







1.常见的lose损失函数?
1.交叉熵损失函数:与softmax回归一起使用,输出为概率分布。
2.指数损失函数
3.平方损失函数(最小二乘法)
2.说清楚精确率与召回率:
精确率(precision)的公式是,它计算的是所有"正确被检索的item(TP)"占所有"实际被检索到的(TP+FP)"的比例.
召回率(recall)的公式是,它计算的是所有"正确被检索的item(TP)"占所有"应该检索到的item(TP+FN)"的比例。
目标检测算法
1. 单阶段和二阶段目标检测算法的区别?以yolo和RCNN为例
单阶段:速度快但精度较低;
二阶段: 精度高而速度较慢;
单阶段one-stage:
one-stage算法会直接在网络中提取特征来预测物体的特征和位置,一步到位。代表作:YOLO,SSD。
二阶段two-stage:
第一阶段:专注于找出目标物体出现的位置,得到建议框,保证足够的准确率和召回率;
第二阶段:专注于对建议框进行分类,寻找更精确的位置
代表作:R-CNN,Fast R-CNN ,Faster R-CNN。
one-stage代表 yolo算法
yolo 创造性的将物体检测任务当作回归问题(regression problem), 将候选区和检测两个阶段合二为一。
yolov1:
本文将检测变为回归问题,yolo从输入图像,仅仅通过一个 neural network, 直接得到检测框和每个检测框所属的类别的概率。正因为整个过程仅仅一个网络,所以可以直接进行端到端的优化。
Loss 损失函数
1. 对 focal loss的了解
正负样本不平衡带来的问题:
样本中存在大量负样本的简单样本,这样会让大量的简单负样本对loss起主要贡献,主导梯度的更新方向,网络无法对object进行精确分类。
Focal loss主要是为了解决one-stage目标检测中正负样本比例严重失衡的问题。该损失函数降低了大量简单负样本在训练中所占的权重,也可理解为一种困难样本挖掘。
1.1 首先面对正负样本不平衡的问题,为交叉熵增加一个权重alpha,用来平衡正负样本本事的比例不均,负样本越多比例越少;
原来:
修改为:
1.2 针对简单负样本和复杂负样本不平衡的问题,增加gamma因子,其中gamma>0使得减少简单样本的损失,使损失更关注于使得更关注于困难的、错分的样本。(因为简单样本比例很大,假设为0.9,那么1-0.9的值就会很小,导致最后对损失的影响也很小,这样还可以放大困难样本的影响)
定义损失函数:
最终,focal loss的形式为:

2.目标检测的损失函数有哪些?
目标检测中的损失函数通常由两部分组成:classification loss (分类损失)和 bounding box regression loss(定位损失)。
classification loss (分类损失)
2.1.1 交叉熵

交叉熵损失函数通过不断缩小两个分布的差异,使预测结果更可靠。
谷歌在交叉熵的基础上提出了Label Smoothing(标签平滑),解决over-confidence的问题。
Label Smoothing其实就是将原来的label取值范围从[0,1]改为 [ε,1-ε]
2.1.2 focal loss
主要是为了解决one-stage目标检测算法中正负样本比例严重失衡的问题,降低了大量简单负样本在训练中所占的比重。
focal loss的形式为:
首先面对正负样本不平衡的问题,为交叉熵增加一个权重alpha,用来平衡正负样本本事的比例不均,负样本越多比例越少;
针对简单负样本和复杂负样本不平衡的问题,增加gamma因子,其中gamma>0使得减少简单样本的损失,使损失更关注于使得更关注于困难的、错分的样本。(因为简单样本比例很大,假设为0.9,那么1-0.9的值就会很小,导致最后对损失的影响也很小,这样还可以放大困难样本的影响);
2.2.1目标定位损失—IoU
衡量目标检测定位性能的主要指标是交并比IoU。以往在设计损失函数时通常使用mse等损失函数来优化模型对目标的定位结果,但是不能很好地反应定位精度;
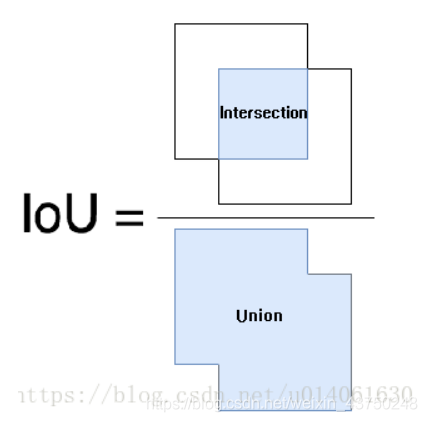
直接使用Iou衡量目标定位损失函数:

