






作为机器人应用调试工程师,我们在现场调试机器人的时候,经常会需要手自动运行模式切换,测试程序bug,速度,加速度等相关设置,或者我们在手动移动程序指针后,希望切换到自动模式时,机器人能从当前的指针位置继续运行,但是,有些时候在机器人切换到自动模式时机器人示教器上却弹出下图所示提示:
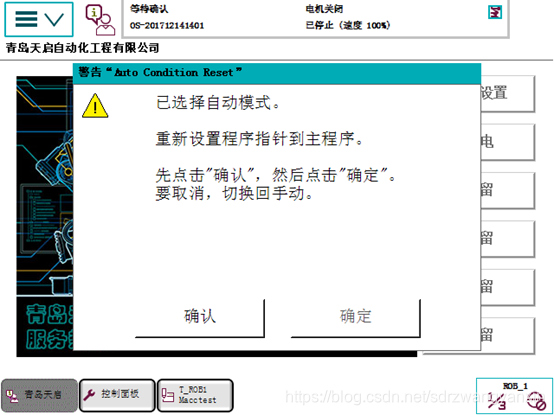
要重置指针到主程序?我想点击取消,取消在哪里?
有的机器人在切换自动模式时会弹出上图所示提示,我相信有的小伙伴也遇见过下面这个提示:
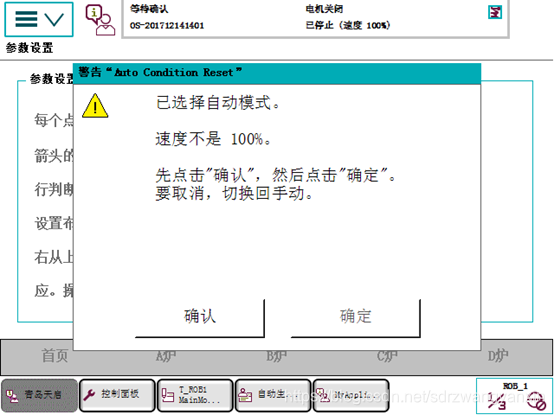
这个图所示的机器人就没有强制要求指针重置到主程序。
其实上面这两种效果通过机器人系统配置中的Controller主题下的Auto Condition Reset类型设置的。设置方法如下图所示:
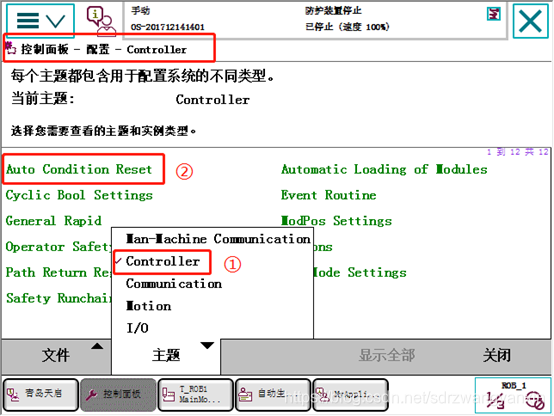


那么设置方法知道了,Auto Condition Reset有什么具体含义呢?
我们接着来看一下。
Auto Condition Reset定义了切换为自动模式时是否重置相关程序设置。在FlexPendant示教器上会显示一个消息框,在消息框中会提示会重置程序中的哪些内容。
Auto Condition Reset只有一个设定值——Reset,如果Reset被设置成YES,那么切换为自动时将重置以下条件:
• 如果调用链并非源自主例程,那么就把程序指针(PP)设置成所有任务的主程序。就是说如果不是人为修改指针的话。是不会影响指针的。
• 启用所有任务。
• 启动所有已停止的后台任务。
• 移除所有仿真I/O信号的仿真。
• 将速度设置成100%。
• 停用RAPID监视。
如果Reset被设置成NO,那么上述条件均不会自动重置。
如果正在运行某项服务例程,并在调用该服务例程前就将PP手动移到了其它例程处,
那么就不会采用上述内容,并在之后拒绝切换为自动。
那么知道了这些,我们就可以根据现场应用的需要来灵活更改他的设定值了。一般情况下在项目调试阶段可以将其值设为NO,以方便前期调试。到了后期设备移交客户使用的时候再将其值设为YES,强制每次切换到自动都要从主程序启动,以防止出现误操作的情况。
文章首发自动化生产之家


















 2371
2371

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









