






ABB机器人的ProgramEditor(程序编辑器)我想大家应该都不陌生吧。它可以称得上是我们在ABB示教器中使用的最多的一个功能了。它集成rapid程序的创建、修改、调试于一身。在程序编辑器的调试菜单中: “pp移至main”、“pp移至例行程序”、“pp移至光标”这三个功能肯定是会用ABB机器人的都知道。那么还有一些其它的“冷门”菜单,我猜有的小伙伴可能碰都没碰过。因为我不知道它是干啥的,我也用不到。其实不是“用不到”,只是“不知道”而已,这次我们就来详细解读一下程序编辑器中调试菜单的各个含义究竟是干啥的。
PP移至Main:
PP指的是ProgramPointer,程序指针的意思。机器人程序是从PP所指的指令处开始(继续)执行的。
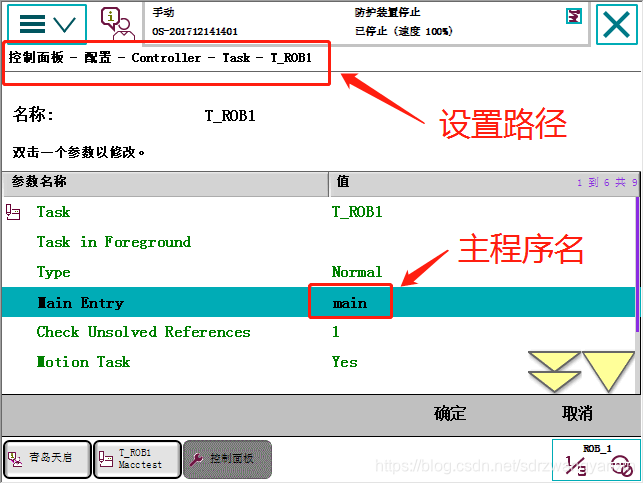
Main就是我们通常所说的主程序。不过主程序不一定都叫main,它的名称我们是可以自定义的。定义方法如下图。
所以PP移至Main的含义就是程序指针移至主程序。
PP移至光标、光标移至PP:
光标在程序编辑器中是以蓝色突出显示的,它可以选中rapid程序中的任意元素,指令、数据、备注等。
所以PP移至光标的意思就是程序指针移动到我们rapid选中的地方。光标移至PP就是选中程序指针所指的地方。
PP移至例行程序:
将程序指针移动到所选择的例行程序。
光标移至MP:
MP指的是MotionPointer,运动指针的意思。指示的是机器人当前正在执行的运动指令。通常比“程序指针”落后一个或几个指令,因为系统执行和计算机器人路径比执行和计算机器人移动更快。
所以光标移至MP的意思是选中当前机器人正在执行或停留的运动指令。
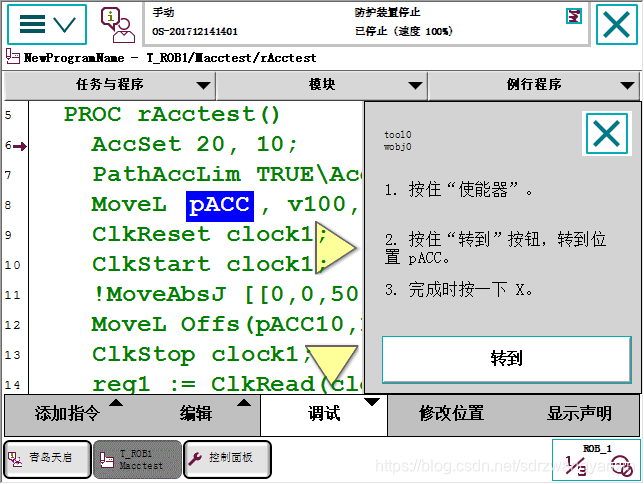
移至位置:
移至位置可以脱离机器人不依赖于机器人程序而直接将机器人移动到所选位置。只有光标单独选择位置数据(点位)时才可用,选中整条指令不可用。
调用例行程序、取消调用例行程序:
服务例行程序执行一系列常用服务。不同机器人的例行程序可能是不一样的,哪些服务例行程序可供使用取决于机器人系统设置及可用选项。调用例行程序就是运行例行程序。取消调用例行程序就是退出例行程序。