优点:尺度不变性
存在问题:相同的IOU不能代表检测框的定位效果相同;当两个框没有相交,则IOU=0不能反应两个框的距离,此时损失函数不存在梯度,无法通过梯度下降进行训练
2.2.2 目标定位损失—GIoU
GIOU的提出:
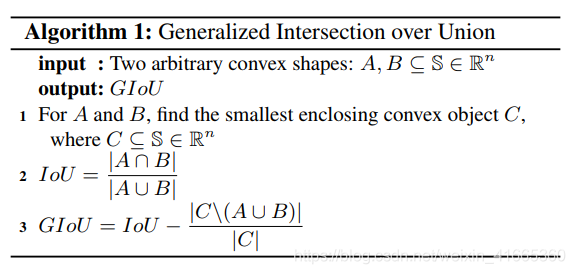
IoU反映了两个框的重叠程度,在两个框不重叠时,IoU衡等于0,此时IoU loss恒等于1。而在目标检测的边界框回归中,这显然是不合适的。因此,GIoU loss在IoU loss的基础上考虑了两个框没有重叠区域时产生的损失。具体定义如下:

其中,C表示两个框的最小包围矩形框,R(P,G)是惩罚项。从公式可以看出,当两个框没有重叠区域时,IoU为0,但R依然会产生损失。极限情况下,当两个框距离无穷远时,R→1
I
o
U
=
∣
A
∩
B
∣
∣
A
∪
B
∣
IoU=\frac{|A\cap B|}{|A\cup B|}
IoU=∣A∪B∣∣A∩B∣
G
I
o
U
=
I
o
U
−
∣
C
\
(
A
∪
B
)
∣
∣
C
∣
GIoU=IoU-\frac{|C\backslash(A\cup B)|}{|C|}
GIoU=IoU−∣C∣∣C\(A∪B)∣
GIOU的优势:
1.首先可以实现较全场景以类IoU Loss为目标直接优化,使得优化目标和最终的评估目标一致。由于IoU Loss的关键问题在于当两个物体没有交集的时候,它就退化为常数1,失去优化目标
2.相比于传统的回归loss,它具备尺度不变形
3.极限情况下,GIoU(A,B) = IoU(A, B)
2.2.3 DIoU Loss
IoU loss和GIoU loss都只考虑了两个框的重叠程度,但在重叠程度相同的情况下,我们其实更希望两个框能挨得足够近,即框的中心要尽量靠近。因此,DIoU在IoU loss的基础上考虑了两个框的中心点距离,具体定义如下:

其中,ρ表示预测框和标注框中心端的距离,p和g是两个框的中心点。c表示两个框的最小包围矩形框的对角线长度。当两个框距离无限远时,中心点距离和外接矩形框对角线长度无限逼近,R→1
下图直观显示了不同情况下的IoU loss、GIoU loss和DIoU loss结果:
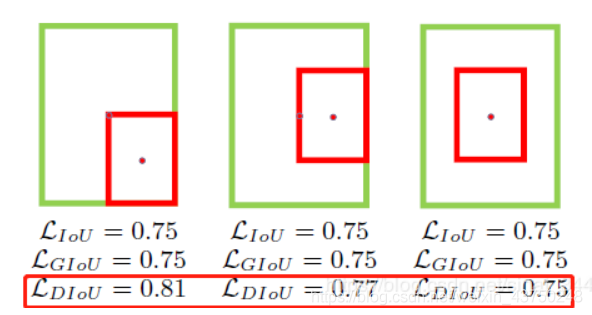
其中,绿色框表示标注框,红色框表示预测框,可以看出,最后一组的结果由于两个框中心点重合,检测效果要由于前面两组。IoU loss和GIoU loss的结果均为0.75,并不能区分三种情况,而DIoU loss则对三种情况做了很好的区分。
2.2.4 CIoU Loss
DIoU loss考虑了两个框中心点的距离,而CIoU loss在DIoU loss的基础上做了更详细的度量,具体包括:
重叠面积
中心点距离
长宽比
因此,进一步在DIoU的基础上提出了CIoU。其惩罚项如下面公式:
其中 ɑ 是权重函数:
而 v 用来度量长宽比的相似性,定义为:

