






gp_Ax2
定义右手坐标系,若需要左手坐标系,则要使用gp_Ax3。
X Direction:X轴向量,gp_Dir
Y Direction:Y轴向量,gp_Dir
Direction(Main Direction):Z方向、主方向,此方向变动,X、Y自动变化。但是修改X Direction或Y Direction,主方向不会自动修改。
构造函数1
gp_Ax2()
默认坐标系,即
原点:(0,0,0)
X:(1,0,0)
Y:(0,1,0)
Z:(0,0,1)
构造函数2
gp_Ax2(const gp_Pnt& P, const gp_Dir& N, const gp_Dir& Vx);
P: 坐标原点。
N:主方向,Z方向。
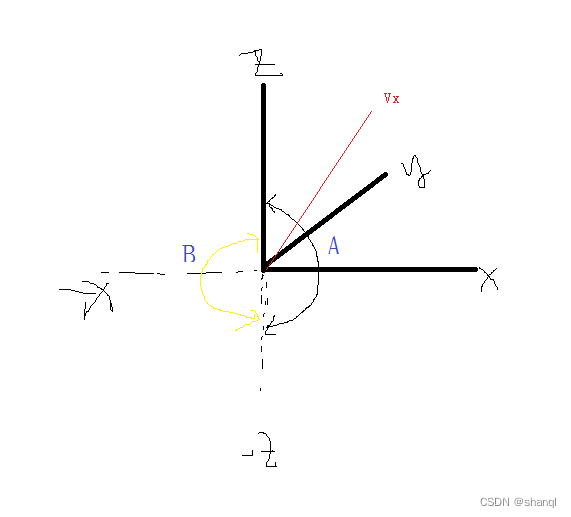
Vx: 由(N, Vx)共同定义X轴向量,X Direction = (N ^ Vx) ^ N。向量Vx若与N平行,则抛出异常。若与N垂直,则Vx即为X方向。
- 理解(N ^ Vx)^N
符号^表示叉积或外积,如下图,Vx在X0Z平面上,由(N ^ Vx) ^ N得出的结果为:当Vx在范围A时,结果为+X;当Vx在范围B时,结果为-X。
构造函数3
gp_Ax2(const gp_Pnt& P, const gp_Dir& V)
给定坐标系原点及Z方向,X、Y根据指定规则自动计算出。
P:坐标原点
V: Z方向或主方向














 9377
9377











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









