







系列文章目录
【附带源码】机械臂MoveIt2极简教程(一)、moveit2安装
【附带源码】机械臂MoveIt2极简教程(二)、move_group交互
【附带源码】机械臂MoveIt2极简教程(三)、URDF/SRDF介绍
【附带源码】机械臂MoveIt2极简教程(四)、第一个入门demo
【附带源码】机械臂MoveIt2极简教程(五)、第二个demo - rviz可视化
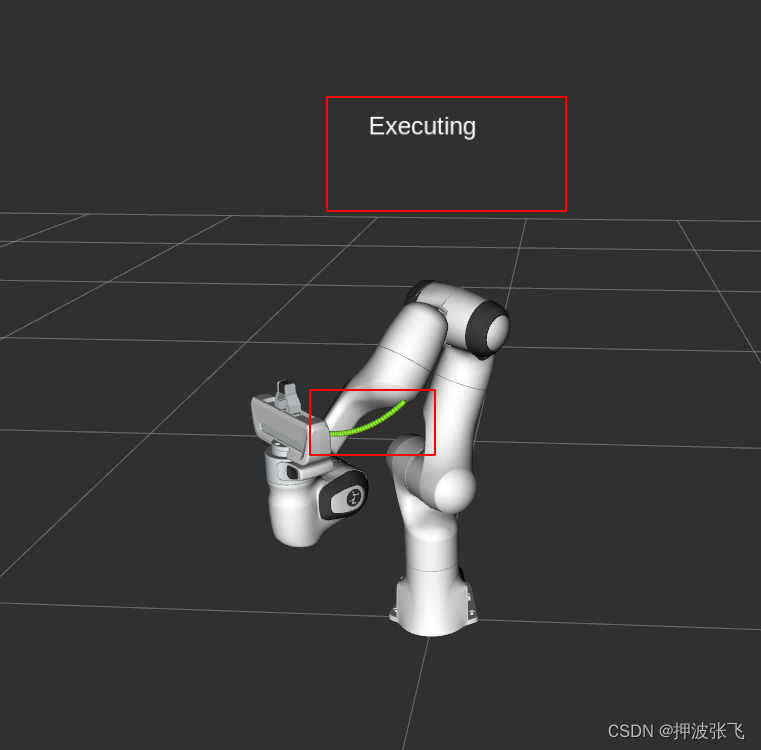
本节实现的效果就是在rviz中添加文字和机械臂运动轨迹画图。
机械臂MoveIt2极简教程(五)、rviz可视化
本节demo不另外创建package包,直接在上一节的demo_moveit包中运行。做的改动包括三个
- 新建C++代码
- 修改launch文件的Node
- 修改CMakeLists.txt
1. 新建C++代码
注意代码中两个地方的修改,一个是MoveGroupInterface传入的机械臂名称叫panda_arm;另一个是MoveItVisualTools中传入的tf link名称叫panda_link0。如果这两个地方没有和机械臂本体对应上,那么rviz中无法显示你需要的文字和路径图标。
#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("visualize_in_rviz", rclcpp::NodeOptions().automatically_declare_parameters_from_overrides(true));
rclcpp::executors::SingleThreadedExecutor executors;
executors.add_node(node);
std::thread([&executors]()
{ executors.spin(); })
.detach();
auto const logger = rclcpp::get_logger("visualize_in_rviz");
RCLCPP_INFO(logger, "start ");
auto move_group = moveit::planning_interface::MoveGroupInterface(node, "panda_arm");
auto moveit_visual_tools = moveit_visual_tools::MoveItVisualTools(node, "panda_link0", rviz_visual_tools::RVIZ_MARKER_TOPIC, move_group.getRobotModel());
moveit_visual_tools.deleteAllMarkers();
moveit_visual_tools.loadRemoteControl();
auto const draw_title = [&moveit_visual_tools](auto text)
{
auto const text_pose = []
{
auto msg = Eigen::Isometry3d::Identity();
msg.translation().z() = 1.0; // Place text 1m above the base link
return msg;
}();
moveit_visual_tools.publishText(text_pose, text, rviz_visual_tools::WHITE,
rviz_visual_tools::XLARGE);
};
auto const prompt = [&moveit_visual_tools](auto text)
{
moveit_visual_tools.prompt(text);
};
auto const draw_trajectory_tool_path =
[&moveit_visual_tools,
jmg = move_group.getRobotModel()->getJointModelGroup(
"panda_arm")](auto const trajectory)
{
moveit_visual_tools.publishTrajectoryLine(trajectory, jmg);
};
// Set a target Pose