2.2.5 L1(MAE)
L1损失函数:
L1损失函数对x的导数为常数,不会有梯度爆炸的问题,但其在0处不可导,在较小损失值时,得到的梯度也相对较大,可能造成模型震荡不利于收敛。
2.2.6 L2(MSE)
L2损失函数:
L2损失函数处处可导,但由于采用平方运算,当预测值和真实值的差值大于1时,会放大误差。尤其当函数的输入值距离中心值较远的时候,使用梯度下降法求解的时候梯度很大,可能造成梯度爆炸。同时当有多个离群点时,这些点可能占据Loss的主要部分,需要牺牲很多有效的样本去补偿它,所以L2 loss受离群点的影响较大。
2.2.7 smooth L1损失函数

smooth L1完美的避开了L1和L2损失的缺点:
在[-1,1]之间就是L2损失,解决L1在0处有折点
在[-1, 1]区间以外就是L1损失,解决离群点梯度爆炸问题
当预测值与真实值误差过大时,梯度值不至于过大
当预测值与真实值误差很小时,梯度值足够小
上述三个损失函数(L1(MAE),L2(MSE),smooth L1损失函数)在计算bounding box regression loss时,是独立的求4个点的loss,然后相加得到最终的损失值,这种做法的前提是四个点是相互独立的,而实际上是有一定相关性的
实际评价检测结果好坏的指标是IoU,这两者是不等价的,多个检测框可能有相同的loss,但IoU差异很大。
训练策略
1. 训练过程中类别不平衡怎么办?怎么解决的?
1. 从采样的策略上: 通过采样方法将不平衡的数据集变为平衡的数据集,优点是简单方便。具体分为过采样和欠采样。
过采样 :将小份的样本复制多份。
这样可能会造成训练出的模型有一定过拟合。
欠采样:将大份的样本中筛选一部分作为数据集,等于丢弃部分训练集的数据,也可能会造成过拟合。
可以采用3个方法减少欠采样带来的损失。
1.1 EasyEnsemble :利用模型融合的方法,多次欠采样产生多个数据集,从而训练多个模型,综合多个模型的结果作为最终的结果
1.2 BalanceCascade: 利用增量训练的思想,先利用欠采样产生的训练集训练一个分类器,然后对分类正确的样本从总训练集中筛除,再次在剩余的数据集利用欠采样训练第二个分类器,最终结合所有的分类器结果作为最终结果。
1.3 NearMiss:利用KNN试图挑选那些最具代表性的大众样本。
2. 图像增强:通过某种手段,利用已有的样本人工合成少数类样本,从而达到类别平衡的目的。
常规的图像增强方法有: 缩放,旋转,翻转,偏移等。
还有根据场景化定制的一些图像增强方法:增加噪声,滤波操作(模糊),调节亮度/对比度
3. 加权操作:通过加权的方式解决数据不平衡的问题,在设计损失函数时,为少数类样本赋予更大的权值,为多数类样本赋予更小的权值。
例如: focal loss
4. 调整输出阈值:当类别不平衡时,采用默认的分类阈值可能会导致输出全部为反例,产生虚高的准确度,导致分类失败。因此,可以选择调整阈值,使得模型对于较少的类别更为敏感。
2. 采集数据集时需要注意什么
2.1 注意避免正负样本不均衡
2.2 注意在多个类之间保持一个数量均衡
2.3 场景多样性:尽可能采集需求范围内各种场景下的数据
例如:检测器是在户外进行检测的,则采集的数据尽可能的包含白天,晚上,雨天,晴天等场景;
2.4 目标多样性:尽可能收集需求范围内各种状态下的目标
2.4 采集数据的设备尽量与后期检测的设备,或者图像输入尺寸保持一致,要避免差异过大;
2.5 把握标注质量,在最后对数据集的人工标注能有一个严格的质量把关;
2.6 条件困难的情况下,可以采用互联网的数据集加上现场人工采集的数据集进行一定组合再进行训练,可以减少人工成本;
网络介绍
3.MobileNet
mobilenet是Google提出的。
优点:体积小,计算量小,适用于移动设备的卷积神经网络。
可以实现分类/目标检测/语义分割;
小型化:
- 卷积核分解,使用1xN和Nx1的卷积核替换NxN的卷积核。
- 采用bottleneck结构 ,以SqueezeNet为代表
- 以低精度浮点数保存,例如Deep Compression
- 冗余卷积核剪枝及哈弗曼编码。
。
mobilenet v1:
参考了传统的VGGNet等链式架构,都以层叠卷积层的方式提高网络深度,从而提高识别精度。缺点:梯度弥散现象。
(梯度弥散:导数的链式法则,连续多层小于1的梯度会使梯度越来越小,最终导致某层梯度为0)
要解决什么问题?
在现实场景中,诸如移动设备,嵌入式设备,自动驾驶等等,计算能力会受到限制,所以目标就是构建一个小且快速的模型。
用了什么方法解决问题(实现):
