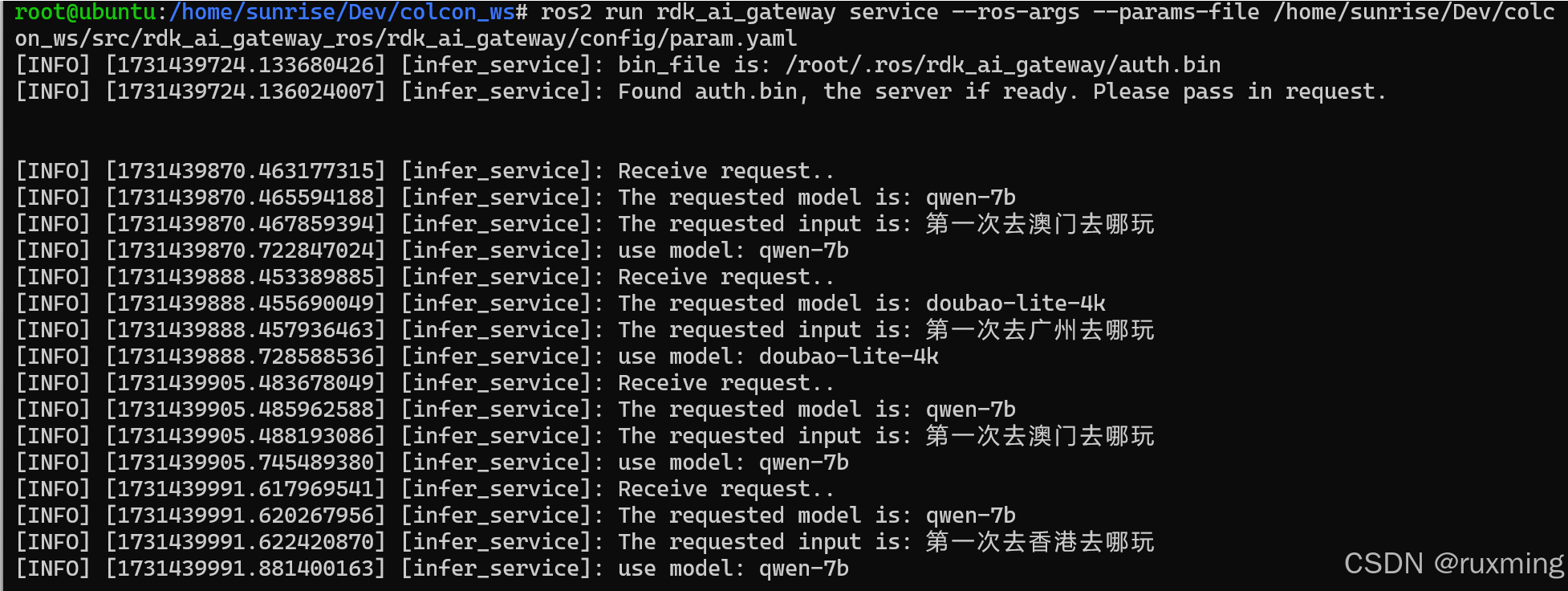
client 在命令行环境得到回复。

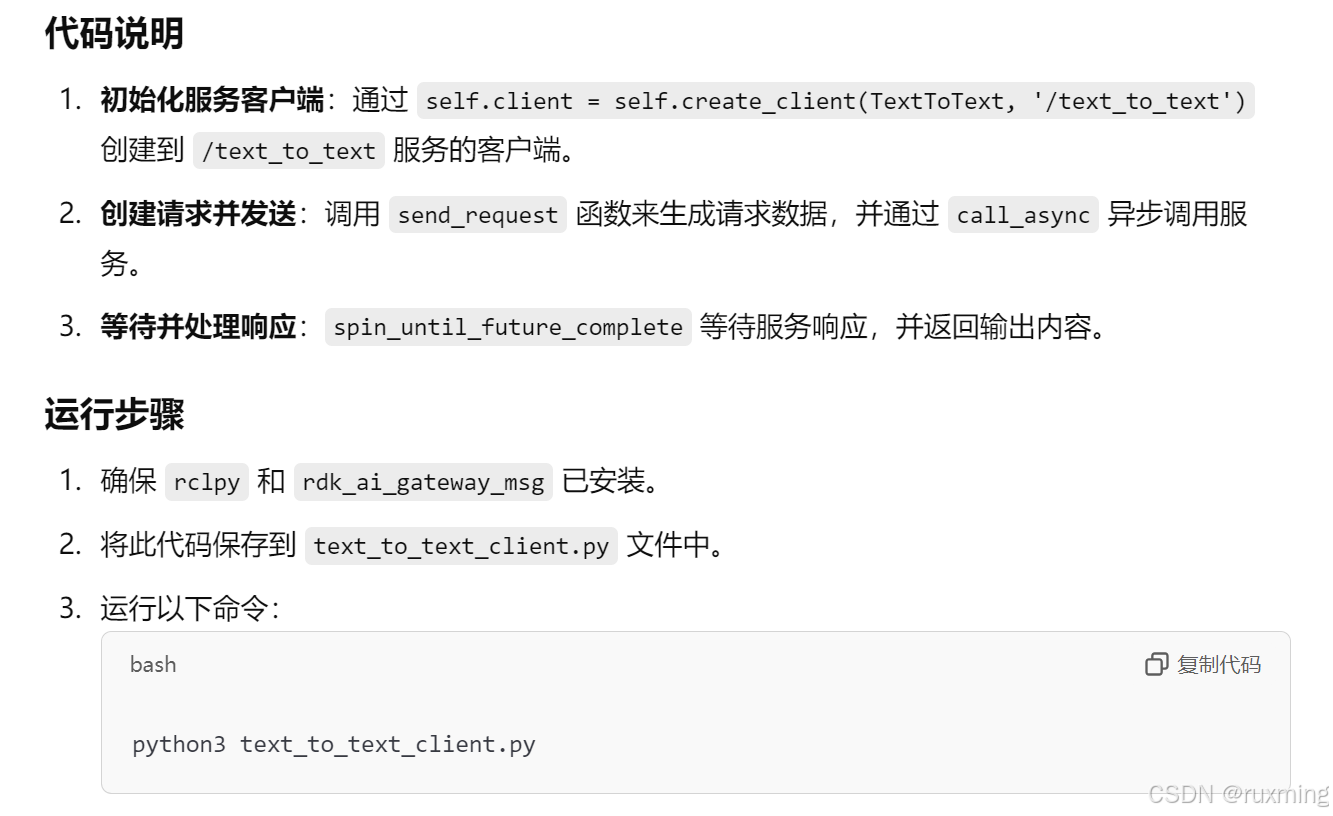
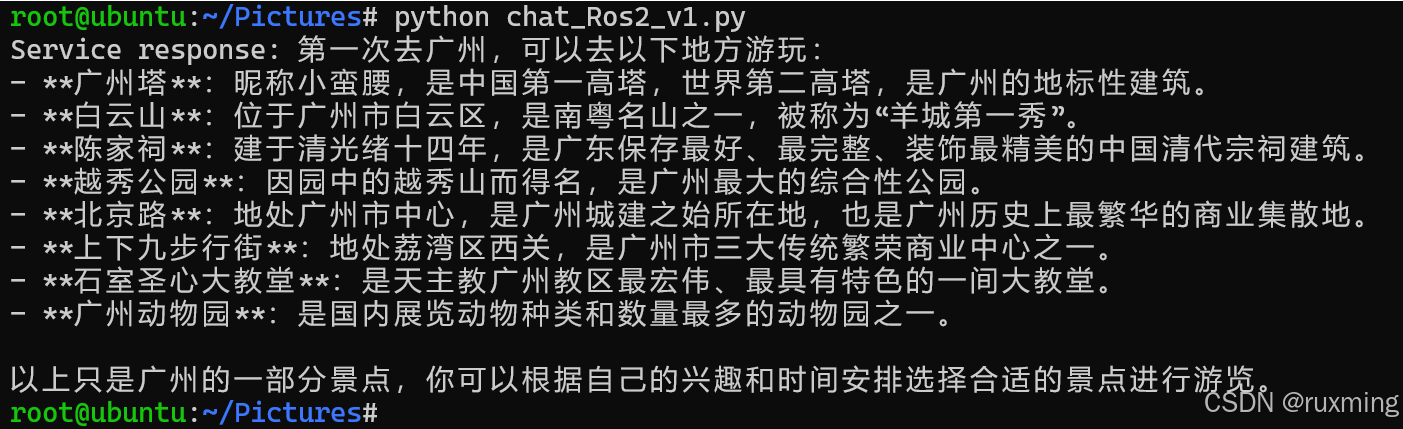
a)使用Python来调用同样的ros 命令:
a)
~~~~~
b)在chatgpt下实验个性化记忆。
