







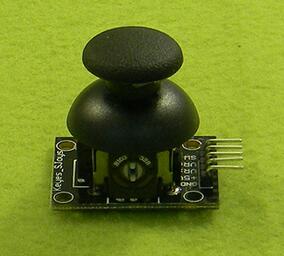
摇杆可以被视为一个按钮(Z轴)和电位计(X、Y轴)的组合。
接线方式:
GND、VCC(+5V)这两个不用说了。
VRx,VRy (X、Y轴)为模拟输入信号,连接到模拟IO口A0~A7。
VRx,VRy 的值:从 0 ~ 1023 分别代表 左~右,上~下。中间值为512。
SW (Z轴)是数字输入信号,连接到数字端口,并启用上拉电阻。
SW 的值:1代表未按下,0代表按下。
代码如下:
//在这里VRx(x)连的是模拟端口0,VRy(y)连的是模拟端口1,SW(z)连接到了数字端口7
int value = 0;
void setup() {
pinMode(7, INPUT_PULLUP); //注意 Z 轴输入一定要上拉,不然电平不稳。
Serial.begin(9600);
}
void loop() {
value = analogRead(A0);
Serial.print("X:");
Serial.print(value, DEC);
value = analogRead(A1);
Serial.print(" | Y:");
Serial.print(value, DEC);
value = digitalRead(7);
Serial.print(" | Z: ");
Serial.println(value, DEC);
delay(100);
}


















 1172
1172

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











