







 本文详细介绍了DCGAN(深度卷积生成对抗网络)的理论,包括其结构改进、使用的技术如取消pooling层、BN层、特定激活函数等。通过实例展示了如何在PyTorch中实现DCGAN,以及在MNIST数据集上的训练效果。
本文详细介绍了DCGAN(深度卷积生成对抗网络)的理论,包括其结构改进、使用的技术如取消pooling层、BN层、特定激活函数等。通过实例展示了如何在PyTorch中实现DCGAN,以及在MNIST数据集上的训练效果。
DCGAN理论讲解:
论文地址:https://arxiv.org/abs/1511.06434
DCGAN就是将CNN和原始地GAN结合到一起,生成模型和判别模型都运用了深度卷积神经网络的生成对抗网络。DCGAN将CNN和GAN结合,奠定了之后几乎所有GAN的基本网络架构。 总之,DCGAN极大地提升了原始GAN训练地稳定性和生成结果质量。
DCGAN的改进之处:
1. DCGAN的生成器和判别器都舍弃了CNN的池化层,判别器保留CNN的整体架构,生成器则是将卷积层替换成了反卷积层(ConvTranspose2d)。
2. 在判别器和生成器中使用了Batch Normalization(BN)层,这有助于处理初始化不良导致的训练问题,加速模型训练,提升了训练的稳定性。
3. 在生成器中除输出层使用Tanh()激活函数,其余层全部使用ReLu激活函数。而在判别器中,除输出层外所有层都使用LeakyReLu激活函数,防止梯度稀疏。这一点我们已在基础GAN中使用。
DCGAN整体架构:

DCGAN的设计技巧:
1. 取消所有pooling层,G网络中使用转置卷积(transposed convolutional layer)进行上采样,D网络中加入stride的卷积(为防止梯度稀疏)代替pooling。
2. 去掉FC层(全连接),使网络变成全卷积网络。
3. G网络中使用Relu作为激活函数,最后一层用Tanh。
4. D网络中使用LeakyRelu激活函数。
5. 在generator和discriminator上都使用batchnorm,解决初始化差的问题,帮助梯度传播到每一层,防止generator把所有的样本都收敛到同一点。直接将BN应用到所有层会导致样本震荡和模型不稳定,因此在生成器的输出层和判别器的输入层不使用BN层,可以防止这种现象。
6. 使用Adam优化器。
7.参数参考论文: LeakyRelu的斜率是0.2 Learing rate = 0.0002 batch size是128。
运行结果:
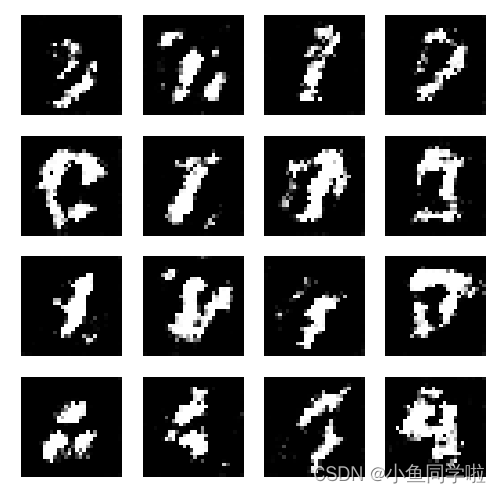
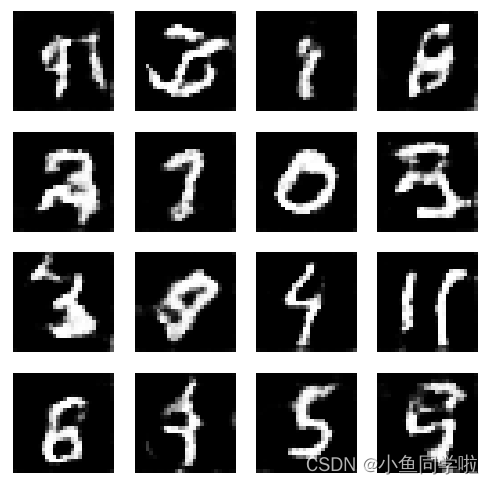
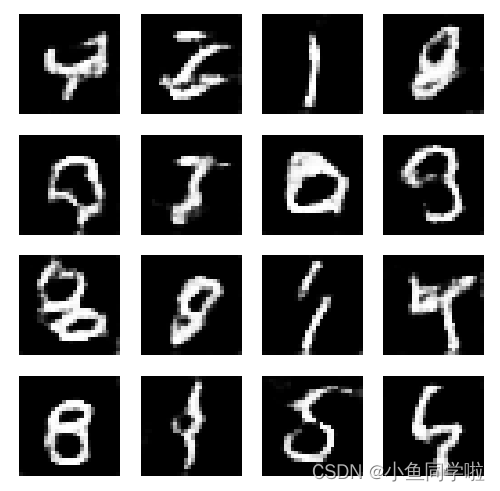
epoch=0 epoch=5 epoch=10
可以看到虽然只训练了10轮但是效果比原始GAN模型好很多,基本可以肉眼看出具体的数字了。
导入的库:
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import numpy as np
import matplotlib.pyplot as plt
import torchvision
from torchvision import transforms
from torch.utils.data import DataLoader数据准备(这里我们用的是手写数据集MNIST):
# 数据准备
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize(0.5, 0.5)
])
train_ds = torchvision.datasets.MNIST('data', train=True, transform=transform, download=True)
train_dl = DataLoader(train_ds, batch_size=4, shuffle=True)定义生成器(Generator):
# 生成器的初始化部分
# PS:1.输出层要用Tanh激活函数 2.使用batchnorm,解决初始化差的问题,帮助梯度传播到每一层,防止生成器包所有的样本都收敛到同一个点
class Generator(nn.Module):
def __init__(self):
super(Generator, self).__init__()
self.linear1 = nn.Linear(100, 256 * 7 * 7)
self.bn1 = nn.BatchNorm1d(256 * 7 * 7)
# 这里是反卷积,stride=2即让图像放大2倍,padding=2即往里缩小两格。
self.decon1 = nn.ConvTranspose2d(in_channels=256, out_channels=128,
