







布料的模拟有多种方法,可以实现,下面分别介绍之
1. explicit mass spring simulation
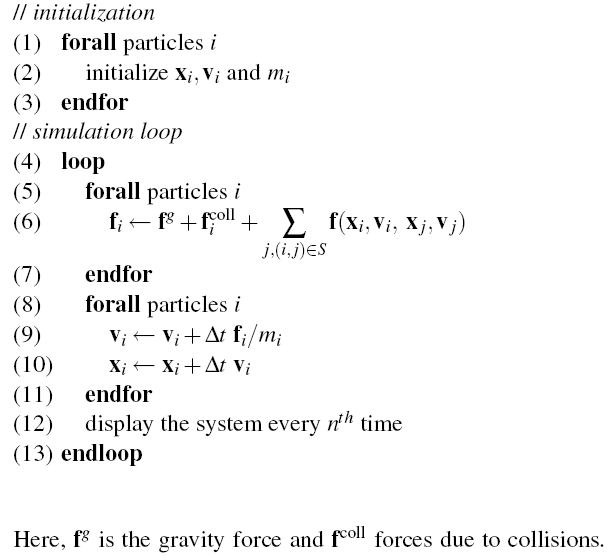
下面看下关键部分的实现代码
void Simulator::ExplicitMassSpring()
{
for(int i=0;i<m_meshpool.size();i++)
{
for( int j = 0; j < m_meshpool[i]->m_vertices_number; ++j )
m_meshpool[i]->m_external_force.block_vector(j) = EigenVector3(0, g_gravity, 0);
}
for(int i=0; i<m_meshpool.size(); i++)
{
VectorX force_current;
computeForcesWithDamping(m_meshpool[i]->m_current_positions, m_meshpool[i]->m_current_velocities, force_current, i);
//computeForces(m_meshpool[i]->m_current_positions, force_current, i);
m_meshpool[i]->m_current_velocities = m_meshpool[i]->m_current_velocities + m_timestep * m_meshpool[i]->m_identity_matrix * force_current;
m_meshpool[i]->m_current_positions = m_meshpool[i]->m_current_positions + m_meshpool[i]->m_current_velocities * m_timestep;
}
}void Simulator::computeForcesWithDamping(const VectorX& x, const VectorX& v, VectorX& force, unsigned int meshid)
{
VectorX constraintForce;
constraintForce.resize(m_meshpool[meshid]->m_system_dimension);
constraintForce.setZero();
// springs
for (map<pair<int, int>, Constraint*>::iterator it = m_meshpool[meshid]->m_mapConstraint.begin(); it != m_meshpool[meshid]->m_mapConstraint.end(); ++it)
{
it->second->EvaluateForceWithDamping(x, v, constraintForce);
}
// external forces
constraintForce += m_meshpool[meshid]->m_external_force;
force = constraintForce;
}
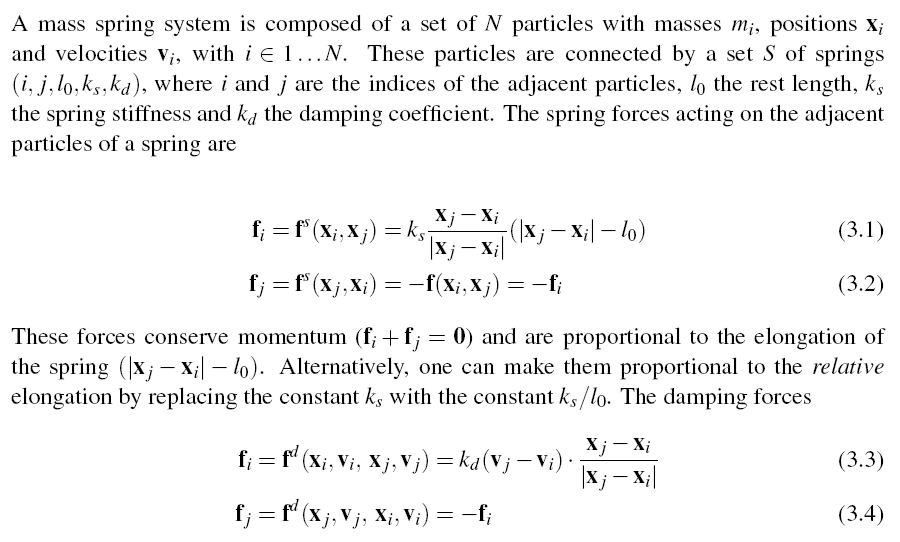
其中,damping force 和spring force的计算如下:
void AttachmentConstraint::EvaluateForceWithDamping(const VectorX& x, const VectorX& v, VectorX& force)
{
EigenVector3 x_i = m_fixd_point - x.block_vector(m_p0);
EigenVector3 g_i;
if( x_i.isZero() )
{
g_i = (*(m_stiffness))* x_i;
}
else
{
g_i = (*(m_stiffness))* x_i - (*(m_damping)) * v.block_vector(m_p0).dot( x_i.normalized() ) * x_i.normalized();
}
