







STM32MPC_Target-Tracking_UAV基于非线性模型预测控制的目标跟踪约束
matlab 需要插件casadi插件
仅供参考
有参考文件
ID:27315697830321684
馨儿佑儿
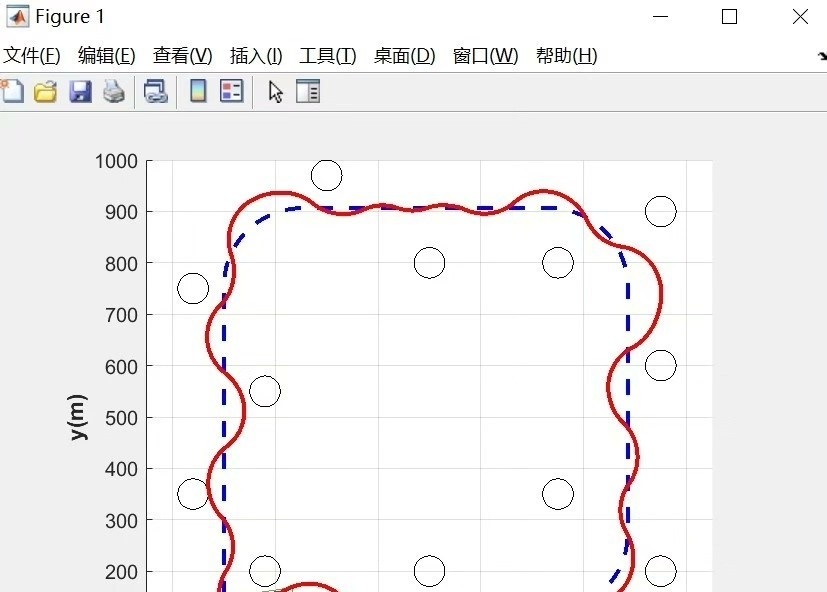
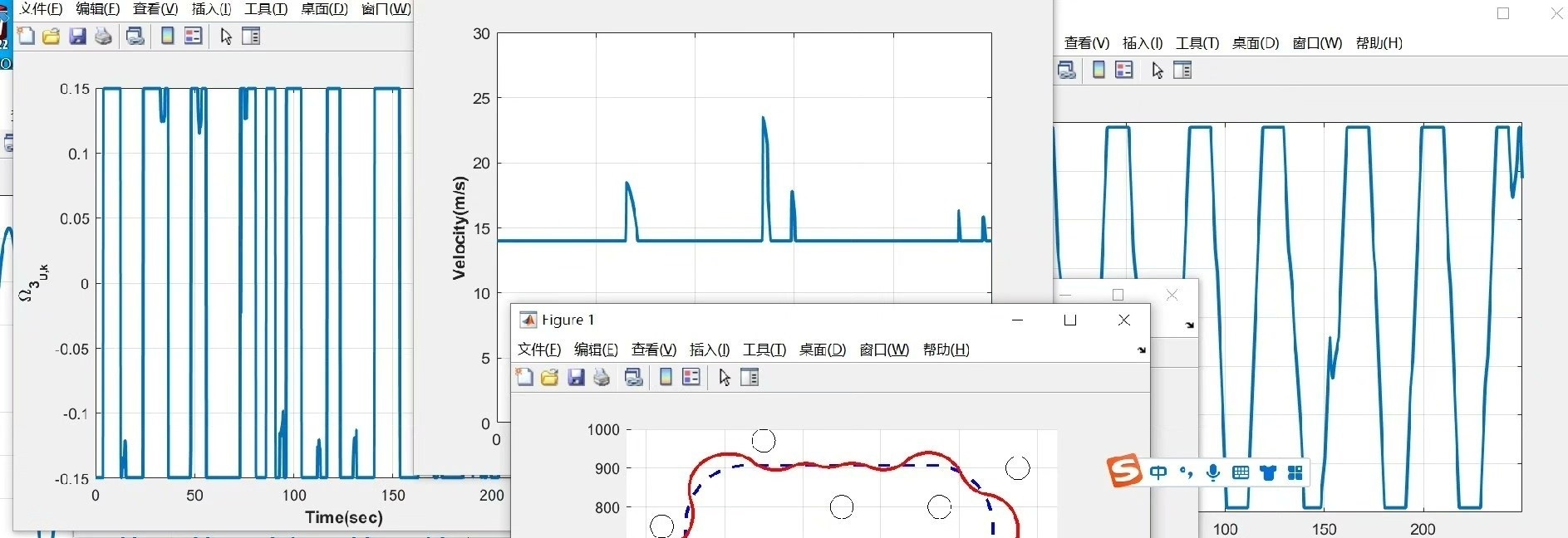
STM32MPC是一款基于非线性模型预测控制的目标跟踪约束的无人机(Unmanned Aerial Vehicle, UAV)系统。在该系统中,使用了STM32微控制器作为处理器,通过非线性模型预测控制的方法来实现对目标的跟踪约束控制。该系统的设计主要是为了提高无人机在目标跟踪任务中的精确度和稳定性。
在目标跟踪约束任务中,我们首先需要了解目标的位置和运动状态。为了实现这一目标,我们使用了matlab软件,并借助casadi插件来进行数据处理和分析。通过收集和分析目标的位置和运动状态数据,我们能够更准确地预测目标的下一步行动,并相应地调整无人机的飞行路径和姿态。
在STM32MPC系统中,我们实现了一个非线性模型预测控制器。该控制器能够根据当前目标的位置和运动状态,通过模型预测方法来预测目标的未来位置。在此基础上,控制器会生成一系列控制信号,以约束无人机的运动轨迹
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2709
2709

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