下面介绍一下常用到的几个。
Bat_shutdown:电池关闭服务程序,用于暂时关闭SMB电池。
ServiceInfo:维护信息服务程序,用于查看或重置服务信息。常用于机器人维护保养时的维护信息清除。
LoadIdentify:载荷测定服务程序,用于自动识别安装于机器人之上的载荷数据。
BrakeCheck:制动器检查服务程序,用于验证机器人抱闸运行是否正常。
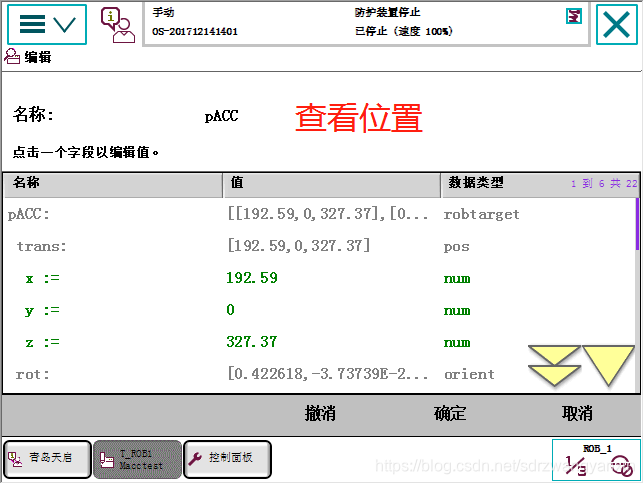
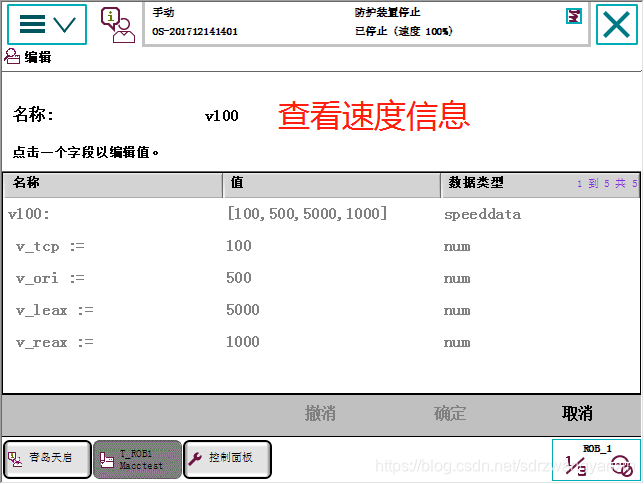
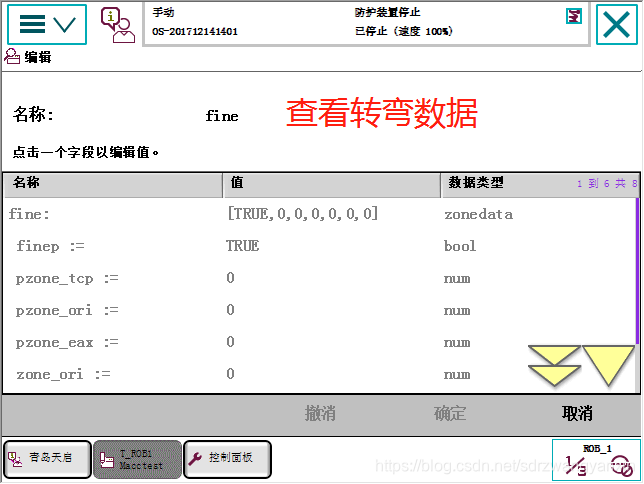
查看值:
在程序调试中非常有用。其实它应该叫做“查看与修改值”,因为它不仅可以查看值,还可以修改值(系统内部的只能查看)。支持所有的已知的数据类型。

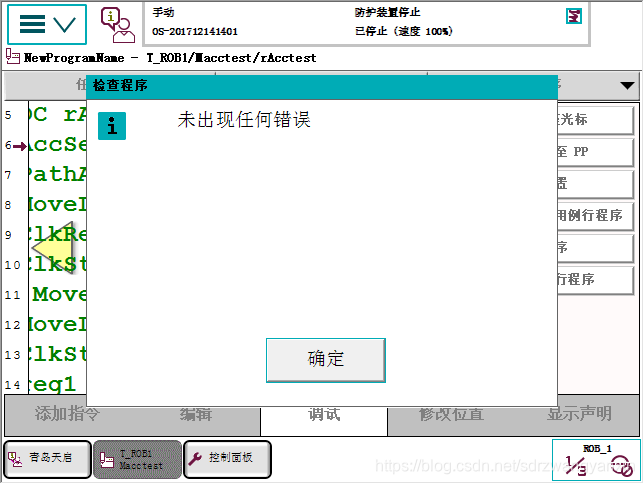
检查程序:
检查程序中有没有错误。
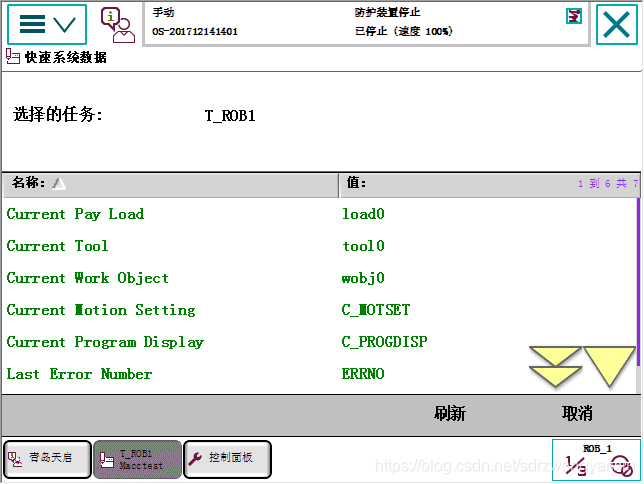
查看系统数据:
查看所选任务的各种状态。
搜索例行程序:
在全部模块中搜索所有例行程序(不包括隐 藏例行程序)。

文章首发自动化生产之家

















 4145
4145

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