force.block_vector(m_p0) += g_i;
}void SpringConstraint::EvaluateForceWithDamping(const VectorX& x, const VectorX& v, VectorX& force)
{
EigenVector3 x_ij = x.block_vector(m_p2) - x.block_vector(m_p1);
EigenVector3 g_ij = (*(m_stiffness))*(x_ij.norm()-m_rest_length)*x_ij.normalized();
force.block_vector(m_p1) += g_ij;
force.block_vector(m_p2) -= g_ij;
EigenVector3 v_ij = v.block_vector(m_p2) - v.block_vector(m_p1);
if( x_ij.isZero() )
{
}
else
{
g_ij = (*(m_damping)) * v_ij.dot(x_ij.normalized()) * x_ij.normalized();
force.block_vector(m_p1) += g_ij;
force.block_vector(m_p2) -= g_ij;
}
}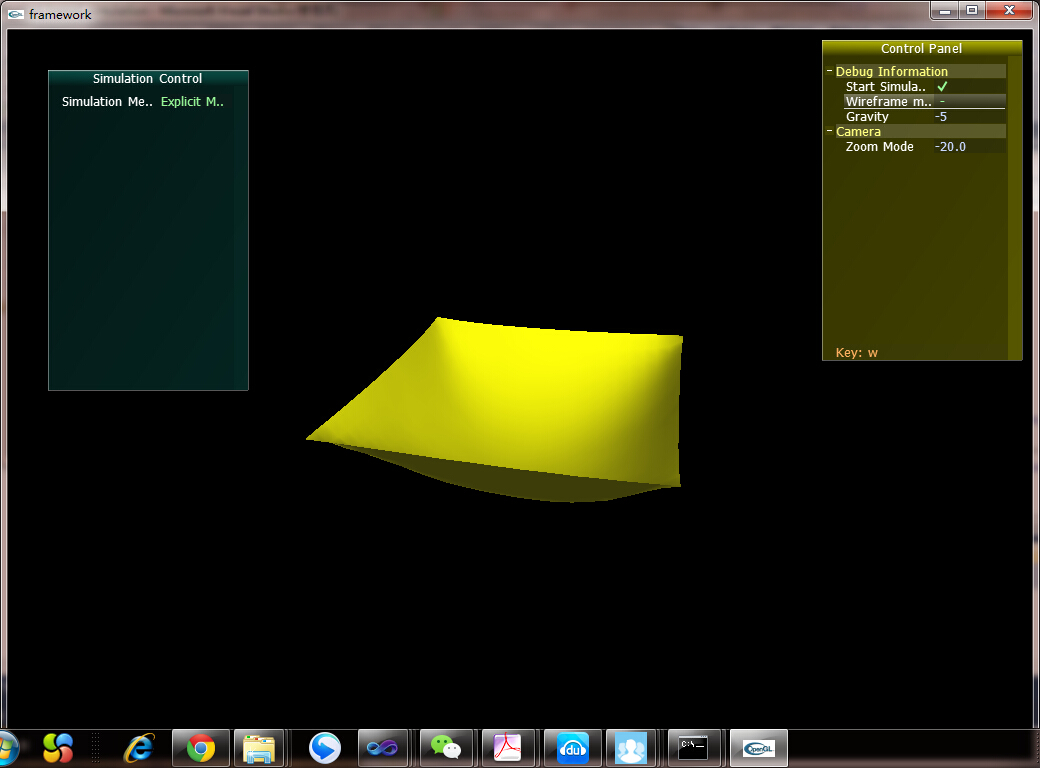
视频地址:https://youtu.be/dMgJ1AEy4Ko
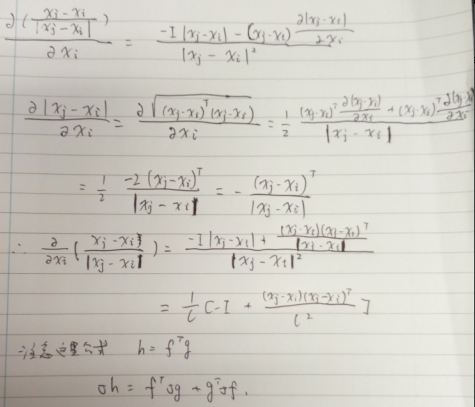
2.implicit mass spring simulation
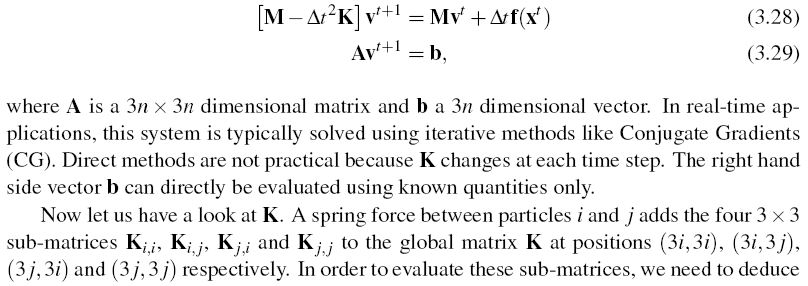
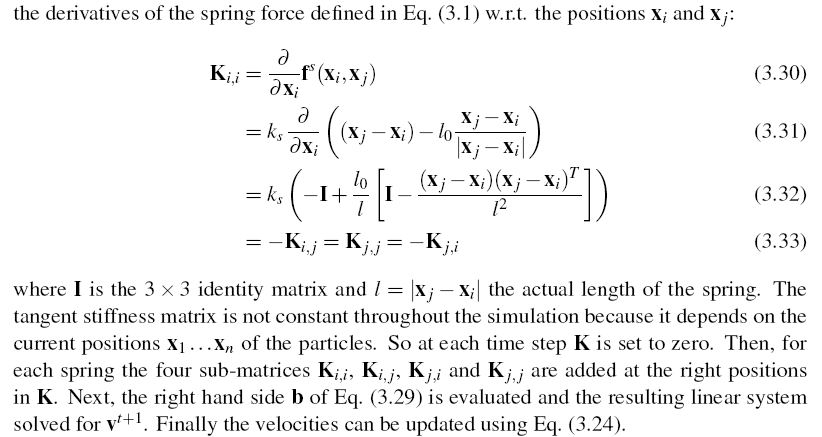

这里注意Ki,i的求法:
关键代码如下:
void Simulator::ImplicitMassSpring()
{
for( int i = 0; i < m_meshpool.size(); ++i )
{
VectorX force_current;
//computeForcesWithDamping(m_meshpool[i]->m_current_positions, m_meshpool[i]->m_current_velocities, force_current, i);
computeForces(m_meshpool[i]->m_current_positions, force_current, i);
//PrintVectorInDebugWindow(L"force_current", force_current);
SparseMatrix K;
computeJacobianOfF(m_meshpool[i]->m_current_positions, K, i);
//PrintMatrixInDebugWindow( L"K", K);
ScalarType deltaTSquare = m_timestep * m_timestep;
SparseMatrix A = ( m_meshpool[i]->m_mass_matrix - deltaTSquare * K);
VectorX b = m_meshpool[i]->m_mass_matrix * m_meshpool[i]->m_current_velocities + m_timestep * force_current;
//PrintVectorInDebugWindow( L"b", b);
Eigen::ConjugateGradient<SparseMatrix> cg;
cg.compute(A);
VectorX nextVel = cg.solve(b);
m_meshpool[i]->m_current_positions = m_meshpool[i]->m_current_positions + m_timestep * nextVel;
m_meshpool[i]->m_current_velocities = nextVel;
}