kernel_size=(3, 3),
stride=1,
padding=1) # (128, 7, 7)
self.bn2 = nn.BatchNorm2d(128)
self.decon2 = nn.ConvTranspose2d(128, 64,
kernel_size=(4, 4),
stride=2,
padding=1) # (64, 14, 14)
self.bn3 = nn.BatchNorm2d(64)
self.decon3 = nn.ConvTranspose2d(64, 1,
kernel_size=(4, 4),
stride=2,
padding=1) # (1, 28, 28)
def forward(self, x):
x = F.relu(self.linear1(x))
x = self.bn1(x)
x = x.view(-1, 256, 7, 7)
x = F.relu(self.decon1(x))
x = self.bn2(x)
x = F.relu(self.decon2(x))
x = self.bn3(x)
x = torch.tanh(self.decon3(x))
return x定义判别器(Discriminator):
# 判别器的初始化部分
# PS:1.输入层不能用BN 2.用LeakyReLU激活函数 3.为了防止判别器过强而一边倒,用dropout降低其学习效果
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator, self).__init__()
self.conv1 = nn.Conv2d(in_channels=1, out_channels=64, kernel_size=3, stride=2)
self.conv2 = nn.Conv2d(in_channels=64, out_channels=128, kernel_size=3, stride=2)
self.bn = nn.BatchNorm2d(128)
self.fc = nn.Linear(128 * 6 * 6, 1)
def forward(self, x):
x = F.dropout2d(F.leaky_relu_(self.conv1(x))) # nn.LeakyReLU() 更适合作为模型的一部分使用,因为它会返回一个新的张量,而不会修改原始数据
x = F.dropout2d(F.leaky_relu_(self.conv2(x)))
x = self.bn(x)
x = x.view(-1, 128 * 6 * 6)
x = self.fc(x)
return x初始化模型,定义优化器,损失函数:
# 初始化模型,定义优化器,损失函数
device = 'cuda' if torch.cuda.is_available() else 'cpu'
gen = Generator().to(device)
dis = Discriminator().to(device)
g_optim = optim.Adam(gen.parameters(), lr=1e-4)
d_optim = optim.Adam(dis.parameters(), lr=1e-5) # PS:将判别器的学习率设置小一点可以减小其学习速度,防止一边倒
loss_fun = torch.nn.MSELoss()定义绘图函数:
# 定义绘图函数
test_input = torch.randn(16, 100, device=device)
def gen_img_plot(model, test_input):
prediction = np.squeeze(model(test_input).detach().cpu().numpy())
plt.figure(figsize=(4, 4))
for i in range(16):
plt.subplot(4, 4, i + 1)
plt.imshow((prediction[i] + 1) / 2, cmap="gray")
plt.axis("off")
plt.show()训练GAN:
# 训练GAN
G_loss = []
D_loss = []
for epoch in range(20):
g_epoch_loss = 0
d_epoch_loss = 0
count = len(train_dl)
for step, (img, _) in enumerate(train_dl):
img = img.to(device)
size = img.size(0)
random_noise = torch.randn(size, 100, device=device)
# 优化判别器
d_optim.zero_grad()