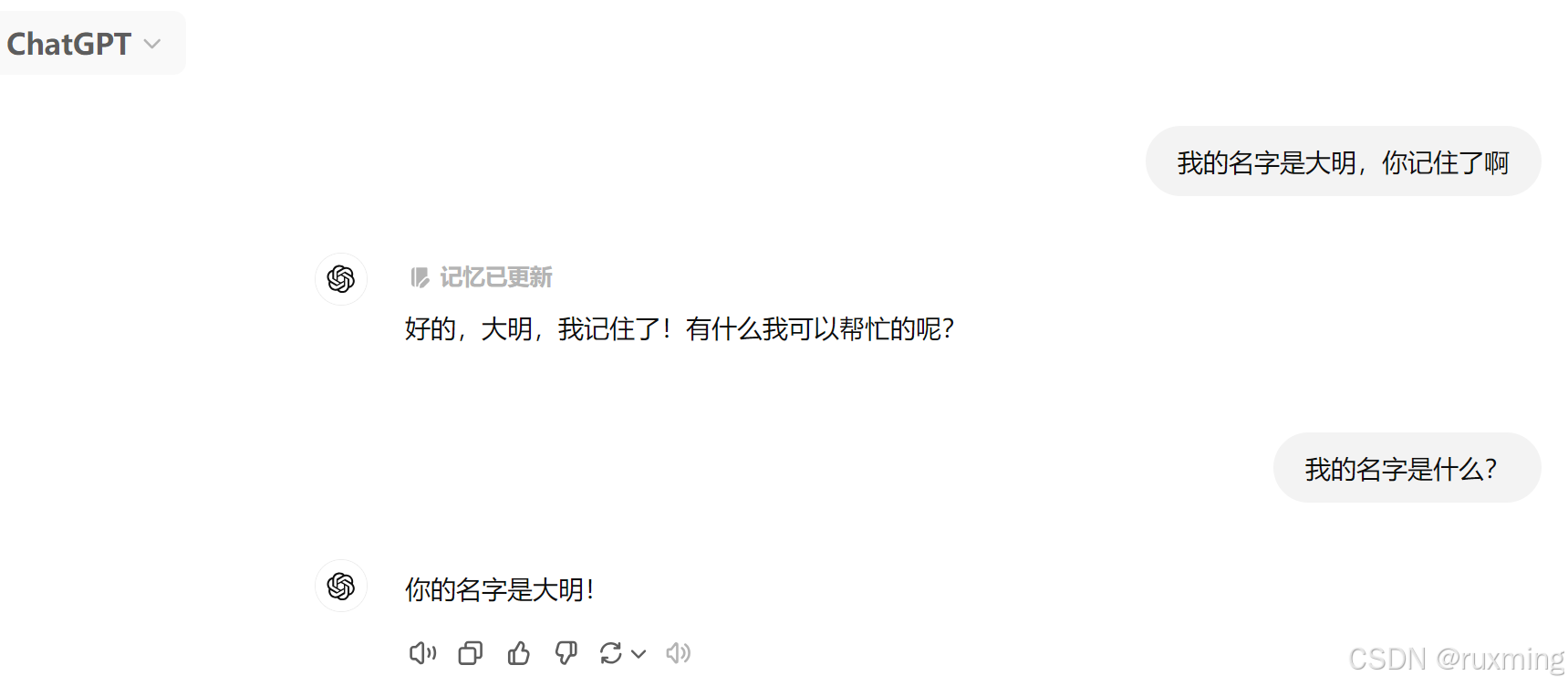
b)同样的问题,问x5的llm:(调用ros,在os命令行)
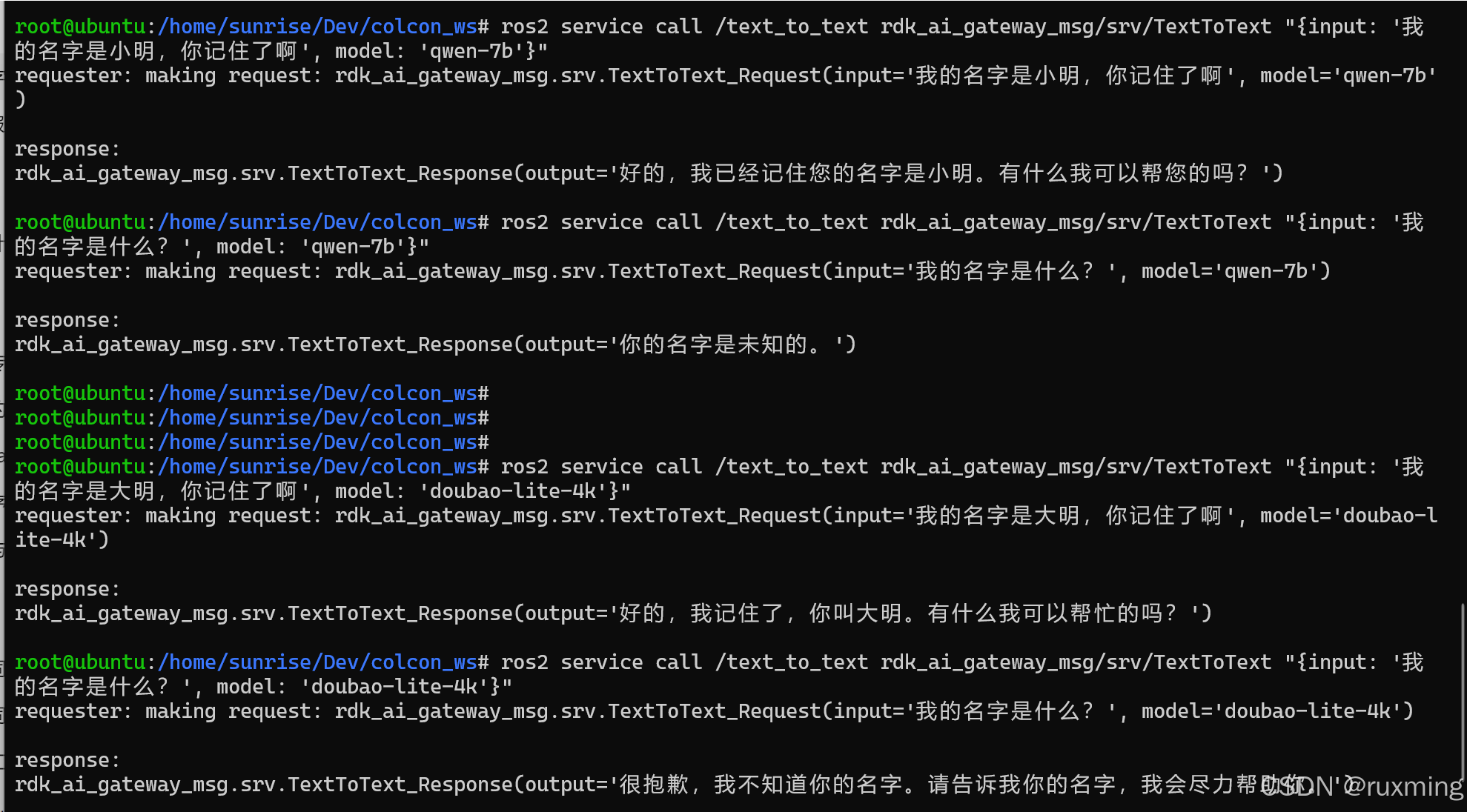
发现默认调用,并没有记忆能力。
需要修改开源代码。
~~~~~
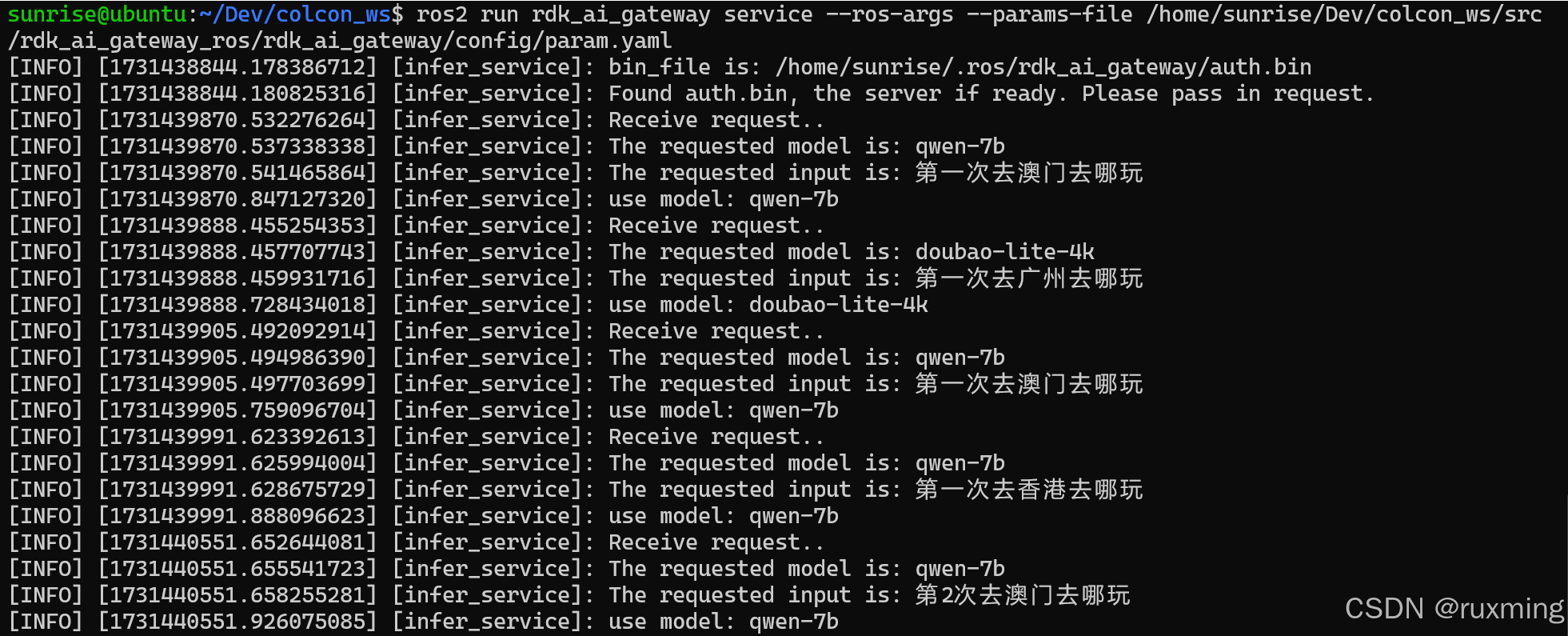