auto const target_pose = []
{
geometry_msgs::msg::Pose msg;
msg.orientation.w = 1.0;
msg.position.x = 0.28;
msg.position.y = -0.2;
msg.position.z = 0.5;
return msg;
}();
move_group.setPoseTarget(target_pose);
// Create a plan to that target pose
prompt("Press 'Next' in the RvizVisualToolsGui window to plan");
draw_title("Planning");
moveit_visual_tools.trigger();
auto const [success, plan] = [&move_group]
{
moveit::planning_interface::MoveGroupInterface::Plan msg;
auto const ok = static_cast<bool>(move_group.plan(msg));
return std::make_pair(ok, msg);
}();
// Execute the plan
if (success)
{
draw_trajectory_tool_path(plan.trajectory_);
moveit_visual_tools.trigger();
prompt("Press 'Next' in the RvizVisualToolsGui window to execute");
draw_title("Executing");
moveit_visual_tools.trigger();
move_group.execute(plan);
}
else
{
draw_title("Planning Failed!");
moveit_visual_tools.trigger();
RCLCPP_ERROR(logger, "Planning failed!");
}
rclcpp::shutdown();
return 0;
}
2. 修改launch文件
沿用上一节的launch文件demo_moveit.launch.py
import os
import yaml
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
import xacro
def load_file(package_name, file_path):
package_path = get_package_share_directory(package_name)
absolute_file_path = os.path.join(package_path, file_path)
try:
with open(absolute_file_path, "r") as file:
return file.read()
except EnvironmentError: # parent of IOError, OSError *and* WindowsError where available
return None
def load_yaml(package_name, file_path):
package_path = get_package_share_directory(package_name)
absolute_file_path = os.path.join(package_path, file_path)
try:
with open(absolute_file_path, "r") as file:
return yaml.safe_load(file)
except EnvironmentError: # parent of IOError, OSError *and* WindowsError where available
return None
def generate_launch_description():
robot_description_config = xacro.process_file(
os.path.join(
