







1. 任务间通信的两种方式
1.1 通过全局变量方式进行任务间通信
这种任务间通信方式涉及到临界资源问题,每个任务或 ISR 必须确保它对全局变量具有独占访问权限,因此必须对全局变量进行临界资源保护。任务间的临界资源保护,可以通过关中断、关闭任务调度、信号量、互斥锁实现。当涉及到ISR的临界资源保护,唯一方式是关闭中断。从任务到ISR方向的消息传递,只能使用全局变量的任务间通信方式。
1.2 通过消息队列进行任务间通信,以避免资源竞争问题。
2. 使用消息队列
2.1 系统消息队列使用
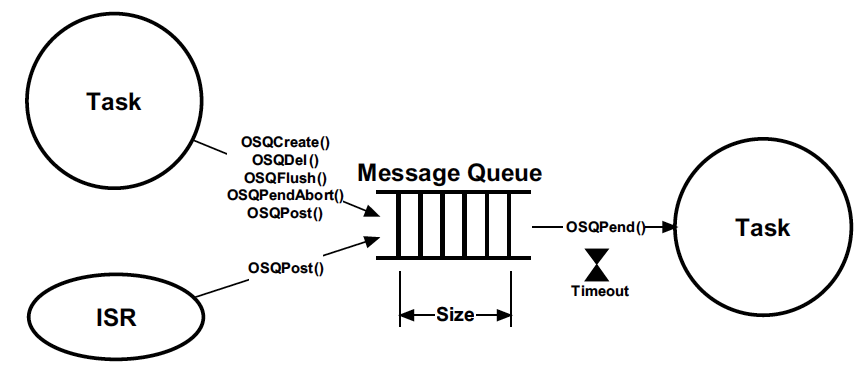
系统消息队列操作模型
| OSQCreate() | 创建消息队列,不可以在ISR中调用 |
| OSQDel() | 删除消息队列,不可以在ISR中调用 |
| OSQFlush() | 清空消息队列,不可以在ISR中调用 |
| OSQPend() | 等待消息,不可以在ISR中调用 |
| OSQPendAbort() | 中断等待消息,不可以在ISR中调用 |
| OSQPost() | 发送消息到消息队列 |
系统消息队列是应用程序分配的内核对象,只要内存足够,可以分配任意数量的系统消息队列。发送消息前必须使用OSQCreate创建消息,只有OSQpost能在ISR中调用。 消息队列默认使用进进先出管道 (FIFO),也可以在发送消息时指定为后进先出机 (LIFO)的 发布消息。当任务或 ISR 必须向任务发送“紧急”消息时,后进先出机制很有用。
2.2 任务消息队列使用
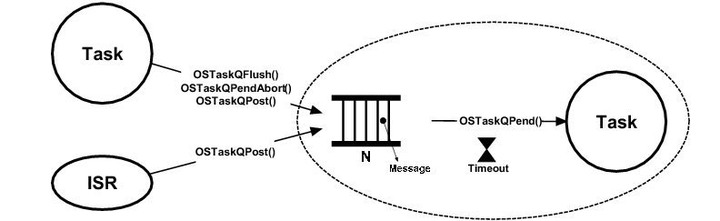
| OSTaskQPend() | 等待消息,不可以在ISR中调用 |
| OSTaskQPendAbort() | 中断等待消息,不可以在ISR中调用 |
| OSTaskQPost() | 发送消息到任务消息队列 |
| OSTaskQFlush() | 清空任务消息队列,不可以在ISR中调用 |
在单个消息队列上等待多个任务的场景,在嵌入式开发中是不应该出现的。因此,可以直接使用任务内置的消息队列发送消息,无需通过创建系统消息队列进行消息床底。使用任务消息队列不仅简化了代码,而且使用任务消息队列占用的资源相对较小、代码结构更清晰、执行效率更高。
3. 消息队列的实现
3.1 消息队列关键数据结构
3.1.1 消息控制块OS_MSG
struct os_msg {
OS_MSG *NextPtr; //指向下一条消息的指针
void *MsgPtr; //指向消息内容的指针
OS_MSG_SIZE MsgSize; //消息内容的大小
CPU_TS MsgTS; //消息发送的时间
};3.1.2 消息队列 OS_MSG_Q
struct os_msg_q {
OS_MSG *InPtr; //指向下一个消息插入的位置
OS_MSG *OutPtr; //指向下一个消息提取的位置
OS_MSG_QTY NbrEntriesSize; //消息队列限制的消息控制块数量
OS_MSG_QTY NbrEntries; //消息队列现在的消息控制块数量
OS_MSG_QTY NbrEntriesMax; //消息队列消息控制块数量峰值
CPU_INT16U MsgQID; //消息队列ID
};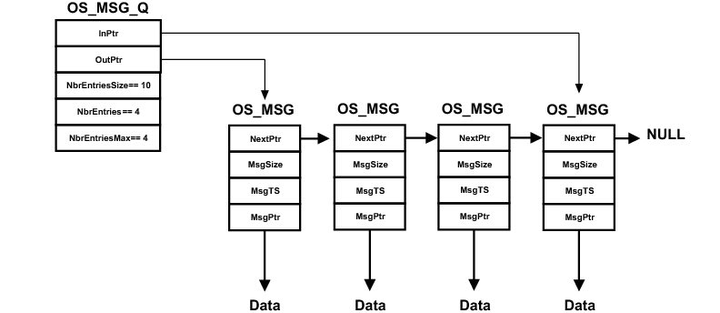
消息队列里的消息控制块
3.1.3 消息池
struct os_msg_pool {
OS_MSG *NextPtr; //指向下一个消息块
OS_MSG_QTY NbrFree; //消息池里空闲的消息块数量
OS_MSG_QTY NbrUsed; //消息池里已被使用的消息块数量
OS_MSG_QTY NbrUsedMax; //消息池里消息块使用峰值
};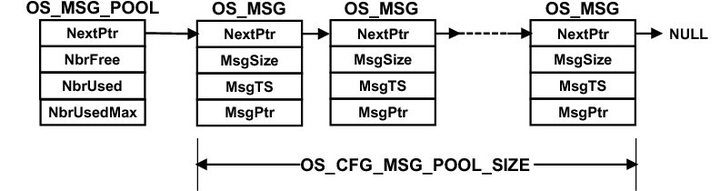