- 在MobileNet架构中,使用了深度可分离卷积替代传统卷积。
- 在MobileNet网络中引入两个收缩超参数:宽度因子,分辨率乘子。
还存在什么问题:
- MobileNet v1的结构过于简单,是类似于VGG的直筒结构,导致这个网络的性价比其实不高。如果引入后续的一系列ResNet,DenseNet等结构(复用图像特征,添加shortcuts)可以大幅提升网络的性能。
- 深度卷积存在潜在问题,训练后部分kernel权值为零。
深度可分卷积思想?
实质上就是将标准卷积分成了两步:depthwise卷积和pointwise卷积,其输入和输出都是相同的。
depthwise卷积:对每个输入通道单独使用一个卷积核处理。
pointwise卷积:1×1卷积,用于将depthwise的卷积的输出组合起来。
MoblieNet的大多数计算量(约95%)和参数(75%)都在1×1卷积中,剩余的大多数参数(约24%)都在全连接层中。由于模型较小,可以减少正则化手段和数据增强,因为小模型相对不容易过拟合。
关于mobilenet v2:
mobileNet v2主要引进了两个改动:Linear Bottleneck和Inverted Residual Blocks.
关于 Inverted Residual Blocks:
MobileNet v2结构基于inverted residual.其本质是一个残差网络设计,传统Residual block是block的两端channel通道数多,中间少;
而本文设计的inverted residual是block的两端channel通道数少,block内通道数多。另外保留了深度可分离卷积
关于Linear Bottlenecks:
感兴趣区域在ReLU之后保持非零,近似认为是线性变换;
ReLU能够保持输入信息的完整性,但仅限于输入特征位于输入空间的低维子空间。
对于低纬度空间处理,把ReLU近似为线性转换。
v1与v2对比:
相同点:
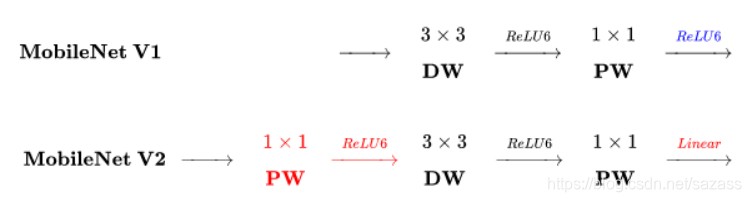
- 都采用Depth-wise(DW)卷积搭配Point-wise(PW)卷积的方式来提取特征。这两个操作合起来被称为Depth-wise Separable Convolution,之前在Xception中被广泛使用。这样做的好处就是理论上可以成倍减少卷积层的时间复杂度和空间复杂度。
不同点:
2. v2在DW卷积之前新加了一个PW卷积。这么做的原因是,因为DW卷积由于本身的计算特性决定它自己没有改变通道数的能力。上一层给它多少通道,它就要输出多少通道。所以如果上一层给的通道数本身很少的话,DW就只能在低维空间提取特征,因此效果不够好。
现在v2为了改善这个问题,给每个DW之前都匹配了一个PW,专门用来升维,定义升维系数为6,这样不管输入通道数是多是少,经过第一个PW升维之后,DW都是在相对的更高维进行辛勤工作的。
v2去掉了第二个pw的激活函数,作者称之为Linear Bottleneck。原因是作者认为激活函数在高维空间能够有效的增加非线性,而在低维空间则会破坏特征值,不如线性效果好。第二个PW主要功能就是降维,因此按照上面的理论,降维之后不宜再使用ReLU6.
总结mobileNet v2:
最难理解的就是Linear Bottlenecks,实现起来非常简单,就是在MobileNetv2机构中第二个PW后无ReLU6.对于低纬空间而言,进行线性映射会保留特征,而非线性映射会破坏特征。
mobileNet v3
高效的网络构建模块:
v3是神经架构搜索得到的模型,其内部使用的模块有:
1. v1模型引进的是深度可分离卷积;
2. v2引进的是具有线性瓶颈的倒残差结构;
3. 基于squeeze and excitation结构的轻量级注意力模型;
互补搜索:
在网络结构搜索中,作者结合两种技术:资源受限的NAS与NetAdapt,前者用于在计算和参数数量受限的前提下搜索网络的各个模块,所以称之为模块级搜索。
参考博客:
https://blog.csdn.net/weixin_41665360/article/details/100126744
https://blog.csdn.net/weixin_43750248/article/details/116656242
https://blog.csdn.net/a264672/article/details/122952162















 977
977











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