c)两台x5 的IP要互通,否则会有错误。
服务要启动。每一次都要输入社区名字和密码。否则有错误。
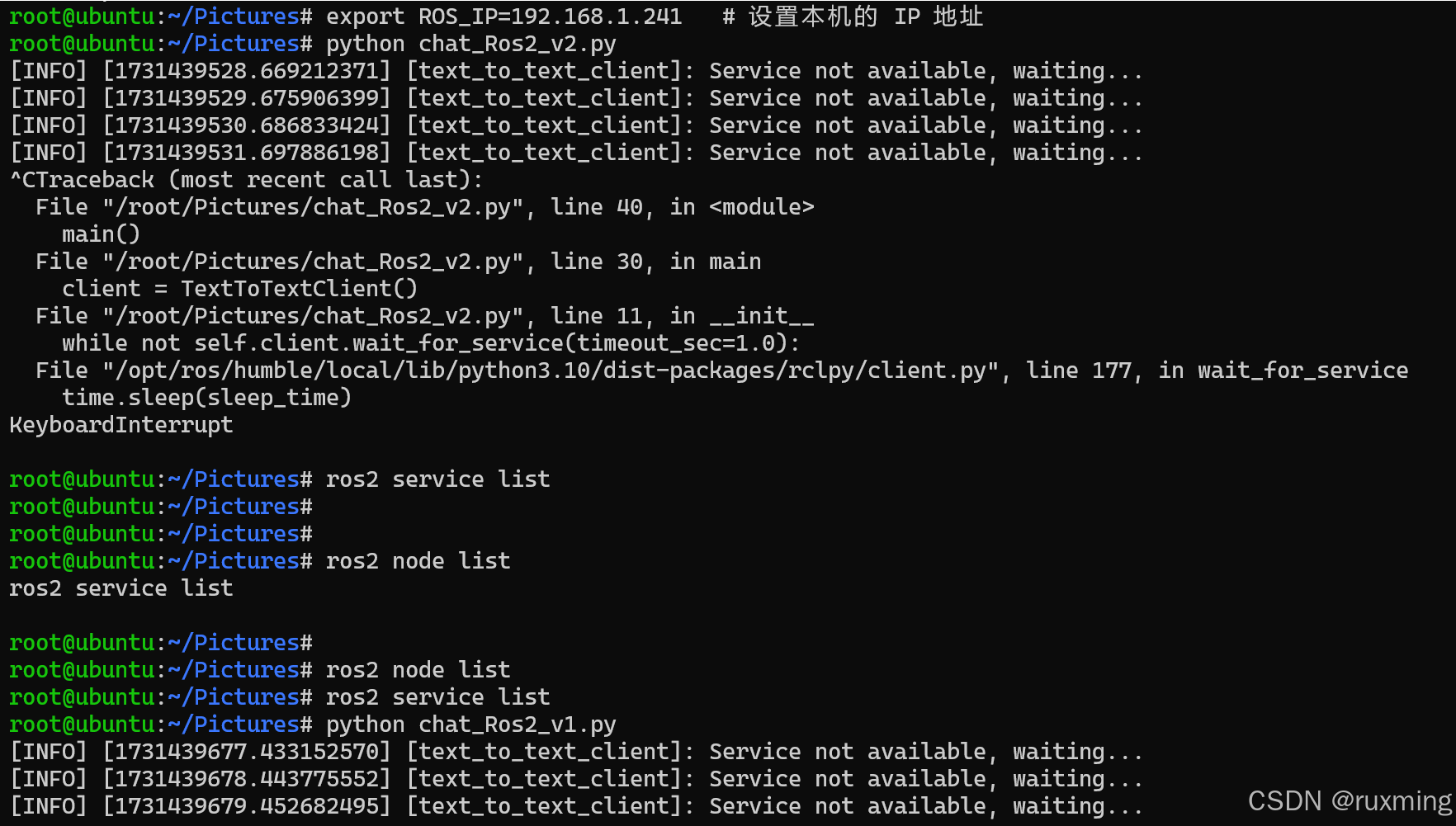
c)沟通通讯在局域网的另一台x5:
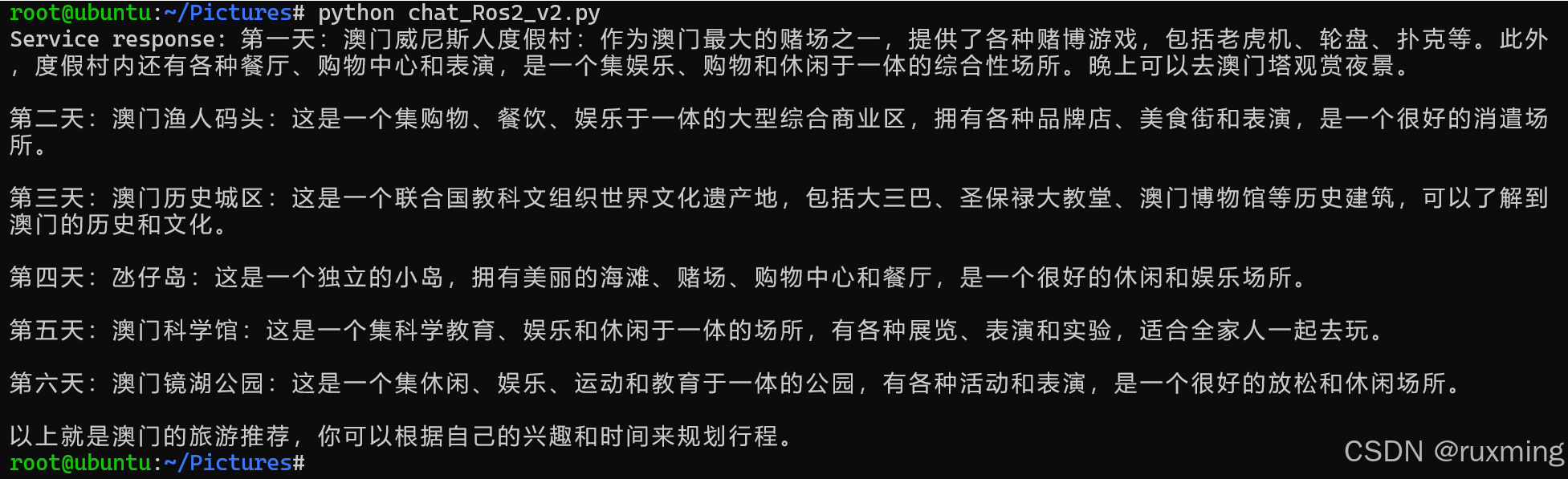
c)通过Python方式调用ros,并获得另一台x5的回答:
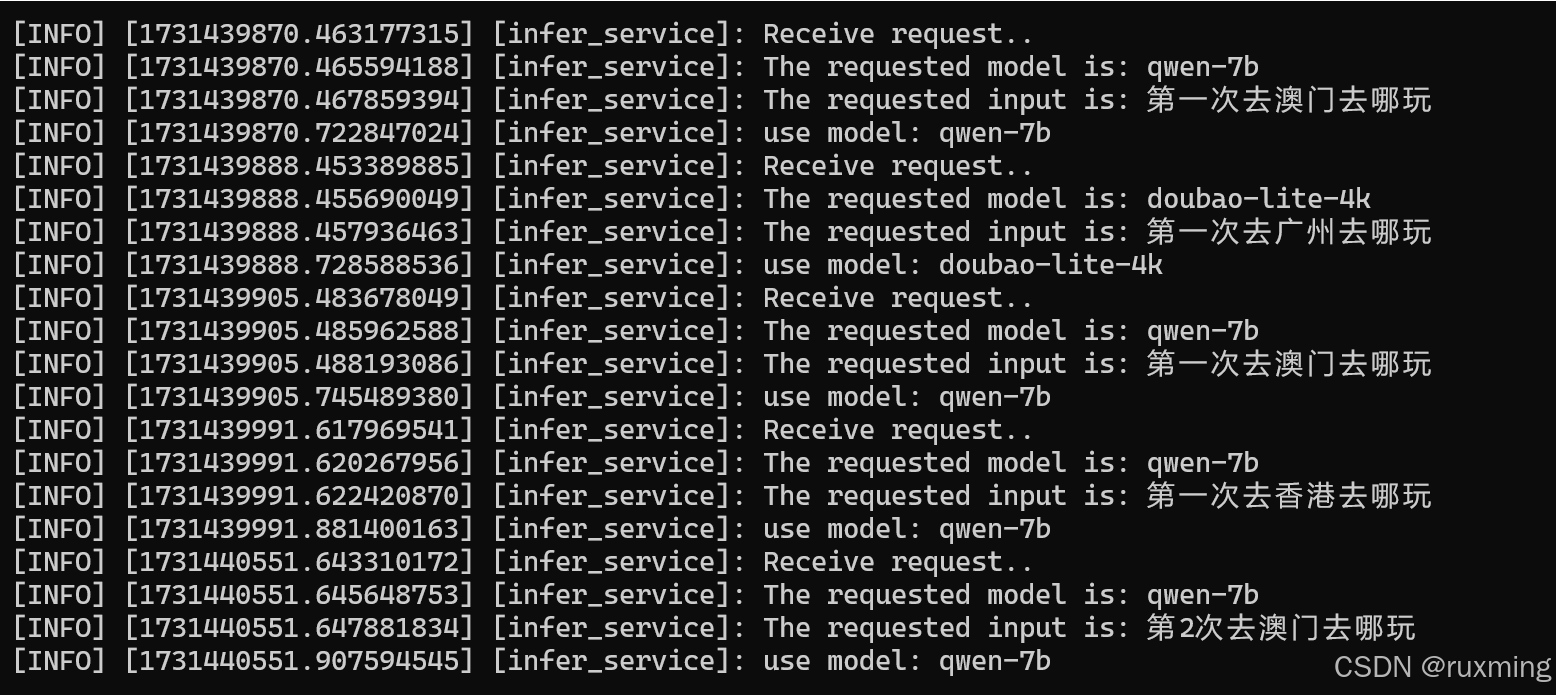
c)在另一台x5启动了服务,看到client的数据请求。
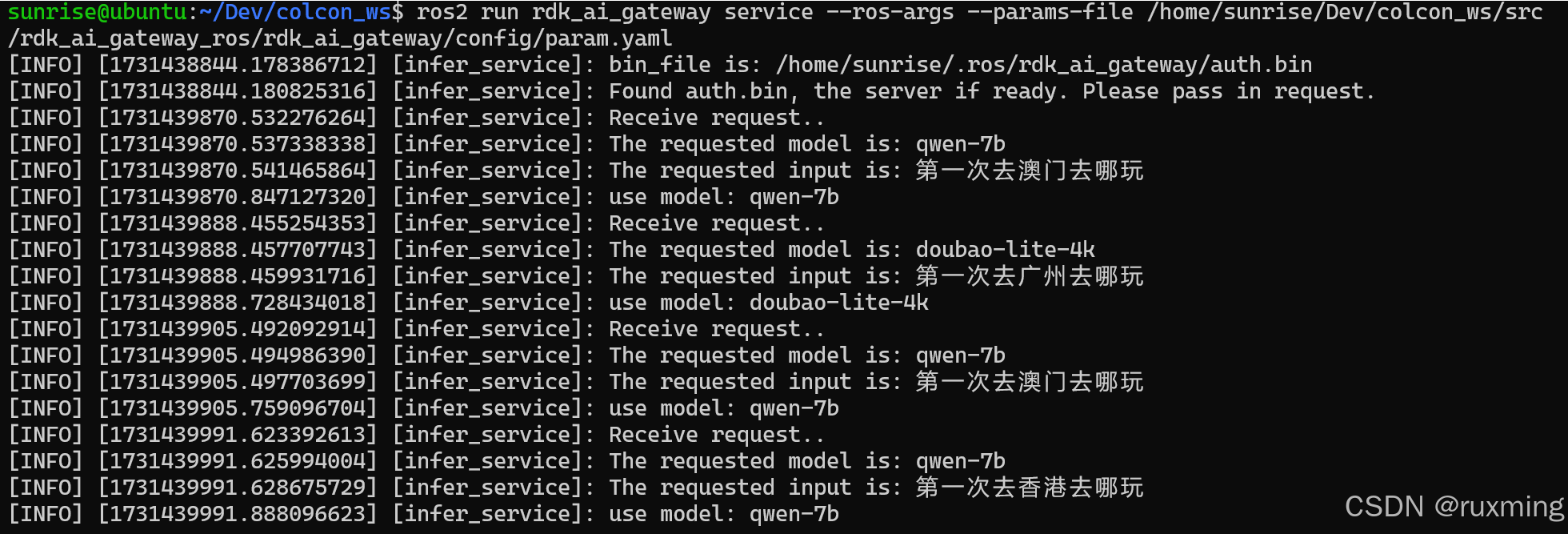
不同模型的被调用:
总结:
开发者和极客使用 RDK x5 进行 语义试验是一种便捷的享受。