# 优化真实图片
real_output = dis(img)
real_loss = loss_fun(real_output, torch.ones_like(real_output, device=device))
real_loss.backward()
# 优化生成图片
gen_img = gen(random_noise)
fake_output = dis(gen_img.detach())
fake_loss = loss_fun(fake_output, torch.zeros_like(fake_output, device=device))
fake_loss.backward()
d_loss = real_loss + fake_loss
d_optim.step()
# 优化生成器
g_optim.zero_grad()
fake_output = dis(gen_img)
g_loss = loss_fun(fake_output, torch.ones_like(fake_output, device=device))
g_loss.backward()
g_optim.step()
with torch.no_grad():
d_epoch_loss += d_loss.item()
g_epoch_loss += g_loss.item()
with torch.no_grad():
d_epoch_loss /= count
g_epoch_loss /= count
D_loss.append(d_epoch_loss)
G_loss.append(g_epoch_loss)
print("Epoch:", epoch)
gen_img_plot(gen, test_input)
plt.plot(D_loss, label="D_loss")
plt.plot(G_loss, label="G_loss")
plt.legend()
plt.show()完整代码:
# 训练GAN
G_loss = []
D_loss = []
for epoch in range(20):
g_epoch_loss = 0
d_epoch_loss = 0
count = len(train_dl)
for step, (img, _) in enumerate(train_dl):
img = img.to(device)
size = img.size(0)
random_noise = torch.randn(size, 100, device=device)
# 优化判别器
d_optim.zero_grad()
# 优化真实图片
real_output = dis(img)
real_loss = loss_fun(real_output, torch.ones_like(real_output, device=device))
real_loss.backward()
# 优化生成图片
gen_img = gen(random_noise)
fake_output = dis(gen_img.detach())
fake_loss = loss_fun(fake_output, torch.zeros_like(fake_output, device=device))
fake_loss.backward()
d_loss = real_loss + fake_loss
d_optim.step()
# 优化生成器
g_optim.zero_grad()
fake_output = dis(gen_img)
g_loss = loss_fun(fake_output, torch.ones_like(fake_output, device=device))
g_loss.backward()
g_optim.step()
with torch.no_grad():
d_epoch_loss += d_loss.item()
g_epoch_loss += g_loss.item()
with torch.no_grad():
d_epoch_loss /= count
g_epoch_loss /= count
D_loss.append(d_epoch_loss)
G_loss.append(g_epoch_loss)
print("Epoch:", epoch)
gen_img_plot(gen, test_input)
plt.plot(D_loss, label="D_loss")
plt.plot(G_loss, label="G_loss")
plt.legend()
plt.show()
















 1359
1359

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