}void Simulator::computeJacobianOfF(const VectorX& x, SparseMatrix& K, unsigned meshid)
{
K.resize( m_meshpool[meshid]->m_system_dimension, m_meshpool[meshid]->m_system_dimension);
std::vector<SparseMatrixTriplet> vecTriplet;
vecTriplet.clear();
for (map<pair<int, int>, Constraint*>::iterator it = m_meshpool[meshid]->m_mapConstraint.begin(); it != m_meshpool[meshid]->m_mapConstraint.end(); ++it)
{
it->second->EvaluateJacobianOfF(x, vecTriplet);
}
K.setFromTriplets(vecTriplet.begin(), vecTriplet.end());
}void AttachmentConstraint::EvaluateJacobianOfF(const VectorX& x, std::vector<SparseMatrixTriplet>& jacobian_triplets)
{
ScalarType ks = *(m_stiffness);
jacobian_triplets.push_back(SparseMatrixTriplet(3 * m_p0, 3 * m_p0, -ks));
jacobian_triplets.push_back(SparseMatrixTriplet(3 * m_p0 + 1, 3 * m_p0 + 1, -ks));
jacobian_triplets.push_back(SparseMatrixTriplet(3 * m_p0 + 2, 3 * m_p0 + 2, -ks));
}void SpringConstraint::EvaluateJacobianOfF(const VectorX& x, std::vector<SparseMatrixTriplet>& jacobian_triplets)
{
EigenVector3 x_ij = x.block_vector(m_p2) - x.block_vector(m_p1);
ScalarType l_ij = x_ij.norm();
ScalarType l0 = m_rest_length;
ScalarType ks = *(m_stiffness);
EigenMatrix3 k = ks * (-EigenMatrix3::Identity() + l0 / l_ij * ( EigenMatrix3::Identity() - ( x_ij * x_ij.transpose()) / ( l_ij * l_ij)));
for( int row = 0; row < 3; ++row)
{
for( int col = 0; col < 3; ++col)
{
ScalarType val = k(row, col);
jacobian_triplets.push_back(SparseMatrixTriplet(3 * m_p1 + row, 3 * m_p1 + col, val));
jacobian_triplets.push_back(SparseMatrixTriplet(3 * m_p1 + row, 3 * m_p2 + col, -val));
jacobian_triplets.push_back(SparseMatrixTriplet(3 * m_p2 + row, 3 * m_p1 + col, -val));
jacobian_triplets.push_back(SparseMatrixTriplet(3 * m_p2 + row, 3 * m_p2 + col, val));
}
}
}视频地址:https://youtu.be/HGtPOt5Ng7A















 2826
2826

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