实现不同系统或设备之间的有效沟通显得尤为重要。本文将深入探讨如何实现两台x5设备之间的沟通,具体来说,我们将着重研究以下两个方面:
a)如何将原本在命令行界面中执行的调用操作转化为Python语言中的调用操作。
为了实现这一目标,首先需要了解命令行界面(CLI)和Python脚本之间的基本差异。命令行界面通常依赖于一系列预定义的命令和参数,用户通过输入这些命令来执行特定的操作。而Python作为一种高级编程语言,提供了更为灵活和强大的编程能力,允许开发者编写复杂的逻辑和算法。
命令行调用转化为Python调用,目的是可以将命令行调用转化为更为复杂和灵活的Python调用。
b)探讨了x5设备是否支持个性化沟通方式。
在设备间的沟通中,个性化是一个重要的考量因素。个性化沟通意味着设备能够根据用户的特定需求和偏好来调整其沟通方式。
首先,x5设备需要具备识别用户偏好和需求的能力。这可以通过用户配置文件、历史交互记录或机器学习算法来实现。例如,如果用户经常在特定时间段与另一台x5设备进行沟通,系统可以自动在这些时间段内优先处理相关的沟通请求。
为了实现个性化沟通,x5设备之间的沟通协议和标准也需要具备一定的灵活性。这意味着设备间沟通时,要遵循通用的协议标准。
x5还要能够根据用户的个性化需求进行适当的调整和优化,这方面可以有更大的提高空间。
综上所述,通过将命令行调用转化为Python调用,以及实现个性化沟通方式的支持,我们可以显著提升两台x5设备之间的沟通效率和用户体验。这不仅有助于设备间的高效协作,还能满足用户在不同场景下的沟通需求。

















 2429
2429

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









