









目前用的比较多的camera-2d-lidar开源框架除了旷视的CamLaserCalibraTool就是autoware了。这些框架多多少少都有些安装与测试的小bug,因此特地写一篇博客记录一下同时让大家少踩坑。
这篇介绍的是autoware的版本,简单实用。【100%亲测能用,有问题留言,必回复解决】
本人系统配置
ubuntu 18.04
ros melodic
cmake 1.10
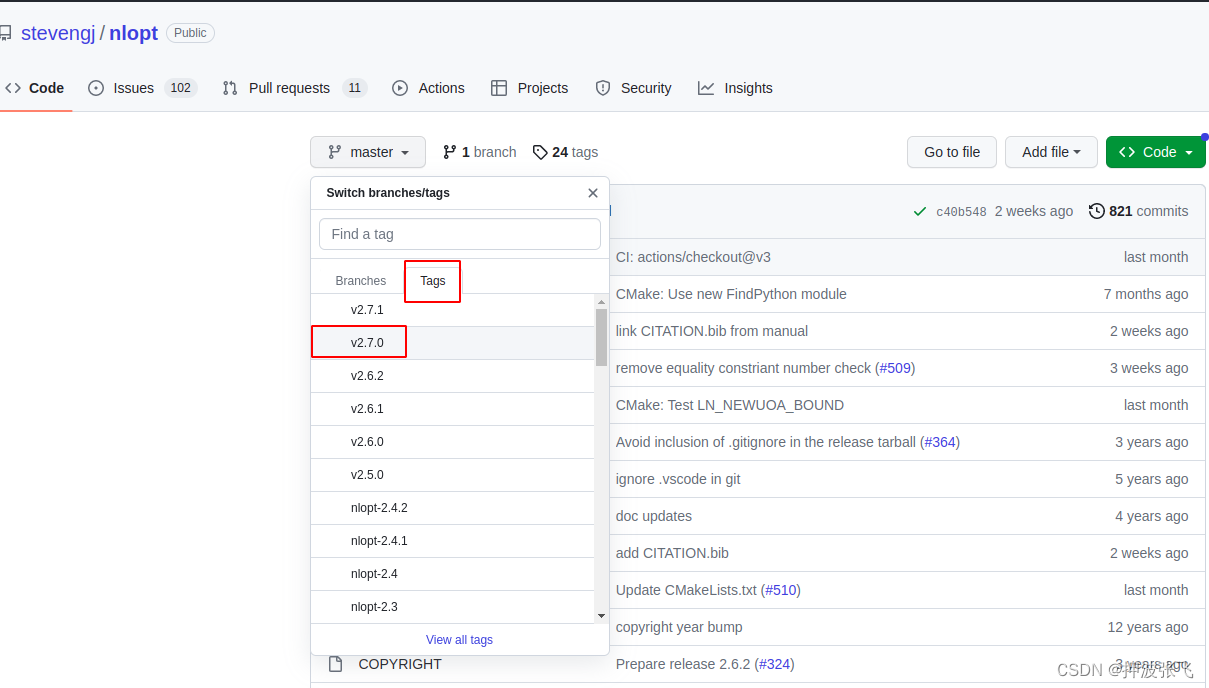
1、nlopt安装
nlopt推荐下载2.7.0版本的,太高了会出现cmake版本问题。
代码链接:点击在此
安装命令如下:
cd nlopt
mkdir build
cd build
cmake ..
make
sudo make install
之后安装ros匹配的库
sudo apt-get install ros-melodic-nlopt
2、Autoware的分支Calibration_Camera_Lidar安装
autoware的标定包有2个版本,这里采用的是旧版本的包,好用易上手。从autoware中分离出来的。
不需要下载autoware。代码见github
git clone git@github.com:aibo-Ryan/calibration_camera_lidar.git
创建一个ros空间
mkdir -p catkin_ws/src
cd catkin_ws/src
git clone git@github.com:aibo-Ryan/calibration_camera_lidar.git
cd ..
catkin_make
source devel/setup.bash
rosrun calibration_camera_lidar calibration_toolkit

















 65
65











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