get_package_share_directory("moveit_resources_panda_moveit_config"),
"config",
"panda.urdf.xacro",
)
)
robot_description = {"robot_description": robot_description_config.toxml()}
robot_description_semantic_config = load_file(
"moveit_resources_panda_moveit_config", "config/panda.srdf"
)
robot_description_semantic = {
"robot_description_semantic": robot_description_semantic_config
}
kinematics_yaml = load_yaml(
"moveit_resources_panda_moveit_config", "config/kinematics.yaml"
)
# 第四节
# move_group_demo = Node(
# package="demo_moveit",
# executable="demo_moveit",
# name="demo_moveit",
# output="screen",
# parameters=[robot_description,
# robot_description_semantic,
# kinematics_yaml,
# ],
# )
# 第五节
move_group_demo = Node(
package="demo_moveit",
executable="visualize_in_rviz",
name="visualize_in_rviz",
output="screen",
parameters=[robot_description,
robot_description_semantic,
kinematics_yaml,
],
)
return LaunchDescription([move_group_demo])
3. 修改CMakeLists.txt
依旧沿用上一节的CMakeLists.txt,只是添加了新的节点
cmake_minimum_required(VERSION 3.10.2)
project(demo_moveit)
# Common cmake code applied to all moveit packages
find_package(moveit_common REQUIRED)
moveit_package()
find_package(Eigen3 REQUIRED)
find_package(Boost REQUIRED system filesystem date_time thread)
find_package(ament_cmake REQUIRED)
find_package(control_msgs REQUIRED)
find_package(moveit_core REQUIRED)
find_package(moveit_ros_planning REQUIRED)
find_package(moveit_ros_planning_interface REQUIRED)
find_package(moveit_ros_perception REQUIRED)
find_package(moveit_servo REQUIRED)
find_package(interactive_markers REQUIRED)
find_package(rviz_visual_tools REQUIRED)
find_package(moveit_visual_tools REQUIRED)
find_package(geometric_shapes REQUIRED)
find_package(rclcpp REQUIRED)
find_package(rclcpp_action REQUIRED)
find_package(pluginlib REQUIRED)
find_package(tf2_ros REQUIRED)
find_package(tf2_eigen REQUIRED)
find_package(tf2_geometry_msgs REQUIRED)
set(THIS_PACKAGE_INCLUDE_DIRS