消息池里的消息控制块
3.2 消息队列过程分析
3.2.1 定义静态消息控制块
#define OS_CFG_MSG_POOLSIZE 100u //os_cfg_app.h
OS_MSG OSCfg_MsgPool [OS_CFG_MSG_POOLSIZE]; //os_cfg_app.c
OS_MSG * const OSCfg_MsgPoolBasePtr = &OSCfg_MsgPool[0]; 3.2.2 消息池初始化
OSInit()-->OS_MsgPoolInit()
void OS_MsgPoolInit (OS_ERR *p_err){
p_msg1 = OSCfg_MsgPoolBasePtr;
p_msg2 = OSCfg_MsgPoolBasePtr;
p_msg2++;
loops = OSCfg_MsgPoolSize - 1u;
//把静态消息控制块转换为消息控制块单链表,并把消息控制块初始化
for (i = 0u; i < loops; i++) { */
p_msg1->NextPtr = p_msg2;
p_msg1->MsgPtr = (void *)0;
p_msg1->MsgSize = 0u;
p_msg1++;
p_msg2++;
}
//单链表中的最后一个消息控制块初始化
p_msg1->NextPtr = (OS_MSG *)0; */
p_msg1->MsgPtr = (void *)0;
p_msg1->MsgSize = 0u;
//初始化消息池
OSMsgPool.NextPtr = OSCfg_MsgPoolBasePtr;//指向消息控制块单链表
OSMsgPool.NbrFree = OSCfg_MsgPoolSize; //消息池大小初始化为静态消息控制块的大小
OSMsgPool.NbrUsed = 0u;
}3.2.3 创建消息队列
使用系统消息队列时需要调用 OSQCreate()创建一个系统消息队列。每个任务里都已经创建了一个任务级的消息队列,可直接使用。
3.2.4 消息发送
调用OSQPost() 发送一个消息到指定的系统消息队列中.
调用OSTaskQPost() 发送一个消息到指定的任务消息队列中。
发送消息前,从消息池中取出一个消息控制块,用所发送消息的大小及消息指针对消息控制块进行初始化,插入到系统消息队列或任务消息队列中,然后调用 OSSched()唤醒被此消息队列阻塞的任务。
3.2.5 消息接收
接收消息的任务被唤醒后,从消息队列中取出消息控制块,提取消息体大小及消息体进行处理,处理完后把消息控制块从消息队列中删除,重新放回到消息池中。
4. 消息队列流量控制的实现
4.1 系统消息队列流量控制
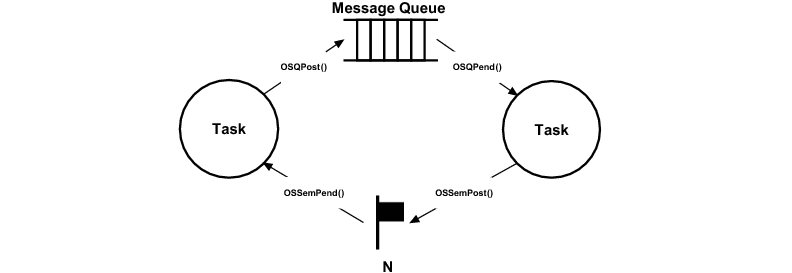
系统消息队列流量控制模型
4.2 任务消息队列流量控制

任务消息队列流量控制模型
4.3 消息队列流量控制伪代码
Producer Task:
Pend on Semaphore;
Send message to message queue;
Consumer Task:
Wait for message from message queue;
Signal the semaphore;5. 消息队列总结
a. 从任务到ISR方向的消息传递,只能使用全局变量的任务间通信方式。
b. 消息发送时,并没有复制消息体。消息体可使用动态内存分配,发送消息前申请,消息接收处理后释放。
c. 可以使用任务消息队列,就不使用系统消息队列。
d. 可以使用消息队列进行任务间通信,就不使用共享内存进行任务间通信。
















 1336
1336











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