doc/interactivity/include
)
set(THIS_PACKAGE_INCLUDE_DEPENDS
ament_cmake
rclcpp
rclcpp_action
tf2_geometry_msgs
tf2_ros
moveit_core
rviz_visual_tools
moveit_visual_tools
moveit_ros_planning_interface
interactive_markers
tf2_geometry_msgs
moveit_ros_planning
pluginlib
Eigen3
Boost
control_msgs
moveit_servo
)
include_directories(${THIS_PACKAGE_INCLUDE_DIRS})
ament_export_dependencies(
${THIS_PACKAGE_INCLUDE_DEPENDS}
)
ament_export_include_directories(include)
# -------------------------------------------------------------- executable
add_executable(demo_moveit
src/demo_moveit.cpp)
target_include_directories(demo_moveit
PUBLIC include)
ament_target_dependencies(demo_moveit
${THIS_PACKAGE_INCLUDE_DEPENDS} Boost)
# -------------------------------------------------------------- executable
add_executable(visualize_in_rviz
src/visualize_in_rviz.cpp)
target_include_directories(visualize_in_rviz
PUBLIC include)
ament_target_dependencies(visualize_in_rviz
${THIS_PACKAGE_INCLUDE_DEPENDS} Boost)
# -------------------------------------------------------------- install
install(TARGETS demo_moveit visualize_in_rviz planning_around_objects
DESTINATION lib/${PROJECT_NAME}
)
install(DIRECTORY launch
DESTINATION share/${PROJECT_NAME}
)
ament_package()
4. 运行
- 进入工作空间,编译项目
cd ~/ws_moveit
colcon build --cmake-args -DCMAKE_BUILD_TYPE=Release --packages-select demo_moveit
- 启动panda_arm机械臂
ros2 launch moveit2_tutorials demo.launch.py
- 记得先把MotionPlanning关闭,因为目前用不到;
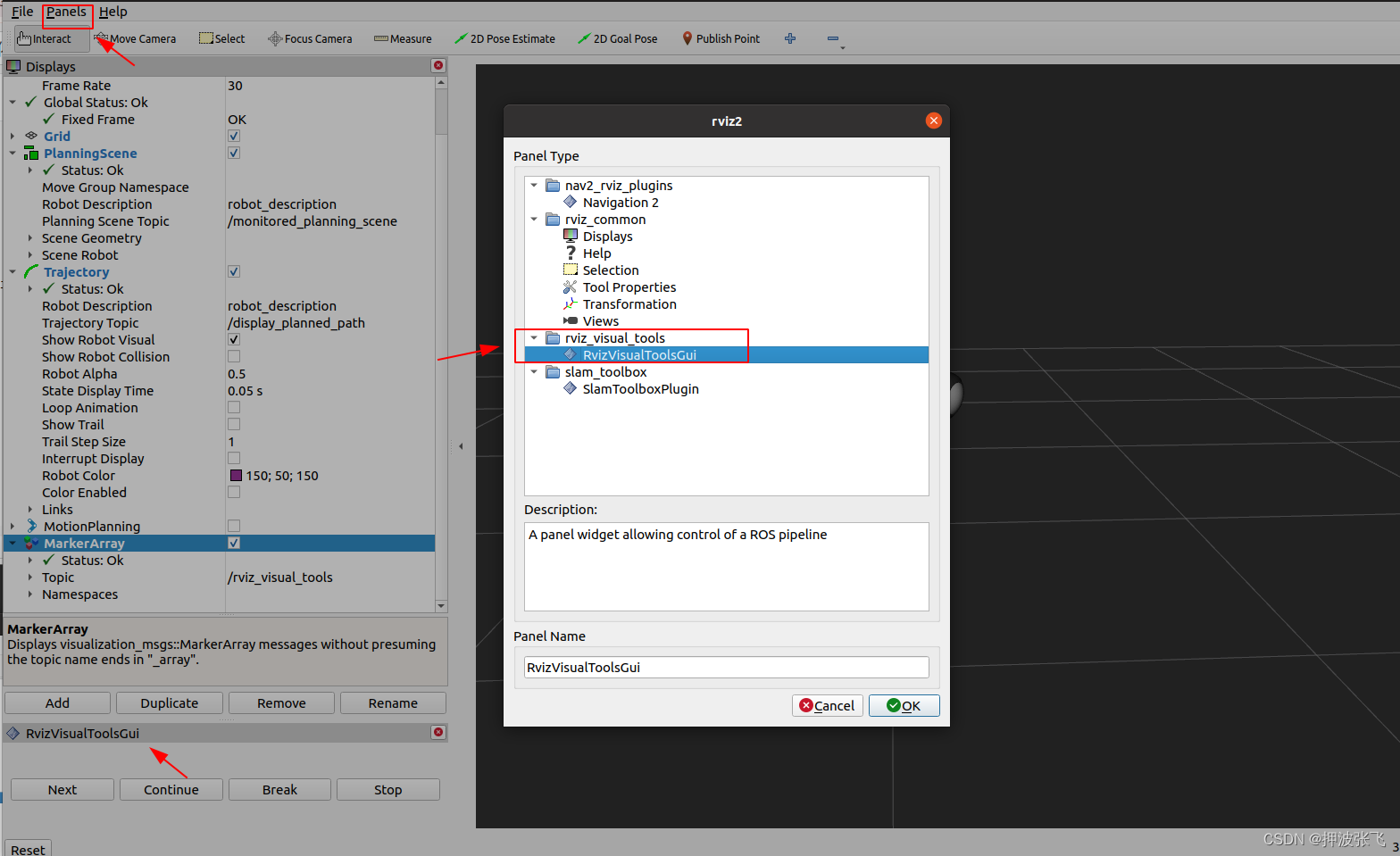
- 添加插件RvizVisualToolsGui
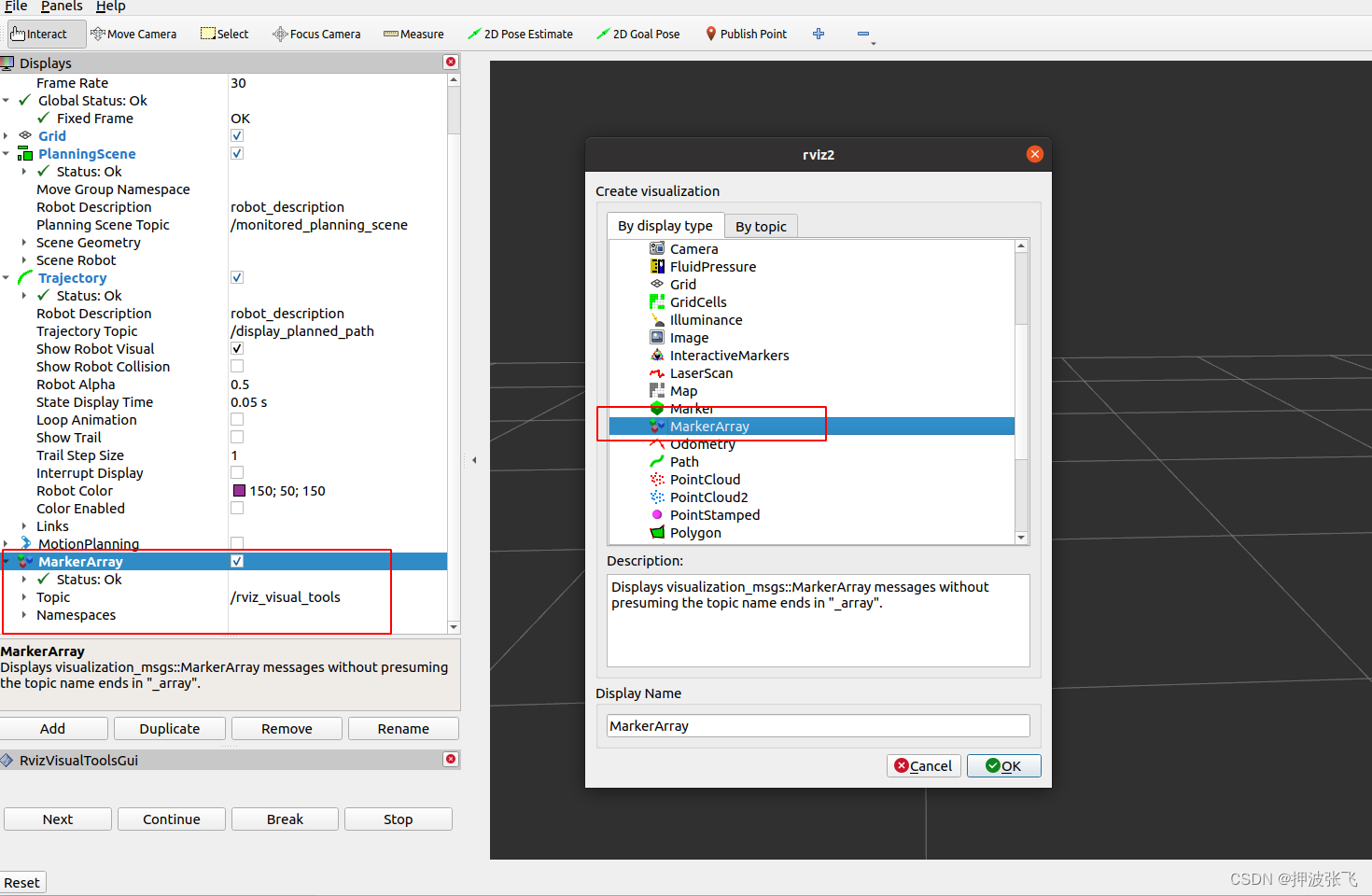
- 添加MarkerArray,topic选择/rviz_visual_tools
- 启动本节程序
ros2 launch demo_moveit demo_moveit.launch.py
- 点击RvizVisualToolsGui的Next按钮,即可看到机械臂运动动画,如文章开头的视频展示的一样。
觉得对您有帮助的,可以点个赞👍支持一下,谢谢各位!
因为淋过雨,所以想为别人撑把伞;因为踩过太多坑,所以想让喜欢机器人的同学们减少试错成本!

















 424
424

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











